Власов К.П. Теория автоматического управления
Подождите немного. Документ загружается.


243
{}
∫
∞
∞−
ω−
=ω= dttfjFtf
tj
e)()()(Ф .
где
Ф - оператор прямого преобразования Фурье.
Тогда уравнение (1.34) преобразованное по Фурье при нулевых начальных услови-
ях запишется в виде
)())()((
1
1
10
ωωωω
jYajajaja
nn
nn
++++
−
−
K
)())()((
1
1
10
ω+ω++ω+ω=
−
−
jXbjbjbjb
mm
mm
K
.
Обозначив полиномы, стоящие в скобках правой и левой частей полученного урав-
нения,
()
ω
jA и
)(
ω
jB
соответственно, получим
)()()()(
ω
ω
ω
ω
jXjAjYjB
=
, откуда
)(
)(
)(
)(
)(
ω=
ω
ω
=
ω
ω
jW
jA
jB
jX
jY
. (1.35)
Выражение (1.35) представляет собой
частотную функцию или амплитудно-фазо-
частотную характеристику системы (АФЧХ), которую можно записать в виде
)(arg
e)()(
ω
ω=ω
jWj
jWjW , (1,36)
где
|W(jω)| = A(ω) – амплитудно-частотная характеристика системы (АЧХ), а
arg
W(jω) = ϕ(ω) – фазо-частотная характеристика системы (ФЧХ).
Частотная функция системы (1.35) может быть представлена и в алгебраическом
виде:
W(jω) = A(ω)e
jϕ(ω)
= P(ω) + jQ(ω),
где
.
)(
)(
arctg)(arg)(;)()()()(
22
ω
ω
ωωϕωωωω
P
Q
iWQPiWA ==+==
В данном случае
P(ω) называют вещественной частотной характеристикой, а
Q(ω) – мнимой частотной характеристикой.
В некоторых случаях при анализе и синтезе АСУ используется логарифмическая
частотная характеристика
*)
вида:
logW(jω) = logA(ω) + jϕ(ω)loge,
где log ( )
A
ω
- логарифмическая амплитудно–частотная характеристика (ЛАХ),
loge = 0,434.
В случае подачи на вход системы гармонического сигнала
x = asinωt, который с
учетом того, что
tjte
tj
ωω
ω
sincos += , можно записать в виде
*)
Более подробно логарифмические частотные характеристики рассмотрены в параграфе 4.6.

244
)](*Im)([e)(* txtxatx
tj
==
ω
, частное решение уравнения (1.34) отыскивается в том же ви-
де, что и входной сигнал
x(t): y(t) = A
0
sin(
ω
t +
ϕ
) или y*(t) = A
0
e
j(
ϕ
+
ω
t)
.
Подставив
x*(t) и y*(t) в уравнение (1.34) и сократив его на e
j
ω
t
, окончательно по-
лучим
A(j
ω
)A
0
e
j
ϕ
= B(j
ω
)a, откуда:
)(
)(
)(
e
0
ω
ω
ω
ϕ
jW
jA
jB
a
A
j
==
. (1.37)
Из сопоставления уравнения (1.36) с уравнением (1.37) при
ω
= const получим
ϕ=ω=ω )(arg;)(
0
jW
a
A
jW
.
