Versteeg H., Malalasekra W. An Introduction to Computational Fluid Dynamics: The Finite Volume Method
Подождите немного. Документ загружается.

7.6 POINT-ITERATIVE METHODS 227
We try to modify the convergence rate of the iteration sequence by multi-
plying the second and third terms on the right hand side by the relaxation
parameter
α
:
x
i
(k)
= x
i
(k−1)
+
α
x
j
(k−1)
+ (i = 1, 2,..., n) (7.23)
If we use
α
= 1 in (7.23) we get back to the original Jacobi method (7.18), but
different values of parameter
α
will yield different iterative sequences. When
we choose 0 <
α
< 1 the procedure is an under-relaxation method, whereas
α
> 1 is called over-relaxation.
Before proceeding to apply (7.23) we verify that introduction of the
relaxation parameter
α
changes the iteration path without changing the final
solution. First we compare the expression in the square brackets of (7.23)
with matrix equation (7.16). If the iteration sequence converges, the vector
x
j
(k→∞)
will contain the correct solution of the system, so
a
ij
x
j
(k→∞)
= b
i
(i = 1, 2,..., n)
Dividing both sides by coefficient a
ii
and some rearrangement yields
+ x
j
(k→∞)
= 0(i = 1, 2,..., n) (7.24)
After k iterations the intermediate solution vector x
j
(k)
is not equal to the
correct solution, so
a
ij
x
j
(k)
≠ b
i
(i = 1, 2,..., n) (7.25)
We define the residual r
i
(k)
of the ith equation after k iterations as the dif-
ference between the left and right hand sides of (7.25):
r
i
(k)
= b
i
− a
ij
x
j
(k)
(i = 1, 2,..., n) (7.26)
If the iteration process is convergent the intermediate solution vector x
j
(k)
should get progressively closer to final solution vector x
j
(k→∞)
as the iteration
count k increases, and hence the residuals r
i
(k)
for all n equations should also
tend to zero as k →∞. Finally, we note that the expression in the square
brackets of (7.23) is just equal to the residual r
i
(k−1)
after k − 1 iterations
divided by coefficient a
ii
:
x
i
(k)
= x
i
(k−1)
+
α
(i = 1, 2,..., n) (7.27)
This confirms that the introduction of relaxation parameter
α
does not affect
the converged solution, because all residuals r
i
(k−1)
in the square brackets of
(7.27) will be zero when k →∞.
Next we note that, in terms of the iteration matrix form (7.19a–c) of the
equation, the introduction of the relaxation parameter in (7.23) implies the
J
K
L
r
i
(k−1)
a
ii
G
H
I
n
∑
j=1
n
∑
j=1
−a
ij
a
ii
n
∑
j=1
b
i
a
ii
n
∑
j=1
J
K
L
b
i
a
ii
D
E
F
−a
ij
a
ii
A
B
C
n
∑
j=1
G
H
I
ANIN_C07.qxd 29/12/2006 04:48PM Page 227
228 CHAPTER 7 SOLUTION OF DISCRETISED EQUATIONS
following changes to the coefficients T
ij
of the iteration matrix and constant
vector c
i
:
T
ij
=
−
α
if i ≠ j
(7.28a)
(1 −
α
) if i = j
c
i
=
α
(7.28b)
Thus, we have demonstrated that the relaxation parameter alters the itera-
tion path through changes in the iteration matrix, without altering the final
solution. This suggests that relaxation may be advantageous if we select an
optimum value of
α
that minimises the number of iterations required to
reach the converged solution.
To see if this works in practice we perform the Jacobi iteration scheme
with relaxation (7.23) for the example system (7.14) using the same initial
guess as before: x
1
(0)
= x
2
(0)
= x
3
(0)
= 0 with
α
= 0.75, 1.0 and 1.25. We find that
the process converges to the correct solution x
1
= 1, x
2
= 2, x
3
= 3 after 25, 17
and 84 iterations, respectively. It appears that
α
= 1 is the optimum value for
the Jacobi method and that there is not much to be gained by changes of
α
(at least not for this sample problem).
