Власов К.П. Теория автоматического управления
Подождите немного. Документ загружается.


263
()
[]
{}
[]
*
21
*
2121
)1()1)(1(
)1()1)(1(
u
uvs
ss
ij
LLL
LLLPPP
P
T
−−−
−−−+++
=
Δ
Δ
=
∑
K
KK
, (1.56)
здесь Δ – определитель графа; * – знак «звездочки» обозначает, что учитываются произве-
дения только некасающихся (даже в точке) контуров, число которых равно
u; P
s
– переда-
ча
s-го пути, число которых равно v; Δ
s
– алгебраическое дополнение s-го пути, представ-
ляющее собой определитель графа
Δ, из которого исключены все контуры, которых каса-
ется
s-й путь; (именно поэтому в числителе стоит знак *). Если s-й путь касается всех кон-
туров, то
Δ
s
= 1.
Для графа, представленного на рис.1.30 определитель
Δ в соответствии с (1.56) бу-
дет:
Δ = (1 – L
1
) (1 – L
2
) (1 – L
3
) (1 – L
4
) = 1 – (L
1
+ L
2
+ L
3
+ L
4
) +
+
(L
1
L
2
+ L
1
L
3
+ L
1
L
4
++ L
2
L
3
+ L
2
L
4
+ L
3
L
4
) –
– (
L
1
L
2
L
3
+ L
1
L
2
L
4
+ L
2
L
3
L
4
+ L
1
L
3
L
4
) + L
1
L
2
L
3
L
4
.
Поскольку должны учитываться произведения только несоприкасающихся контуров,
имеем
Δ
*
= [1 – (L
1
+ L
2
+ L
3
+ L
4
) + L
1
L
2
] (не касаются друг друга только контуры 1 и 2).
Алгебраические дополнения, полученные из определителя графа
Δ
*
: Δ
I
= 1 –
(
L
1
+ L
2
+ L
3
) + L
1
L
2
(путь P
I
касается только контура L
4
в точке x
4
); Δ
II
= 1 – L
1
; Δ
III
= 1 –
L
1
.
Тогда в соответствии с (1.56) передача графа от входа
x
1
к выходу x
4
будет:
214321
1III1II21321I
14
)(1
)1()1(])(1[
1
4
LLLLLL
LPLPLLLLLP
T
X
X
++++−
−
+
−
+
+
+
+
−
==
.
При рассмотрении АСУ передачи ветвей, входящих в передачи путей и передачи
контуров, представляют собой передаточные функции.
Пример 1.12. Пусть имеем
структурную схему, показанную
на рис.1.31,
а. Соответствующий граф
имеет вид, показан на рис.1.31,б.
Здесь
L
1
= –W
1
W
2
; P
1
= 1
⋅
W
1
= W
1
;
Δ
1
= 1. Тогда воспользовавшись фор-
мулой Мезона (1.56) получим:
)()(1
)(
1
)(
21
1
1
11
pWpW
pW
L
P
pWT
xyxy
+
=
−
Δ
==
.
W
1
–W
2
Δ
x
y
W
1
–W
2
Δ
x
y
L
1
1
Рис.1.31
а
б

264
Этот результат естественно со-
ответствует полученному ранее для
параллельно- встречного соединения
звеньев (1.55)
Пример 1.13. Пусть струк-
турная схема системы имеет вид, по-
казанный на рис.1.32,
а. Требуется
найти передаточную функцию по ка-
налу
x→y. Соответствующий граф по-
казан на рис.1.32,б. В соответствии с (1.56) найдем:
L
1
= –W
1
W
2
W
5
; L
2
= –W
2
W
3
W
4
; P
1
= W
1
W
2
W
3
;
Δ
*
= (1 – L
1
)(1 – L
2
) = 1 - (L
1
+ L
2
) =
= 1 + W
2
(W
1
W
5
+ W
3
W
4
); Δ
1
= 1.
Тогда, воспользовавшись (1.56), получим искомую передаточную функцию:
)(1
)(
43512
321
WWWWW
WWW
pW
xy
++
=
.
Пример 1.14. Пусть динамическое звено представляет собой цепь RLC (рис.1.2).
Требуется найти передаточную функцию этого звена по каналу
x=i →
R
y
u=
.
Решение. Так как цепь RLC имеет две энергетические емкости, то оператор пре-
образования может быть представлен передаточной функцией вида:
12
22
)(
++
=
pTpT
k
p
xy
W
ξ
(1.57)
где
k,T и ξ – искомые параметры, зависящие от величин R, L и C. Эти параметры можно
определить, составив граф, отображающий математическую модель электрической цепи в
переменных состояния (1.14):
11
12
11
21 2
2
vCvCx
vLvRLv
yRv
−−
−−
⎫
=− +
⎪
=−
⎬
⎪
=
⎭
&
&
(1.58)
Граф, отображающий систему уравнений (1.58) изображен на рис.1.33, где 1/р – оз-
начает операцию интегрирования переменной.
Рис.1.32
–W
5
–W
4
W
1
W
2
W
3
y
x 1
2 3
4
а
–W
5
–W
4
W
1
W
2
W
3
y x
1
2
3
4
1
1
L
1
б
L
2