Если
ω – переменная величина, то величина A
0
будет функцией частоты, тогда
)(/)(
0
ω
ω
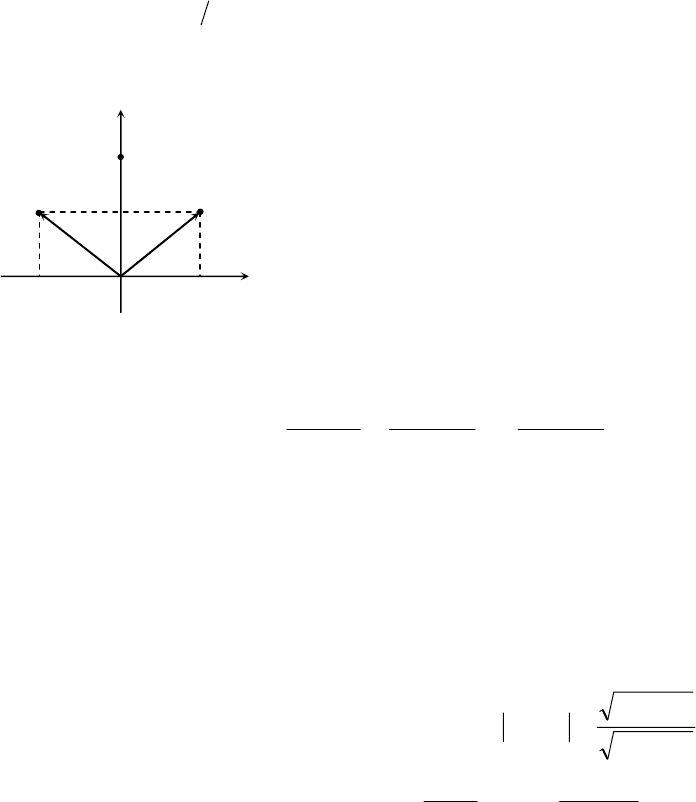
AaA = . Таким образом, амплитудно-частотная характеристика )(
ω
А харак-
теризует усиление периодического сигнала на различных частотах (рис.1.9, а). Как видно
из рисунка в системе могут отсутствовать (кривая 1) или
возникать резонансные колебания (кривая 2,
ω
р
– частота
резонанса). Фазо-частотная характеристика )(
ω
ϕ
, харак-
теризующая сдвиг фаз между входным
х(t) и выходным
y(t) сигналами, представлена на рис. 1.9, б. Из рисунка
видно, что с ростом частоты
ω запаздывание выходной
координаты
у(t) относительно входной х(t) увеличивается.
1
Геометрическое место концов вектора частотной
функции
W(j
ω
) на комплексной плоскости при изменении
частоты от нуля до бесконечности называется годографом
вектора
W(jω) (рис.1.9, в).
Заметим, что в общем случае для нахождения
функции действительного переменного
t при известной
функции
Y(jω) необходимо воспользоваться обратным
преобразованием Фурье:
{}
∫
∞
∞−
ω−
ωω
π
=ω= djYjYty
tj
e)(
2
1
)(Ф)(
1
.
1.4.1. Условия однозначной связи между частотными характеристиками
Из соотношения W(jω) = A(
ω
)e
jϕ(ω)
= P(
ω
) + jQ(
ω
) следует, что частотная характе-
ристика полностью определена, если задана любая из пар:
A(
ω
) и
ϕ
(
ω
) или P(
ω
) и Q(
ω
).
245
Однако при определенных условиях существует однозначная связь между A(
ω
) и
ϕ
(
ω
),
а также
P(
ω
) и Q(
ω
). Это позволяет упростить исследования систем, ограничиваясь, на-
пример, рассмотрением только
A(
ω
) или P(
ω
). В теории интегралов Фурье доказывается,
что условие существования однозначной связи заключается в том, чтобы частотная функ-
ция
)()()(
ω
ω
ω
jAjBjW = не имела ни нулей, ни полюсов в нижней полуплоскости кор-
ней полиномов числителя и знаменателя (нули – корни полинома
B(j
ω
) = 0, следовательно,
при этом
W(j
ω
) = 0, а полюса – корни полинома A(j
ω
) = 0, сле-
довательно,
W(j
ω
) = ∞).
Системы, которые удовлетворяют этим условиям, назы-
ваются
минимально- фазовыми (рис.1.10). Из всех возможных
систем с одной и той же АЧХ они дают наименьший сдвиг фаз
ϕ
при любой частоте
ω
.
