Schneider P., Eberly D.H. Geometric Tools for Computer Graphics
Подождите немного. Документ загружается.

744 Chapter 13 Computational Geometry Topics
// tangent segment has been found
break;
}
// Trap any problems due to floating-point round-off errors.
assert(i < LHull.n + RHull.n);
}
As each vertex is visited on one hull, the current edge on the other hull is tested
for visibility using
CollinearTest. When visible, the returned value is usually NEGA-
TIVE
. However, care must be taken when the initial extreme points on the hulls are
on the same vertical line. Figure 13.38 shows a typical scenario. The initial candi-
date tangent is L
1
, R
0
, shown in Figure 13.38(a). In attempting to traverse the left
hull, the output of
CollinearTest(R0,L0,L1) is COLLINEAR_RIGHT. The left hull index
remains unchanged, and a traversal is attempted on the right hull. The output of
CollinearTest(L1,R0,R1) is also COLLINEAR_RIGHT. In this case the right hull index is
incremented, effectively as if R
0
were slightly to the right of the common vertical line.
Figure 13.38(b) shows the current state after the increment. The traversal switches
back to the left hull. The output of
CollinearTest(R0,L0,L1) is once again COLLINEAR_
RIGHT
, and the left hull index remains unchanged. The traversal switches to the right
hull. The output of
CollinearTest(L1,R0,R1) is COLLINEAR_RIGHT, and the right hull
index is incremented, again as if R
0
were slightly to the right of the common vertical
line. Figure 13.38(c) shows the current state after the increment. Switching back to the
left hull, the output of
CollinearTest(R0,L0,L1) is NEGATIVE since the edge R
0
, R
1
is fully visible. The left hull index is decremented. Figure 13.38(d) shows the cur-
rent state after the decrement. The loop is iterated one more time, but both calls to
CollinearTest return POSITIVE, and L
1
, R
0
in Figure 13.38(c) is tangent to the two
hulls.
Once both tangents to the hulls are found, the construction of the merged hull
is structured the same as for the incremental hull construction. The pseudocode
shows the creation of a temporary convex polygon that contains subsets of indices
from both hulls based on the tangent point locations, but just as in the incremental
construction, a linked list structure can be used, and the detachment, attachment,
and sublist deletion can all be performed in O(1) time. However, the total time is still
O(n) because of the traversals over the two input hulls to find the extreme points.
13.7.2 Convex Hulls in 3D
The ideas in 2D for constructing convex hulls of point sets using the incremental
method or the divide-and-conquer method extend naturally to 3D. The incremental
method has an easily implementable extension. The divide-and-conquer method is
significantly more difficult to implement.
13.7 Convex Hulls 745
(d)
R
1
R
0
L
1
L
0
R
1
R
0
L
1
L
0
R
0
R
1
L
1
L
0
R
0
R
1
L
1
L
0
(a) (b) (c)
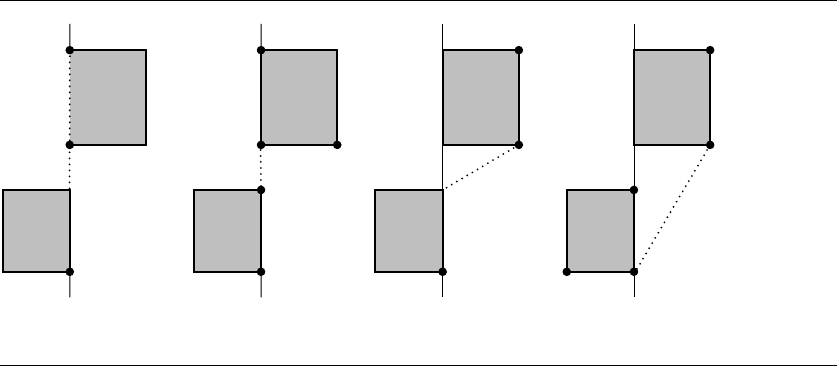
Figure 13.38 The extreme points used to initialize tangent search are on the same vertical line. The
initial visibility tests both do not yield a
NEGATIVE test, yet the initial segment connecting
the extremes is not a tangent to the hulls. The current candidate for the tangent is shown
as a dotted line.
Incremental Construction
The 3D algorithm is similar to the 2D algorithm. Each point is processed and merged
with the convex hull of the previous points. The dimension of the hull is monitored
to make sure that collinear points lead to a line segment hull and coplanar points
lead to a planar convex polygon. The typical case is when the hull becomes a convex
polyhedron.