In spite of this slightly disappointing result we try out the relaxation con-
cept on the Gauss–Seidel method. In this case the iteration equation after k
iterations can be rewritten as
x
i
(k)
= x
i
(k−1)
+ x
j
(k)
+ x
j
(k−1)
+
(i = 1, 2,..., n)
If we introduce the relaxation parameter
α
as before, this yields
x
i
(k)
= x
i
(k−1)
+
α
x
j
(k)
+ x
j
(k−1)
+
(i = 1, 2,..., n) (7.29)
This is the iteration sequence for the Gauss–Seidel method with relaxa-
tion. We leave it as an exercise for the reader to verify that iteration of the
sequence (7.29) using coefficients and the right hand side of example system
(7.14) with
α
= 0.75, 1.0 and 1.25 yields convergence after 21, 13 and 27
iterations, respectively. It seems, once again, that no improvement is pos-
sible, but a slightly more careful search reveals that the iteration sequence
converges to 4 decimal places within 10 iterations for slightly over-relaxed
values of
α
in the range 1.06 to 1.08.
Unfortunately, the optimum value of the relaxation parameter is problem
and mesh dependent, and it is difficult to give precise guidance. Nevertheless,
through experience with a particular range of similar problems it is, at least
in principle, possible to select a value of
α
which gives a better convergence
rate than the basic Gauss–Seidel method. The well-known successive
over-relaxation (SOR) technique is based on this principle.
J
K
L
b
i
a
ii
D
E
F
−a
ij
a
ii
A
B
C
n
∑
j=i
D
E
F
−a
ij
a
ii
A
B
C
i−1
∑
j=1
G
H
I
b
i
a
ii
D
E
F
−a
ij
a
ii
A
B
C
n
∑
j=i
D
E
F
−a
ij
a
ii
A
B
C
i−1
∑
j=1
b
i
a
ii
a
ij
a
ii
1
4
2
4
3
ANIN_C07.qxd 29/12/2006 04:48PM Page 228
7.7 MULTIGRID TECHNIQUES 229
We have established in earlier chapters that the discretisation error reduces
with the mesh spacing. In other words, the finer the mesh, the better the
accuracy of a CFD simulation. Iterative techniques are preferred over direct
methods because their storage overheads are lower, which makes them more
attractive for the solution of large systems of equations arising from highly
refined meshes. Moreover, we have seen in Chapter 6 that the SIMPLE
algorithm for the coupling of continuity and momentum equations is itself
iterative. Hence, there is no need to obtain very accurate intermediate solu-
tions, as long as the iteration process eventually converges to the true
solution. Unfortunately, it transpires that the convergence rate of iterative
methods, such as the Jacobi and Gauss–Seidel, rapidly reduces as the
mesh is refined.
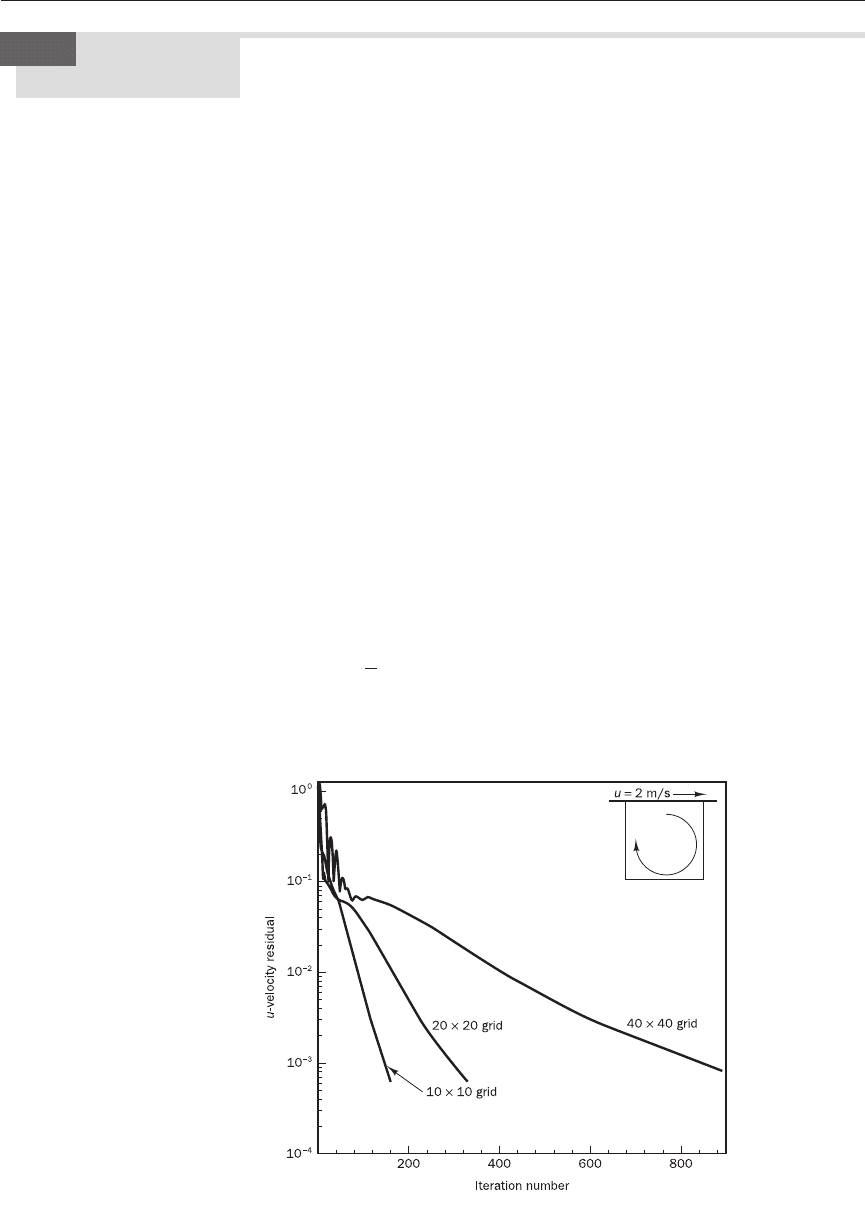
To examine the relationship between the convergence rate of an iterative
method and the number of grid cells in a problem we consider a simple
two-dimensional cavity-driven flow. The inset of Figure 7.5 shows that the
computational domain is a square cavity with a size of 1 cm × 1 cm. The lid