Пример1.7. Пусть динамические звенья имеют следующие передаточные функ-
ции
W
1
(j
ω
) = 1 и
2222
22
2
2
)(
a
a
j
a
a
aj
aj
jW
+
+
+
−
=
+
−
=
ω
ω
ω
ω
ω
ω
ω
, где a = const.
Поскольку корень числителя
W
2
(j
ω
) лежит в нижней полуплоскости (
ω
1
= –ja),
второе звено принадлежит к классу неминально-фазовых, что свидетельствует о неодно-
значности связи между амплитудно- и фазо-частотными характеристиками этого звена.
Убедимся в справедливости сказанного, определив АЧХ и ФЧХ для каждого из
звеньев. Имеем:
A
1
(
ω
) = 1;
ϕ
1
(
ω
)=0, ;1)()(
22
22
22
=
+
+
==
a
a
WA
ω
ω
ωω
.
2
)(
)(
)(
22
2
a
a
arctg
P
Q
arctg
−
==
ω
ω
ω
ω
ωϕ
Анализ полученных частотных характеристик показывает, что при одинаковых ам-
плитудно-частотных характеристиках звеньев их фазо-частотные характеристики различ-
ны: в то время как
ϕ
1
(
ω
)=0 при любых
ω
,
ϕ
2
(
ω
) отлична от нуля при
ω
0≠ . Следовательно,
связь между
A
2
(
ω
) и
ϕ
2
(
ω
) неоднозначна и эти характеристики необходимо рассматривать
совместно.
1.5. СВЯЗЬ МЕЖДУ ОПЕРАТОРАМИ ПРЕОБРАЗОВАНИЯ СИГНАЛОВ ЛИНЕЙ-
НОЙ СИСТЕМОЙ
Как было сказано ранее, оператором преобразования А называется математическое
выражение, связывающее входную и выходную величины системы, т.е.
y = A{x} (рис. 1.3).
+j
+
α
j
ω
–α
Р

246
Основным оператором линейной системы является линейное дифференциальное
уравнение, которое позволяет получить любые другие формы операторов преобразования.
Например, пусть система управления описывается ДУ первого порядка
xbyaya
010
=
+
&
. (1.38)
Преобразовав уравнение (1.18) по Лапласу при нулевых начальных условиях, най-
дем передаточную функцию, которая также является оператором преобразования. Имеем
{}{}
xbLyayaL
010
=+
&
или )()()(
010
pXbpYapa
=
+
, откуда
10
0
)(
)(
)(
apa
b
pX
pY
pW
+
==
. (1.39)
Преобразовав уравнение (1.38) по Фурье, можно получить частотную функцию
системы:
10
0
)(
)(
)(
aja
b
jX
jY
jW
+
==
ωω
ω
ω
. (1.40)
Сопоставив (1.39) и (1.40), найдем связь между
)(
ω
jW
и W(p):
ω
ω
jp
pWjW
=
= )()( . (1.41)
Решив ДУ (1.38) при типовом единичном ступенчатом возмущении x(t) = 1(t) и ну-
левых начальных условиях, получим переходную функцию h(t):
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−==
−
=
t
a
a
ttx
a
b
thty
0
1
e1)()(
1
0
)(1)(
.
Воспользовавшись (1.39) и учтя, что при x(t)=1(t) имеем
ptL /1)}(1{ = и Y(p)=H(p),
получим:
p
pW
pXpWpH
)(
)()()( ==
,
тогда
⎭
⎬
⎫
⎩
⎨
⎧
=
−
p
pW
Lth
)(
)(
1
. (1.42)
Таким образом, выражение (1.42) связывает передаточную функцию с переходной
функцией. При этом W(p) = pL{h(t)} = pH(p).
Весовую функцию w(t) находим с учетом того, что входной сигнал
x(t) = δ(t) = 1′(t). Так как w(t) = h′(t), то
t
a
a
abtw
0
1
e)/()(
00
−
=
.