The merge operation is slightly more complex than in the 2D case. Instead of
two tangent lines, we obtain a visibility cone (not to be confused with the cone
that is a quadric surface) whose vertex is the point to be merged and whose final
edges form a closed polyline of current hull edges that separate the visible faces
from the hidden ones. The closed polyline is sometimes called the terminator, aword
used in astronomy to denote the boundary between the lit and unlit regions of an
astronomical body. Figure 13.39 illustrates the typical situation. The visible faces
must be removed from the current hull, and the faces of the visibility cone must be
added. A simple algorithm for doing this involves traversing over all current faces,
finding those faces with an edge on the terminator, and storing the edges in some
data structure. During the traversal, visible faces are discarded and hidden faces are
kept. Once all faces have been visited, the terminator is known as a closed polyline.
The polyline is traversed, and faces formed by each edge with P are constructed and
added to the merged hull data structure.
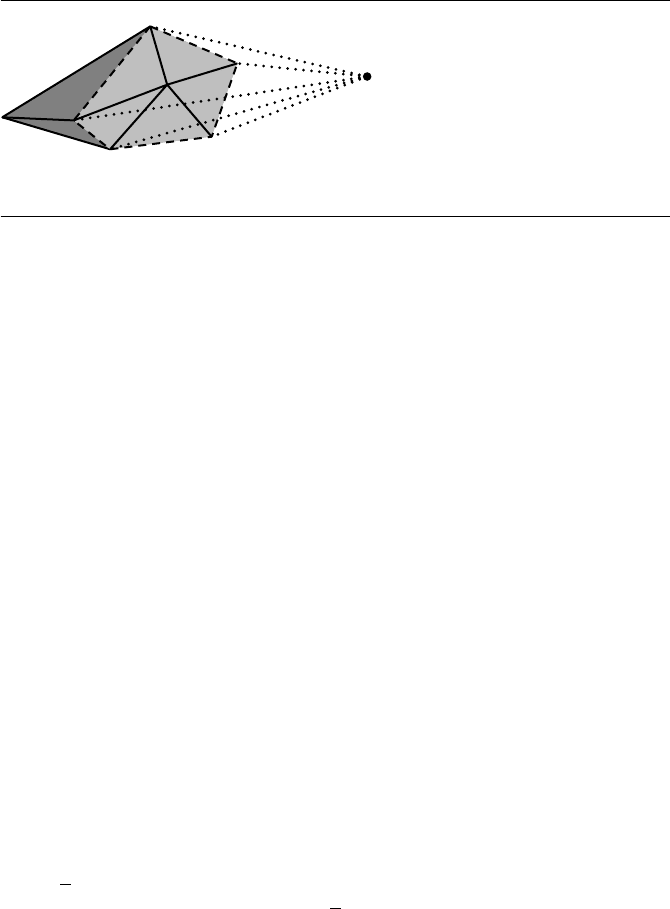
746 Chapter 13 Computational Geometry Topics
Current hull
P
Figure 13.39
The current hull and point to be merged. The visible faces are drawn in light gray. The
hidden faces are drawn in dark gray. The polyline separating the two sets is dashed.
The other edges of the visibility cone are dotted.
An algorithm for finding the terminator that is more efficient, but more compli-
cated to implement, uses a linear search for a terminator edge. If a face lies on the
plane ˆn · X + d = 0, where ˆn is a unit-length normal, the signed distance from P
to the plane is δ =ˆn · P + d.Ifδ>0, the plane is visible to P (and so is the cor-
responding face). If δ ≤ 0, the plane is hidden, as is the corresponding face. In the
case δ = 0, the closest edge of the face is potentially visible to P , but that edge is
part of another face for which δ ≥0. The face mesh for the current convex hull has a
dual graph whose nodes represent the faces and whose arcs represent the edges of the
faces. In particular, an arc between two nodes indicates that the corresponding faces
are adjacent. Each node is assigned the signed distance from P to the face. Starting
at a node in the graph with positive signed distance, a search is made to find a path
of nodes whose distances are decreasing (more accurately, nonincreasing). The next
node visited from the current node is the one whose signed distance is the smallest
positive value of all adjacent nodes. Because the hull is convex, eventually a node must
be reached that has at least one adjacent node with a nonpositive signed distance. The
shared edge is on the terminator by definition. Once a first terminator edge is found,
and assuming a data structure that maintains a list of adjacent edges for each vertex,
the terminator can be traversed.