of the cavity is moving with a velocity of 2 m/s in the positive x-direction.
The fluid in the cavity is air and the flow is assumed to be laminar. We use a
line-by-line iterative solver to compute the solution on three different grids
with 10 × 10, 20 × 20 and 40 × 40 cells.
To obtain a measure of the closeness to the true solution of an intermedi-
ate solution in an iteration sequence we use the residual defined in (7.26) for
the ith equation. The average residual Ö over all n equations in the system
(i.e. an average over all the control volumes in the computational domain
of a flow problem) is a useful indicator of iterative convergence for a given
problem:
Ö =|r
i
| (7.30)
If the iteration process is convergent the average residual Ö should tend to
zero, since all contributing residuals r
i
→ 0 as k →∞. The average residual
n
∑
i=1
1
n
Multigrid
techniques
7.7
Figure 7.5 Residual reduction
pattern with a line-by-line
iterative solver using different
grid resolutions
ANIN_C07.qxd 29/12/2006 04:48PM Page 229
for a given solution parameter, e.g. the u-velocity component, is usually
normalised to make it easier to interpret its value from case to case and to
compare it with residuals relating to other solution parameters (e.g. v- or
w-velocity or pressure, which may each have very different magnitudes).
The most common normalisation is to consider the ratio of the average
residual after k iterations and its value at the first iteration:
R
(k)
norm
= (7.31)
In Figure 7.5 we have plotted the normalised residual of the u-momentum
equation against the iteration number. The solution is aborted when the
normalised residuals for all solution variables (velocity and pressure in this
case) fall below 10
−3
. We note that the 10 × 10 mesh solution converges in
161 iterations, whereas the 20 × 20 and 40 × 40 mesh solutions take 331 and
891 iterations to converge, respectively. Within the CFD code it is possible
to improve the convergence rate by adjusting solution parameters, including
relaxation parameters, but for the sake of consistency all solution parameters
were kept constant. The pattern of residual reduction is evident from the
diagram. After a rapid initial reduction of the residuals their rate of decrease
settles to a more modest final value. It is also clear that the final conver-
gence rate is lowest for the finest mesh. If we tried an even finer mesh,
it would take even longer to converge.
Multigrid concept
To simplify the explanation of the multigrid method we use matrix notation
and first revisit the definition of the residual. Consider the following system
of equations arising from the finite volume discretisation of a conservation
equation on a flow domain:
A.x= b (7.32)
The vector x is the true solution of system (7.32).