247
Воспользовавшись (1.39) и учтя, что L{
δ
(t)} = 1, получим: Y(p) = W(p) = L{w(t)},
откуда
w(t) = L
-1
{W(p)} (1.43)
Таким образом, соотношения (1.38) – (1.43) позволяют найти любой оператор пре-
образования сигналов линейной системы [ДУ, W(p); W(j
ω
), h(t), )(t
ω
], если известен хотя
бы один из них.
2. ТИПОВЫЕ ЗВЕНЬЯ И СТРУКТУРНЫЕ СХЕМЫ АСУ
2.1. ТИПОВЫЕ ДИНАМИЧЕСКИЕ ЗВЕНЬЯ
Современные АСУ состоят из элементов различной физической природы, конст-
руктивного исполнения, источников энергии и т.д. Однако динамические свойства этих
элементов часто можно описать одним и тем же ДУ. Положив в основу классификации
динамические свойства, обычно выделяют следующие звенья: усилительное, инерцион-
ные, колебательное, интегрирующее, дифференцирующее.
1. Усилительное звено. Оператор преобразования равен
k: y = kx.
2. Инерционные (апериодические) звенья первого порядка, описывается ДУ вида:
kxyyT =+
&
; второго порядка –
kxyyTyT =++
&&&
ξ2
2
при ξ > 1.
3. Колебательное звено. Описывается ДУ такого же вида как инерционное звено
второго порядка, но при 0 < ξ < 1.
В статическом режиме (при равенстве нулю всех производных) все приведенные
звенья имеют уравнение, аналогичное усилительному звену, что свидетельствует о нали-
чии линейной связи между входной величиной x и выходной величиной y в
статике. По-
этому все рассмотренные звенья относятся к классу статических.
4. Интегрирующее звено. Описывается выражением
∫
=
t
xdtky
0
, или kxy
=
&
.
Здесь выходная величина y будет изменяться до тех пор, пока входная величина не станет
равной нулю.
5. Дифференцирующее звено –
dtkdxxky /
=
=
&
.
Последние два звена не имеют связи между входными и выходными величинами
в статике, поэтому относятся к классу астатических.
Реальные звенья могут описываться уравнением и выше второго порядка, но фор-
мально это описание можно заменить системой уравнений, каждое из которых имеет по-

248
рядок не выше второго, и таким образом, представить реальное звено в виде звеньев 1-5.
Поэтому эти звенья обычно называются типовыми.
Предполагается, что все звенья являются звеньями направленного действия (т.е.
выходная величина не оказывает влияния на входную). Каждое звено характеризуется
уравнением движения (динамики), передаточными и частотными функциями, временны-
ми характеристиками.
2.1.1. Усилительное звено
Усилительное или безинерционное звено описывается следующими операторами
преобразования:
•
уравнением связи между выходной x и входной y величинами: y = kx или после преоб-
разования по Лапласу получим
Y(p) = kX(p).
•
передаточной функцией:
k
pX
pY
pW ==
)(
)(
)(
;
•
частотными характеристиками:
амплитудно-фазо-частотная характеристика (АФЧХ) – W(jω) = k;
амплитудно-частотная-характеристика (АЧХ) – A(ω) = k;
фазо-частотная характеристика (ФЧХ) – ϕ(ω) = 0 (рис.1.11, а, б, в);
•
временными характеристиками: переходной функцией kth
ttx
=
= )(1)(
)( (рис.1.11, г);
функцией веса w(t) = h′(t) = kδ(t).