Observe that this approach is closely related to finding a zero-level curve of an
image (the signed distances) defined on a graph of pixels. The intuition on the order
of the algorithm follows from this. If the image were square with n pixels (number
of faces in our problem), the linear search for the first point on the zero-level curve
is O(
√
n). The traversal along the zero-level curve (the terminator in our problem)
is also a linear search, again taking O(
√
n) time. The simple algorithm mentioned
earlier visits all triangles, taking O(n) time, an asymptotically slower method.
The pseudocode for the top-level call is
ConvexPolyhedron IncrementalHull(int n, Point V[n])
{
Sort(n, V);
13.7 Convex Hulls 747
RemoveDuplicates(n, V);
ConvexPolyhedron hull;
type = POINT;
hull[0] = V[0];
for(i=1;i<n;i++) {
switch (type) {
case POINT: type = LINEAR; hull[1] = V[i]; break;
case LINEAR: MergeLinear(V[i], hull,type); break;
case PLANAR: MergePlanar(V[i], hull,type); break;
case SPATIAL: MergeSpatial(V[i], hull); break;
}
}
return hull;
}
The data structure for the convex polyhedron is most likely different for the
spatial case than for the other cases. The natural storage for a linear hull is an array of
two points, the end points of the line segment that is the hull. The natural storage for
a planar hull is an array or list of ordered points. The natural storage for a spatial hull
is more complicated. In its most abstract form, the data structure is a vertex-edge-
face table that allows adding and removing each of the primitive components. In an
application that is triangle based, the faces are stored as triangle fans. For 2D convex
polygons, support can be added for collapsing collinear edges to a single edge. In 3D,
the triangle fans can be collapsed into convex polygons, and the collinear edges of
those convex polygons can be collapsed into single edges.
The function
MergeLinear is nearly identical to the one for the 2D incremental
hull. However, if the three input points (the next point to be merged and the end
points of the current line segment hull) are not collinear, they lie on a plane and
have no specific ordering (i.e., positive or negative as in the 2D case) until a normal
vector is chosen for that plane. A normal vector should be chosen so that if the hull
eventually becomes spatial, the first face is a convex polygon, and the normal can
be used to reorder the vertices (if necessary) so that the polygon is counterclockwise
ordered when viewed from outside the hull.
The function
MergePlanar is slightly different from that of the 2D case. If the
next input point is on the current plane, then the 2D merge algorithm is applied to
update the current hull, a convex planar polygon, to another convex planar polygon.
The merge is, of course, applied to points as 3D entities. If the next input point
is not on the current plane, the hull becomes spatial, and
MergeSpatial takes over
for subsequent merges. If the data structure used to represent convex polyhedrons
is a triangle mesh stored as a vertex-edge-triangle table, then the current hull, a
convex planar polygon, must be fanned into triangles that are added to the table.
The additional triangles formed by the next input point and the edges of the convex
polygon are also added. The normal vector calculated earlier can be used at this time
to make sure the triangles are added to be counterclockwise ordered when viewed
from the outside of the spatial hull.
748 Chapter 13 Computational Geometry Topics
The function
MergeSpatial performs the duties described earlier. By whatever
means, the visible faces of the current hull are removed, and the new faces formed
by the terminator and the next input point are added.
Divide-and-Conquer Method
The basic construction is similar to that in 2D. The input points are sorted along some
axis. The set of points is divided into two sets, and the hulls are computed recursively
on those sets. The resulting hulls are merged into a single hull with an algorithm that
is O(n) in time.
The idea is to wrap a plane about the two input hulls. The end result is a strip
consisting of triangles and/or quadrilaterals that become the new faces of the merged
hull. Figure 13.40 illustrates with two icosahedrons that are merged into a single
convex polyhedron. The wrapping begins by finding a supporting plane for the two
input hulls, a plane that is tangent to both hulls. For each hull the set of tangency is
either a vertex, an edge, or a face. If the set is a face, we need only consider a single
edge of the face, one visible to the other supporting set, to start the wrapping process.
Because we need only consider vertices and edges, the new faces on the merged hull
are either triangles or quadrilaterals.