If we solve this system with an iterative method we obtain an intermediate
solution y after some unspecified number of iterations. This intermediate
solution does not satisfy (7.32) exactly and, as before, we define the residual
vector r as follows:
A.y= b − r (7.33)
We can also define an error vector e as the difference between the true solu-
tion and the intermediate solution:
e = x − y (7.34)
Subtracting (7.33) from (7.32) gives the following relationship between the
error vector and the residual vector:
A.e= r (7.35)
The residual vector can be easily calculated at any stage of the iteration pro-
cess by substituting the intermediate solution into (7.33). We can imagine
using an iterative process to solve system (7.35) and obtain the error vector.
For this it might be useful to write the system in the iteration matrix form:
e
(k)
= T.e
(k−1)
+ c (7.36a)
Ö
(k)
Ö
(1)
230 CHAPTER 7 SOLUTION OF DISCRETISED EQUATIONS
ANIN_C07.qxd 29/12/2006 04:48PM Page 230

7.7 MULTIGRID TECHNIQUES 231
Since the coefficient matrix A is the same for systems (7.32) and (7.35), the
coefficients T
ij
of the iteration matrix are equal to those of the chosen itera-
tion method, i.e. the Jacobi method or Gauss–Seidel method without or with
relaxation. The elements of the constant vector are, however, different:
c
i
= (7.36b)
In practice, if we tried to solve system (7.35) using the same iteration method
as we used for the original system (7.32) we would not find that this
made any difference in terms of convergence rate. However, system (7.35) is
important, because it shows how the error propagates from one iteration to
the next. Moreover, its equivalent (7.36) highlights the crucial role played by
the iteration matrix. As we saw earlier when we introduced the relaxation
technique, the properties of the iteration matrix determine the rate of error
propagation and, hence, the rate of convergence.
These properties have been extensively studied along with the math-
ematical behaviour of the error propagation as a function of the iterative
technique, mesh size, discretisation scheme etc. It has been established that
the solution error has components with a range of wavelengths that are
multiples of the mesh size. Iteration methods cause rapid reduction of error
components with short wavelengths up to a few multiples of the mesh size.
However, long-wavelength components of the error tend to decay very
slowly as the iteration count increases.
This error behaviour explains the observed trends in Figure 7.5. For the
coarse mesh, the longest possible wavelengths of error components (i.e. those
of the order of the domain size) are just within the short-wavelength range
of the mesh and, hence, all error components reduce rapidly. On the finer
meshes, however, the longest error wavelengths are progressively further
outside the short-wavelength range for which decay is rapid.
Multigrid methods are designed to exploit these inherent differences of
the error behaviour and use iterations on meshes of different size. The short-
wavelength errors are effectively reduced on the finest meshes, whereas the
long-wavelength errors decrease rapidly on the coarsest meshes. Moreover,
the computational cost of iterations is larger on finer meshes than on coarse
meshes, so the extra cost due to iterations on the coarse meshes is offset by
the benefit of much improved convergence rate.
7.7.1 An outline of a multigrid procedure
We now give a short description of the principles of a two-stage multigrid
procedure:
Step 1: Fine grid iterations. Perform iterations on the finest grid with mesh
spacing h to generate an intermediate solution y
h
to system A
h
. x = b with
true solution vector x. The number of iterations is chosen sufficiently large
that the short-wavelength oscillatory component of the error is effectively
reduced, but no attempt is made to eliminate the long-wavelength error
component. The residual vector r
h
for the solution on this mesh satisfies
r
h
= b − A
h
. y
h
(see equation (7.33)) and the error vector e
h
is given by
e
h
= x − y
h
(see equation (7.34)). We have also established that the error and
residual are related as follows: A
h
. e
h
= r
h
(see equation (7.35)).
r
i
a
ii
ANIN_C07.qxd 29/12/2006 04:48PM Page 231
Step 2: Restriction. The solution is transferred from the fine mesh with spac-
ing h onto a coarse mesh with spacing ch, where c > 1. Due to the larger mesh
spacing of the coarse mesh the long-wavelength error (on the fine mesh)
appears as a short-wavelength error on the new mesh and will reduce rapidly.