2.1.2. Апериодическое звено первого порядка
Это звено относится к классу инерционных и имеет следующие операторы преобразова-
ния:
•
уравнение динамики:
хbyaya
010
=
+
&
, которое обычно записывают в виде:
kxyyT =+
&
После преобразования по Лапласу уравнения динамики примет вид:
)()()1( pkXpYTp
=
+
,
где Т=а
0
/а
1
– постоянная времени; k=
0
b /a
1
– коэффициент передачи;
•
передаточная функция:
1)(
)(
)(
+
==
Tp
k
pX
pY
pW
;
Рис.1.11
k
A
(
ω
)
ω
б
ϕ
(
ω
)
ω
в
k
t
y
= h
(
t
)
г
+
j
k
а
+

249
•
частотные характеристики:
АФЧХ -
)()(
111
)(
2222
ωω
ω
ω
ωω
ω
jQP
T
kT
j
T
k
Tj
k
jW +=
+
−
+
=
+
=
,
где )(
ω
P ,)(
ω
Q - вещественная и мнимая частотные характеристики.
На комплексной плоскости W(jω) годограф АФЧХ представляет собой уравнение окруж-
ности с радиусом, смещенным по оси абсцисс на k/2 (рис.1.12, а):
4
)(
2
)(
2
2
2
k
Q
k
P =+
⎟
⎠
⎞
⎜
⎝
⎛
−
ωω
;
АЧХ -
1
)()(
22
+
==
ω
ωω
T
k
jWA
, (рис1.12,б);
ФЧХ -
)arctg(
)(
)(
arctg)( T
P
Q
ω
ω
ω
ωϕ
−==
, (рис.1.12 в);
•
временные характеристики:
переходная функция - h(t) = k(1-e
–t / T
), (рис.1.12, г);
функция веса -
Tt
Tkthtw
/
e)/()()(
−
=′=
, (рис.1.12, д).
Заметим, что некоторые объекты управления
характеризуются показателями, которые
являются функциями не только времени, но и пре-
образованных координат, и описываются уравне-
ниями в частных производных. Такие объекты
встречаются в различных тепловых, диффузионных и электромагнитных устройствах. В
этом случае зависимость переменных может носить степенной характер и в дифференци-
альном
уравнении может появиться слагаемое, содержащее переменную (временную или
пространственную) в дробной степени. Например, если f(t) = t
α
, где 1 > α > –1, но α ≠ 0, то
изображение этой функции будет
ΘΘ=
ΘΘ
==
Θ−
∞
+
∞
Θ−
∞
−
∫∫∫
d
p
p
d
p
dtttL
pt
e
1
ee}{
0
1
00
α
αα
α
αα
(1.44)
Здесь произведена замена переменных pt = Θ, и учтено, что
pddt /Θ=
и
pt /
Θ
=
.
Интеграл в выражении (1.44) является функцией α. В частности, можно показать, что
при α = –1/2 он равен
π, при α = 1/2 равен
2/π
, а при α = 1 равен 1. Тогда, воспользовав-
шись (1.44), получим
1
2
0,5 1
{}Lt
p
p
π
π
−
−+
==
;
1
2
0,5 1
{}
2
2
Lt
p
p
p
π
π
+
==
;
2
1
}{
p
tL =

250
Таким образом, ДУ, содержащее слагаемое в дроб-
ной степени, после преобразования по Лапласу может со-
держать
p
. Тогда передаточная функция примет вид:
)(
)(
pA
k
pW =
Передаточная функция вида (1.45) называется ир-
рациональной. В частности, при А(
p
)=Т
p
+1, получим
W(p) =
1+pT
k
.
Звено с такой передаточной функцией иногда называют – полуинерционным.
При этом Y(p) = W(p)X(p) и изображение переходной функции будет
Н(р)
)/1)](1/([ ppTk +=
. Произведя замену переменных
sp =
, найдем псевдоизображе-
ние H(s) = k/(Ts + 1)s
2
, которое дает возможность найти оригинал h(t).
На рис.1.13 для сравнения приведены переходные функции инерционного (кривая 1) и по-
луинерционного (кривая 2) звеньев.