Regardless of the type of supporting sets for the hulls, there must be vertices P
0
and Q
0
, one from each hull, so that the line segment P
0
, Q
0
is an edge of the merged
hull. One half of the supporting plane containing that edge is “folded” along the line
containing the edge until another hull vertex is encountered. If this vertex is on the
first hull, call it P
1
, then it must be adjacent to P
0
. The triangle P
0
, P
1
, Q
0
is a face of
the merged hull. Similarly, if the vertex is on the second hull, call it Q
1
, then it must
be adjacent to Q
0
. The triangle Q
0
, Q
1
, P is a face of the merged hull. It is possible
that both P
1
and Q
1
are encountered simultaneously, in which case the quadrilateral
formed by the four points is a face of the merged hull. The plane is folded again
on the line containing the next leading edge of the last found face. The process is
repeated until the original folding edge is revisited. As described in O’Rourke (1998),
the asymptotical analysis shows that the amortized cost for this search is O(n).
Once the merged hull faces are constructed by the plane wrapping, the old faces
that are no longer visible must be removed. In the 3D incremental hull construction,
the merge is applied to a single point and a convex polyhedron. Recall that the
terminator is the closed polyline of edges on the convex polyhedron that separates
the visible faces from the hidden ones relative to the single point. As a graph whose
nodes are the terminator vertices and whose arcs are the edges connecting consecutive
vertices, the terminator is a simple cycle. The merge step in the incremental hull
involved finding the terminator. The most efficient algorithm was to find an edge
of the terminator, then traverse adjacent edges of the terminator that separate two
faces, one of positive signed distance and one of nonpositive signed distance. This
traversal succeeds because the terminator is a simple cycle. Figure 13.40 might lead
you to believe that the terminators for the two input hulls are both simple cycles. As
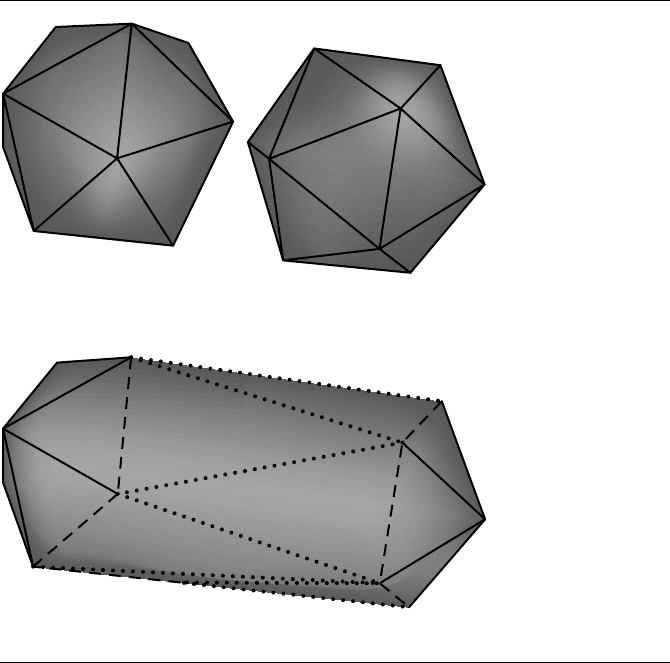
13.7 Convex Hulls 749
(a)
(b)
Figure 13.40 (a) Two icosahedrons. (b) The merged hull. The dashed lines indicate those edges
that are part of faces of the original hulls. The dotted lines indicate those edges that
are part of the newly added faces.
it turns out, this is not necessarily the case. A simple example to illustrate this involves
merging a convex polyhedron and a line segment. The faces that are kept in the
merged hull are those that are hidden to all points on the line segment. Equivalently,
the discarded faces are those that are visible to some point on the line segment. Figure
13.41 shows an example where the convex polyhedron is a pyramid. The terminator
for the pyramid consists of two triangles that share a single vertex. Because of this
possibility, you should be careful not to assume that the terminators are simple cycles
when attempting to delete the visible faces of each input hull. A correct method is to
traverse all edges of the terminator and detach the visible faces from the hidden ones.