The process of transferring can be simplified if we use a coarse mesh with
twice the mesh spacing of the fine mesh. Instead of solving for the solution
vector y
ch
we work with the error equation A
ch
. e
ch
= r
ch
on the coarse mesh
starting with an initial guess of e
ch
= 0. To perform the solution process we
need values of the residual vector and the matrix of coefficients. Given the
values of r
h
on the fine mesh we must use a suitable averaging procedure to
find the residual vector r
ch
on the coarse mesh. The coefficients of matrix A
ch
can be recomputed from scratch on the coarser mesh or evaluated from the
fine mesh coefficient matrix A
h
using some form of averaging or interpola-
tion technique. The cost per iteration on the coarser mesh is small, so we
can afford to perform an adequate number of iterations to get a converged
solution of the error vector e
ch
.
Step 3: Prolongation. After obtaining the converged solution of error vector
e
ch
for the coarse mesh we need to transfer it back to the fine mesh, but note
that we have fewer data than points in the fine mesh. We use a convenient
interpolation operator (e.g. linear interpolation) to generate values for the
prolonged error vector e′
h
at intermediate points in the fine mesh.
Step 4: Correction and final iterations. Once we have calculated the prolonged
error vector e′
h
we may correct the intermediate fine grid solution: y
improved
=
y
h
+ e′
h
. Because the long-wavelength error has been eliminated, this
improved solution is closer to the true solution vector x. However, several
approximations were made, so we perform a few more iterations with the
improved solution to iron out any errors that may have been introduced
during restriction and prolongation.
The above description is for the two-stage procedure (one fine mesh, one
coarse mesh). In practice, however, the restriction is carried out into a
number of increasingly coarse levels. Then prolongation procedures are also
performed at each stage back to the starting mesh.
7.7.2 An illustrative example
Consider solving a one-dimensional conduction equation for an insulated
metal rod which has internal heat generation. The governing equation is
k + g = 0
The dimensions and other data are as follows: length of the rod is 1 m, cross-
sectional area of the rod is 0.01 m
2
, thermal conductivity k = 5 W/m.K,
generation g = 20 kW/m
3
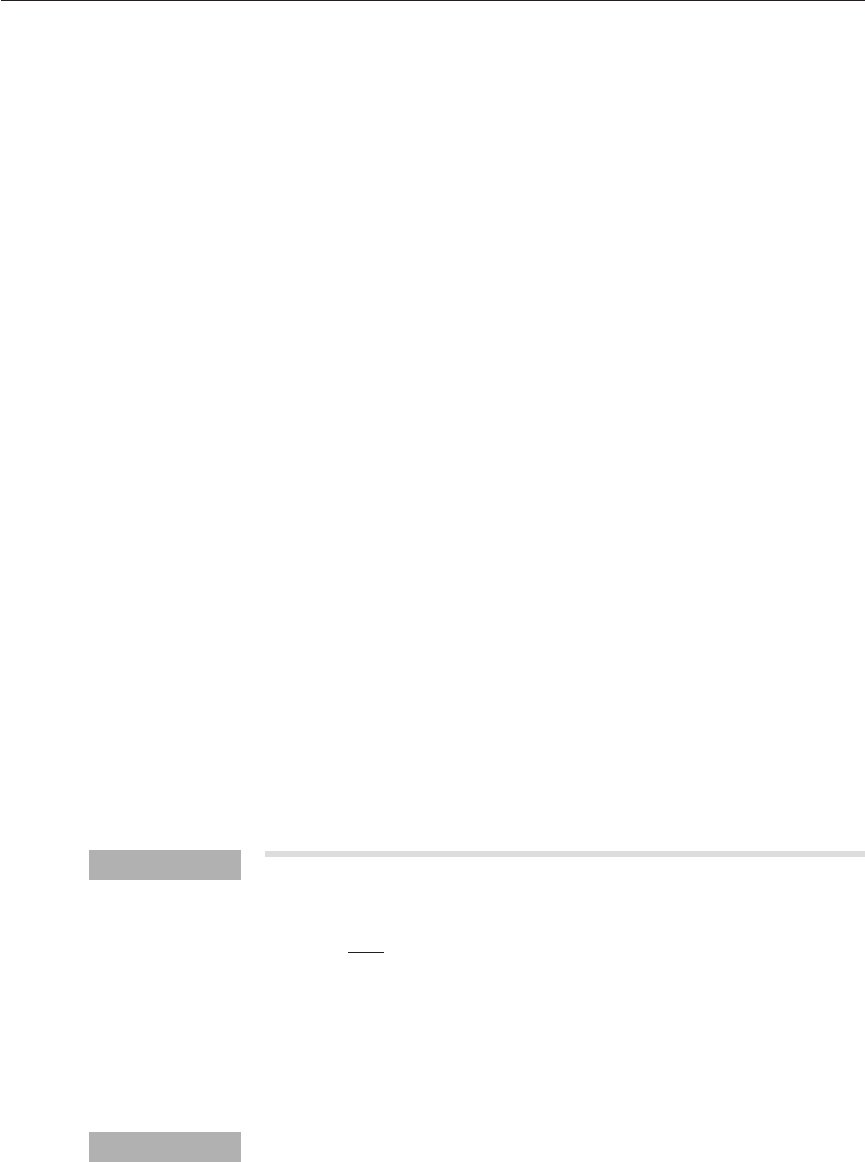
, the ends are at 100°C and 500°C. We are inter-
ested in obtaining a solution, say, using a grid of 20 cells giving a spacing of
∆x = 0.05 m, which we name Grid 1.