2.1.3. Апериодическое звено второго порядка
Это звено также относится к классу инерционных с монотонным переходным про-
цессом. В отличие от инерционного звена первого порядка оно включает в себя две энер-
гетические или массовые емкости и имеет следующие операторы преобразования:
•
уравнение динамики
kxyyTyT =+ξ+
&&&
2
2
(при ξ > 1) или, преобразовав его по Лапласу,
имеем
)()()1ξ2(
22
pkXpYpTpT =++ , (1.46)
Характеристическое уравнение звена имеет вид:
01ξ2
22
=++ pTpT
, (1.47)
корни которого вещественные и отрицательные:
T
p
1
2
2,1
−±−
=
ξξ
.
Разложив правую часть (1.47) на множители характеристическое уравнение звена
можно записать в виде:
0)1)(1(
21
=
+
+ pTpT
, (1.48)
с корнями р
1
=-1/Т
1
; р
2
=-1/Т
2
.
Сравнив (1.47) и (1.48) получим: Т
2
=Т
1
Т
2
; 2ξТ=Т
1
+Т
2
следовательно, при известных Т
и ξ можно найти Т
1
и Т
2
и наоборот.
•
передаточная функция
k
h(t)
t
2
1
Рис.1.13

251
)1(
1
)1(
1ξ2
)(
)(
)(
21
22
+
⋅
+
=
++
==
pTpT
k
pTpT
k
pX
pY
pW
,
Таким образом, апериодическое звено второго порядка можно представить в виде двух
звеньев первого порядка.
•
частотные характеристики:
АФЧХ-
−
ω+ω−
ω−
=
ω+ω−
=ω
2222
22
22
)ξ2()1(
)1(
ξ2)1(
)(
TT
Tk
TjT
k
jW
=
+−
2222
)ξ2()1(
ξ2
ωω
ω
TT
kT
j
)()(
ω
ω
jQP += , (рис.1.14а);
Заметим, что при
T/1=
ω
,
ω
2
T
2
= 1 и P(
ω
) = 0;
АЧХ
-
2222
)ξ2()1(
)(
ωω
ω
TT
k
A
+−
=
, (рис.1.14, б);
ФЧХ -
⎟
⎠
⎞
⎜
⎝
⎛
−
−
=
22
1
ξ2
arctg)(
ω
ω
ωϕ
T
T
, (рис 1.14, в);
•
временные характеристики:
переходная функция –
kCCth
tptp
++=
2
2
1
1
ee)(
(рис.1.14, г);
весовая функция –
tptp
epCepCtw
11
2211
)( +=
(рис.1.14, д).
Постоянные C
1
и C
2
находят из начальных
условий h(0) = h′(0) = 0. Окончательно получим
⎟
⎟
⎟
⎠
⎞
⎜
⎜
⎜
⎝
⎛
−
+
−
−=
−−
2
21
2
1
21
1
ee1)(
T
t
T
t
TT
T
TT
T
kth
;
⎟
⎟
⎟
⎠
⎞
⎜
⎜
⎜
⎝
⎛
−
−
=
−−
21
21
ee)(
T
t
T
t
TT
k
tw
2.1.4. Колебательное звено
Колебательное звено отличается от предыдущего тем, что переходный процесс но-
сит не монотонный, а колебательный характер. Это обусловлено взаимным обменом энер-
гии (массы) между соответствующими емкостями. Примером может служить обмен маг-
нитной и электрической энергией в цепи RLC при определенных значениях ее парамет-
ров.
Уравнение динамики этого звена и характеристическое уравнение аналогично
уравнениям (1.46) и (1.47), но при 0 < ξ < 1. При этом корни характеристического уравне-
ния будут комплексные сопряженные с отрицательной вещественной частью:
;
1
2
2,1
ωα
ξξ
j
T
p ±−=
−±−
=
TT
2
1
;
ξ
ω
ξ
α
−
== .