It is true that the visible faces on an input hull are in the same connected component,
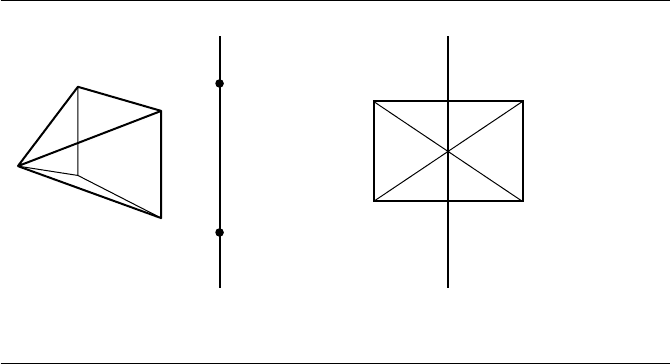
750 Chapter 13 Computational Geometry Topics
5
445
36
2
3
6
2
a
b
0
1
0
1
(a) (b)
Figure 13.41
(a) A side view of the pyramid and line segment. (b) A view from behind the line
segment. The line segment 0, a can only see triangle 2, 3, 6 and quadrilateral
3, 4, 5, 6. The line segment a, b can only see the quadrilateral. The line segment
b,1 can only see triangle 2, 4, 5 and the quadrilateral. The faces that are hidden
in all cases are the triangles 2, 3, 4 and 2, 5, 6. The terminator consists of the
boundaries of these triangles, a sequence of line segments forming two cycles, not
a simple cycle.
so a depth-first search may be used to delete them one at a time. However, with extra
work, an O(1) delete algorithm can be used as long as the application provides a
sophisticated memory manager along the lines that were mentioned for incremental
hull construction in 2D. The idea is to detach the visible faces from the hidden ones,
but allow the component of visible faces to exist until the full hull is constructed. At
that time, an iteration is made over the hull to construct a copy of it. The previous
copy and all the dangling components are part of temporary workspace in memory
that is deleted all at once.
13.7.3 Convex Hulls in Higher Dimensions
Convex hull algorithms in higher dimensions are more complex to implement, but
the ideas for incremental construction and divide-and-conquer construction extend
naturally. The asymptotic behavior is worse due to the result of Klee (1980) that
shows the convex hull of n points in dimension d can have at least the order of
n
d/2
hyperfaces. In particular, in dimension d = 4 the number of hyperfaces can
be quadratic, so it is not possible to construct an O(n log n) algorithm.
13.7 Convex Hulls 751
Incremental Construction
A current hull is maintained whose dimension h starts at 0 (a point) and increases
to some final value h ≤ d,whered is the dimension of the full space. An origin
and set of orthonormal basis vectors is maintained for the current hull. The initial
point from the input set is saved as the origin A. Each time the insertion of an input
point forces h to increase, a unit-length basis vector
ˆ
d
h
is added that is orthogonal
to all the previous basis vectors. At the cost of storing a second copy of the input
points, something that occurred anyway in small dimensions to support sorting of
the points without disturbing the original set, the origin and basis can be used to
represent already processed points in that coordinate system. The advantage is that a
convex hull finder for a specified dimension can be reused by hull finders in larger
dimensions as long as the points are represented as arrays. The point coordinates
for the specified dimension are stored in contiguous locations in the array, so the
convex hull finder can access the coordinates safely within the array. Probably the
most difficult technical challenge is maintaining data structures for the hull in each
dimension. In 3D, a vertex-edge-triangle table can be used to store the hull (convex
polygonal faces with more than three vertices are trifanned). In 4D, a vertex-edge-
triangle-tetrahedron table is required. As the dimension increases, the complexity of
the data structure increases.
A high-level outline for d = 4 is presented here, assuming distinct points and at
least two of them, say, P
0
and P
1
. The points are initially sorted. The initial point is
stored as the origin A =P
0
. The initial basis vector is
ˆ
d
1
=(P
1
−P
0
)/P
1
−P
0
.The
current hull dimension is h = 1. The merge functions are denoted
Merge<h> for each
dimension h ≤ 4. The data structures representing the hull are denoted
Hull<h>.Each
point in the data structure is stored as a 4D array, but only the first h components are
relevant. The initial linear hull therefore effectively stores only two scalars s
i
=
ˆ
d
i
·P
i
,
0 ≤i ≤ 1, that represent the 4D points P
i
= A + s
i
ˆ
d
i
(so s
0
= 0).