Figure 7.6 shows Grid 1 along with the boundary conditions marked at
each end. It is not necessary here to describe how discretisation equations
d
2
T
dx
2
232 CHAPTER 7 SOLUTION OF DISCRETISED EQUATIONS
Example 7.5
Solution
ANIN_C07.qxd 29/12/2006 04:48PM Page 232
7.7 MULTIGRID TECHNIQUES 233
Figure 7.6 The 20 node grids
used to solve the problem –
Grid 1
We use the expressions in Table 7.12 to compile the numerical values
of coefficients in Table 7.13 and to construct the matrix equation A.x= b,
where solution vector x contains the temperatures at the nodes of Grid 1.
Table 7.12 Coefficients of the discretisation equation at each point
Node a
W
a
E
S
u
S
p
a
P
1 (first node) 0 qA
δ
x + T
A
− a
W
+ a
E
− S
p
2, 3,..., 19
(internal nodes)
qA
δ
x 0.0 a
W
+ a
E
− S
p
20 (last node) 0 qA
δ
x + T
B
− a
W
+ a
E
− S
p
2kA
δ
x
2kA
δ
x
kA
δ
x
kA
δ
x
kA
δ
x
2kA
δ
x
2kA
δ
x
kA
δ
x
Table 7.13 Numerical values of the coefficients of the discretisation equation
Node a
W
a
E
S
u
S
p
a
P
1 0 1.0 210 −2.0 3.0
2, 3,..., 19 1.0 1.0 10 0.0 2.0
20 1.0 0 1010 −2.0 3.0
are obtained for this problem; the procedure is similar to Example 4.2.
Table 7.12 gives a summary of coefficients of the discretisation equations at
nodes 1, 2, 3, ..., 20.
The matrix equation is
G 3.0 −1.0 0 . . . 0 JGx
1
JG210J
H−1.0 2.0 −1.0 . . . 0 KHx
2
KH10K
H 0 −1.0 2.0 −1.0 . . 0 KHx
3
KH10K
H .......KH.
.
K = H .
.
K (7.37)
H .......KH. KH. K
H ....−1.0 2.0 −1.0KHx
19
KH10K
I .....−1.0 3.0LIx
20
LI1010L
The matrix of coefficients is tri-diagonal, so we can use the TDMA to obtain
a solution in a single pass. The result is given in Table 7.14 to enable later
verification of the multigrid solution.
ANIN_C07.qxd 29/12/2006 04:48PM Page 233

Step 1: Fine grid iterations
We use the Gauss–Seidel iteration (7.20) to solve these equations. We
simply initialise the temperature to 150°C everywhere as an initial guess to
start the iterative process (a field closer to the final solution will not highlight
the benefit of the method). The solution vector y
h
after five Gauss–Seidel
iterations is shown below:
Gy
1
JG116.755J
Hy
2
KH141.994K
Hy
3
KH160.427K
H . K
=
H . K
(7.38)
H . KH. K
H . KH. K
Hy
19
KH394.392K
Iy
20
LI468.130L
The residual vector r
h
= b − A
h
. y
h
at this stage is
Gr
1
h
JG210JG3.0 −1.0 0 . . . 0 JGy
1
JG1.728J
Hr
2
h
KH10KH−1.0 2.0 −1.0 . . . 0 KHy
2
KH3.193K
Hr
3
h
KH10KH0 −1.0 2.0 −1.0 . . 0 KHy
3
KH4.658K
r
h
=
H . K
=
H . K
−
H .......KH. K
=
H . K
H . KH. KH.......KH. KH. K
H . KH. KH.......KH. KH. K
Hr
19
h
KH10KH.. ..−1.0 2.0 −1.0KHy
19
KH7.461K
Ir
20
h
LI1010LI.....−1.0 3.0LIy
20
LI0.000L
The total r.m.s. residual value is 14.951. If the iteration process is continued
the residual vector will reduce slowly until the convergence criterion is
achieved. Figure 7.9 at the end of this section shows the pattern of conver-
gence for the Gauss–Seidel iteration. Using a sum of r.m.s. residuals less
than 10
−6
as the convergence criterion, the final solution is achieved after 664
iterations. The converged solution is of course indistinguishable from the
TDMA solution in Table 7.14.