252
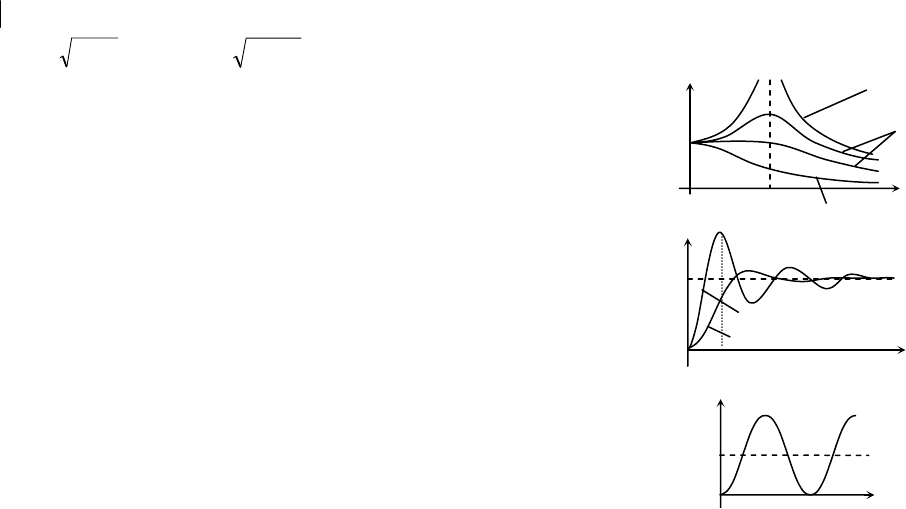
В данном случае звено второго порядка физически нельзя разделить на более про-
стые.
Передаточная функция и частотные характеристики описываются теми же выраже-
ниями, что и в предыдущем случае. При этом амплитудно-частотная характеристика мо-
жет увеличиваться до определенной (резонансной) частоты ω
р
, а затем снова уменьшаться
(рис.1.15, а).
Переходная функция (рис. 1.15,б) при комплексных корнях характеристического
уравнения (1.47) имеет вид:
)]sin(e1[)(
ϕω
α
+−=
−
tAkth
t
,
где
;1/1
2
ξ−=A
2
1arcsin
ξϕ
−=
– постоянные интегрирова-
ния, определяемые из нулевых начальных условий.
Из изложенного вытекает, что коэффициент ξ опреде-
ляет характер переходного процесса для звена второго поряд-
ка. Чем больше этот коэффициент, тем меньше склонность
звена к колебаниям. При ξ > 1 колебания отсутствуют. Поэто-
му коэффициент ξ называют коэффициентом демпфирования
(успокоителя колебаний).
При ξ = 0
имеем 0
2
=+ yyT
&&
; p
1,2
= ± j
ω
,
T/1
=
ω
и
переходная функция запишется в виде
h(t) = = k[1 – cos
ω
t].
В этом случае в системе возникают незатухающие колебания
(рис.1.15,в), что свидетельствует об отсутствии потерь энергии (замкнутая система). Поэтому
звено вида
kxyyT =+
&&
2
называют консервативным.
Пример 1.8. Пусть динамическое звено описывается ДУ второго порядка вида:
kхyayaya
=
+
+
210
&&&
. (1.49)
Коэффициенты уравнения заданы и равны: a
0
=0,01 a
1
=0,09 a
2
=1 k=0,26.
Определим частотные и временные характеристики звена, описываемого уравнением
(1.49).
Решение. Запишем уравнение (1.49) в виде
kxyyTyT =++
&&&
ξ2
2
. (1.50)
Сравнение коэффициентов уравнений (1.49) и (1.50) позволяет найти постоянную времени
Т и коэффициент демпфирования ξ. В результате вычислений получим Т=0,1с; ξ=0,45. Так
как
10 ≤≤
ξ
, то звено, описываемое ДУ (1.49) принадлежит к классу колебательных с
амплитудно - фазо - частотной характеристикой вида:
в
k
A(ω)
ω
ξ
= 0
0<
ξ
<1
ξ
> 1
а
ω
k
t
h(t)
ξ
2
ξ
1
<ξ
2
б
t
k
h(t)
Рис.1.15