The linear merge is shown below.
void Merge<1>(Point P, Hull<1> hull)
{
// uses affine coordinate system {A; D1}
B=P-A;
t1 = Dot(D1, B);
R=B-t1*D1; //project out D1 component
if (|R| > 0) {
// |R| is the length of R
// dimension increases
h=2;
D2=R/|R|; // affine coordinate system becomes {A; D1, D2}
t2 = Dot(D2, B);
ReformatAndInsert(hull, t1, t2); //P=A+t1*D1+t2*D2
752 Chapter 13 Computational Geometry Topics
} else {
// hull is still linear
Update(hull, t1);
}
}
The ReformatAndInsert function for the hull is not complicated. The hull is a line
segment, represented by a pair of points. The insertion of
(t1,t2) requires creation
of a triangle. The triangle can be stored as a triple of points. If the hull remains planar
and more points are merged to form a convex polygon with more than three sides,
the points can be maintained as an ordered list. The
Hull<1> data structure represents
the end points of the line segment with scalars s
0
and s
1
. On the reformatting, these
values become (s
0
,0) and (s
1
,0) to be in the same space as (t
1
, t
2
). All such 2-vectors
are coordinates in the affine system with origin A and basis vectors
ˆ
d
1
and
ˆ
d
2
.
The
Update function finds the terminator of the hull, in this case one of the end
points of the line segment that is the hull. Because of the sorting, exactly one of these
end points must be visible to the input point P . The line segment is appropriately
updated to replace the visible end point by P . The calculations are performed in a
one-dimensionsal space. Since
hull is represented in the Hull<1> format, only the
first array entries are relevant and are all that the routine accesses.
The planar merge is shown below.
void Merge<2>(Point P, Hull<2> hull)
{
// uses affine coordinate system {A; D1, D2}
B=P-A;
t1 = Dot(D1, B);
t2 = Dot(D2, B);
R=B-t1*D1-t2*D2; //project out D1, D2 components
if (|R| > 0) {
// dimension increases
h=3;
D3=R/|R|; // affine coordinate system becomes {A; D1, D2, D3}
t3 = Dot(D3, B);
ReformatAndInsert(hull, t1, t2, t3);
//P=A+t1*D1+t2*D2+t3*D3
} else {
// hull is still planar
Update(hull, t1, t2);
}
}
The ReformatAndInsert function for the hull is nontrivial compared to the func-
tion for the previous dimension. The hull is a planar convex polygon that is repre-
sented as an ordered point list. If the hull representation in space is a vertex-edge-face
13.7 Convex Hulls 753
table, then the current hull is added as a face to that table. The insertion of (t1,t2,t3)
requires the addition of triangular faces to the merged hull, each face formed by this
point and an edge of the convex polygon. If the hull is represented as a vertex-edge-
triangle table, the convex polygon must be trifanned first. The triangles are added to
the table. The triangular faces formed by the inserted point and the edges of the con-
vex polygon are added to the table. The
Hull<2> data structure represents points as
(s
1
, s
2
). On the reformatting, these values become (s
1
, s
2
,0) to be in the same space
as (t
1
, t
2
, t
3
). All such 3-vectors are coordinates in the affine system with origin A and
basis vectors
ˆ
d
1
,
ˆ
d
2
, and
ˆ
d
3
.
The
Update function finds the terminator of the hull, in this case the two vertices
that are tangent points to the hull and form the visibility cone whose vertex is the
input point. The edges visible to P are removed, and new edges formed by P and the
tangent points are added to the hull.
The spatial merge is shown below.
void Merge<3>(Point P, Hull<3> hull)
{
// uses affine coordinate system {A; D1, D2, D3}
B=P-A;
t1 = Dot(D1, B);
t2 = Dot(D2, B);
t3 = Dot(D3, B);
R=B-t1*D1-t2*D2-t3*D3;
// project out the D1, D2, D3 components
if (|R| > 0) {
// dimension increases
h=4;
convert hull from Hull<3> format to Hull<4> format;
D4=R/|R|;
// affine coordinate system becomes {A; D1, D2, D3, D4}
t4 = Dot(D4,B);
ReformatAndInsert(hull, t1, t2, t3, t4);
//P=A+t1*D1+t2*D2+t3*D3+t4*D4
} else {
// hull is still spatial
Update(hull, t1, t2, t3);
}
}
The ReformatAndInsert function for the hull is also nontrivial. The 3D hull is a
spatial convex polyhedron that, for the sake of argument, is stored as a vertex-edge-
triangle table. Also, for the sake of argument, assume that the 4D hull is stored as a
vertex-edge-triangle-tetrahedron table. The convex polyhedron must be partitioned
into tetrahedra first, a process slightly more complicated than triangle fanning. The
tetrahedra are added to the table. The tetrahedral faces formed by the inserted point