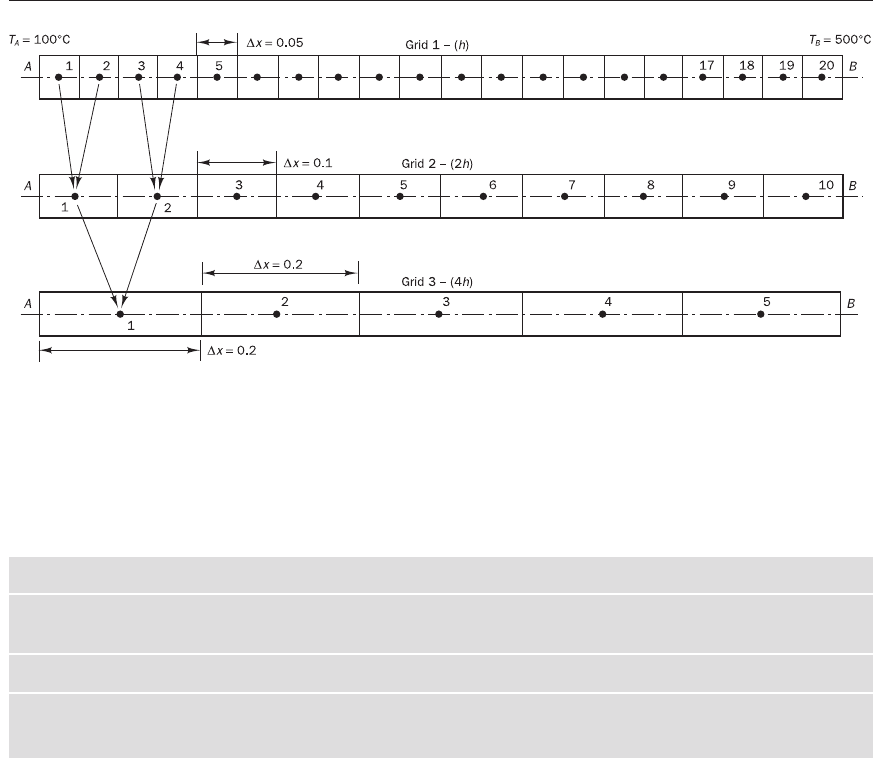
Step 2: Restriction
To apply the multigrid method we have to construct a coarse grid first. The
simplest method is to construct a grid which has half the number of cells.
Figure 7.7 shows the fine mesh and the proposed coarse meshes drawn one
beneath the other. The first coarse mesh uses 10 cells with a spacing of 0.1 m
and is named Grid 2. The next coarse mesh – Grid 3 – consists of 5 cells with
a spacing of 0.2 m.
If the fine grid mesh spacing is h, a mesh using half the number of
cells would have a mesh spacing of 2h. In the multigrid literature the mesh
spacing is indicated by means of superscripts. In this notation the residual
vector we have on the fine mesh is r
h
.
234 CHAPTER 7 SOLUTION OF DISCRETISED EQUATIONS
Table 7.14 The TDMA solution
Grid 1 – Temperature at nodes
1 2 3 4 5 6 7 8 9 1011121314151617181920
160 270 370 460 540 610 670 720 760 790 810 820 820 810 790 760 720 670 610 540
ANIN_C07.qxd 29/12/2006 04:48PM Page 234
7.7 MULTIGRID TECHNIQUES 235
Figure 7.7 Grids used to solve
the problem
Table 7.15 Fine mesh and coarse mesh residuals showing restriction process of transfer from fine Grid 1 to coarse Grid 2
Fine mesh (Grid 1) residuals – (r
h
)
1 2 3 4 5 67891011121314151617 18 19 20
1.728 3.193 4.658 5.976 7.075 . . . . .......33.962 22.385 7.461 0.000
Coarse mesh (Grid 2) residuals – after restriction (r
2h
)
123456789 10
2.460 5.317 7.506 . . . . . 28.173 3.731
In matrix form the Grid 2 residual vector after ‘restriction’ is
Gr
1
2h
JG2.460J
Hr
2
2h
KH5.317K
Hr
3
2h
KH7.506K
r
2h
=
H . K
=
H . K
H . KH. K
H . KH. K
Hr
9
2h
KH28.173K
Ir
10
2h
LI3.730L
Note that we have only 10 values now. The error in the coarse mesh satisfies
the equation A
2h
. e
2h
= r
2h
. We have calculated the vector r
2h
, but we also
need the matrix A
2h
to solve this equation to obtain e
2h
. In the multigrid
literature there are numerous techniques which use elegant interpolation
operators to evaluate A
2h
. For this example problem we do not interpolate
the coefficient matrix, but calculate the coefficients of the coarse grid matrix
exactly using the expressions in Table 7.12. Thus, we obtain the following
matrix equation for the error vector e
2h
:
Now we need to interpolate the residual vector from a fine grid to a coarse
grid. Since the nodes of Grid 2 are exactly mid-way between those of Grid 1
we can interpolate by simple averaging of r
h
to obtain the residual vector r
2h
for the coarse grid. The values are summarised in Table 7.15. Note that only
3 decimal places of the actual numbers are shown in the table. As mentioned
earlier, this transfer process is known as ‘restriction’.
ANIN_C07.qxd 29/12/2006 04:48PM Page 235
G 1.5 −0.5 0 . . . 0JGe
1
2h
JG2.460J
H−0.5 1.0 −0.5 0 . . 0KHe
2
2h
KH5.317K
H 0 −0.5 1.0 −0.5 . . 0KHe
3
2h
KH7.506K
H .......KH . K
=
H . K
(7.39)
H .......KH . KH. K
H .......KH . KH. K
H ....−0.5 1.0 −0.5KHe
9
2h
KH28.173K
I .....−0.5 1.5LIe
10
2h
LI3.730L
We now solve system (7.39) with an initial guess of e
2h
= (0, 0, 0, ..., 0)
using the Gauss–Seidel iteration procedure. Since the iterations are now
on a coarser mesh, the rate of residual reduction is faster and the cost per
iteration is much lower. After 10 iterations on this coarse mesh we obtain the
error vector e
2h
on the first coarse mesh (Grid 2) as
Ge
1
2h
JG19.156J
He
2
2h
KH58.310K
He
3
2h
KH96.049K
H . K
=
H . K
(7.40)
H . KH . K
H . KH . K
He
9
2h
KH158.591K
Ie
10
2h
LI55.351L
Since we have only performed 10 iterations this solution is partially converged
and there will be a residual: <
2h
= r
2h
at start
− A
2h
. e
2h
. Its values are given in
Table 7.16 along with interpolated Grid 3 residuals r
4h
after restriction.
236 CHAPTER 7 SOLUTION OF DISCRETISED EQUATIONS
Table 7.16 Residuals on Grid 2 and restricted residuals on Grid 3
Coarse mesh (Grid 2) residuals >
2h
1 2 3 456789 10
2.881 4.609 5.929 .....0.91920.000
Coarse mesh (Grid 3) residuals r
4h
– after restriction
12345
3.745 6.277 6.204 3.615 0.459
Now the residuals <
2h
have been transferred to an even coarser grid with
five nodes (see Figure 7.7) to yield residual r
4h
. Then we solve for the error
e
4h
on Grid 3 using the system of equations A
4h
. e
4h
= r
4h
, where the co-
efficients of A
4h
are again calculated from scratch using the expressions in
Table 7.12. As the cost per iteration is very low we can afford to do more
iterations on Grid 3 to achieve very effective error reduction. After 10 itera-
tions we get the solution in Table 7.17 for error vector e
4h
.
Table 7.17
Grid 3 – solution (error vector e
4h
on Grid 3)
12345
23.408 55.831 63.731 47.205 16.348
This coarsening procedure could be continued, but in this illustrative
example we stop the process of restriction at the five-node grid.
ANIN_C07.qxd 29/12/2006 04:48PM Page 236