265
Воспользовавшись формулой Мезона (1.56), запишем
2
1
22
12
/
()
1( )
1/ 1/ 1
xy
PRLCp
R
Wp
LL
R
Lp LCp LCp RCp
== =
−+
+
+++
(1.59)
Сравнив (1.57) с (1.59), получим k=R;
LCT =
;
LCR /5,0=
ξ
. Таким образом,
модель в переменных состояния в принципе может быть представлена в виде графа, кото-
рый позволяет найти оператор преобразования сигнала в виде передаточной функции по
исследуемому каналу.
2.3 МНОГОМЕРНЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
К
многомерным относятся АСУ, имеющие несколько управляемых величин y
j
(
mj ...,,2,1=
). Это имеет место во многих современных сложных системах.
Многомерная система предполагает наличие
много-
мерного
объекта управления (рис.1.34), который характери-
зуется существованием нескольких входов (точек приложе-
ния управляющих
i
u
и возмущающих
μ
f
воздействий) и не-
скольких выходов (управляемых величин
y
j
). Многомерный
объект описывается системой уравнений, которую удобно представлять в матричной
форме. Введем: 1)
m-мерный вектор управляемых величин -
12j
... ...
T
m
yyyy y
⎡⎤
=
⎣⎦
; 2)
k
-мерный вектор управляющих величин -
12j
... ...
T
k
uuuu u
⎡
⎤
=
⎣
⎦
; 3) l-мерный век-
тор возмущений -
[]
τ
l
fffff ......
m21
=
, где Т –операция транспонирования матрицы.
Если управляемые величины имеют разную физическую природу, то они должны
входить в вектор-столбец со своими весовыми коэффициентами, уравнивающими их раз-
мерности. Аналогичным образом формируются векторы управления и возмущений.
Линеаризованные уравнения многомерного объекта могут быть представлены в
матричном виде:
ОУ
f
μ
y
j
u
i
Рис.1.34

266
( ) () ( ) () ( ) ()
p
yt p ut p f t⋅= ⋅+⋅qrs
, (1.60)
где
(),(),()
p
ppqrs
- операторные матрицы;
11 1
1
() ... ()
( ) ... ... ...
() ... ()
m
mmm
qp q p
p
qp q p
⎡⎤
⎢⎥
=
⎢⎥
⎢⎥
⎣⎦
q
;
11 1
1
() ... ()
( ) ... ... ...
() ... ()
k
mmk
rp rp
p
rp rp
⎡
⎤
⎢
⎥
=
⎢
⎥
⎢
⎥
⎣
⎦
r
;
11 1
1
() ... ()
( ) ... ... ...
() ... ()
l
mml
s
psp
p
s
psp
⎡
⎤
⎢
⎥
=
⎢
⎥
⎢
⎥
⎣
⎦
s
.
Преобразовав (1.60) по Лапласу при нулевых начальных условиях, получим
() () () () () ()
p
Yp p Up p Fp⋅=⋅+⋅QRS
. (1.61)
Умножив левую и правую части уравнения (1.61) на обратную матрицу
1
()
p
−
Q
, по-
лучим
() () () () ()
ou of
Yp p Up p Fp=⋅+⋅WW
, (1.62)
где
ou
(); ()
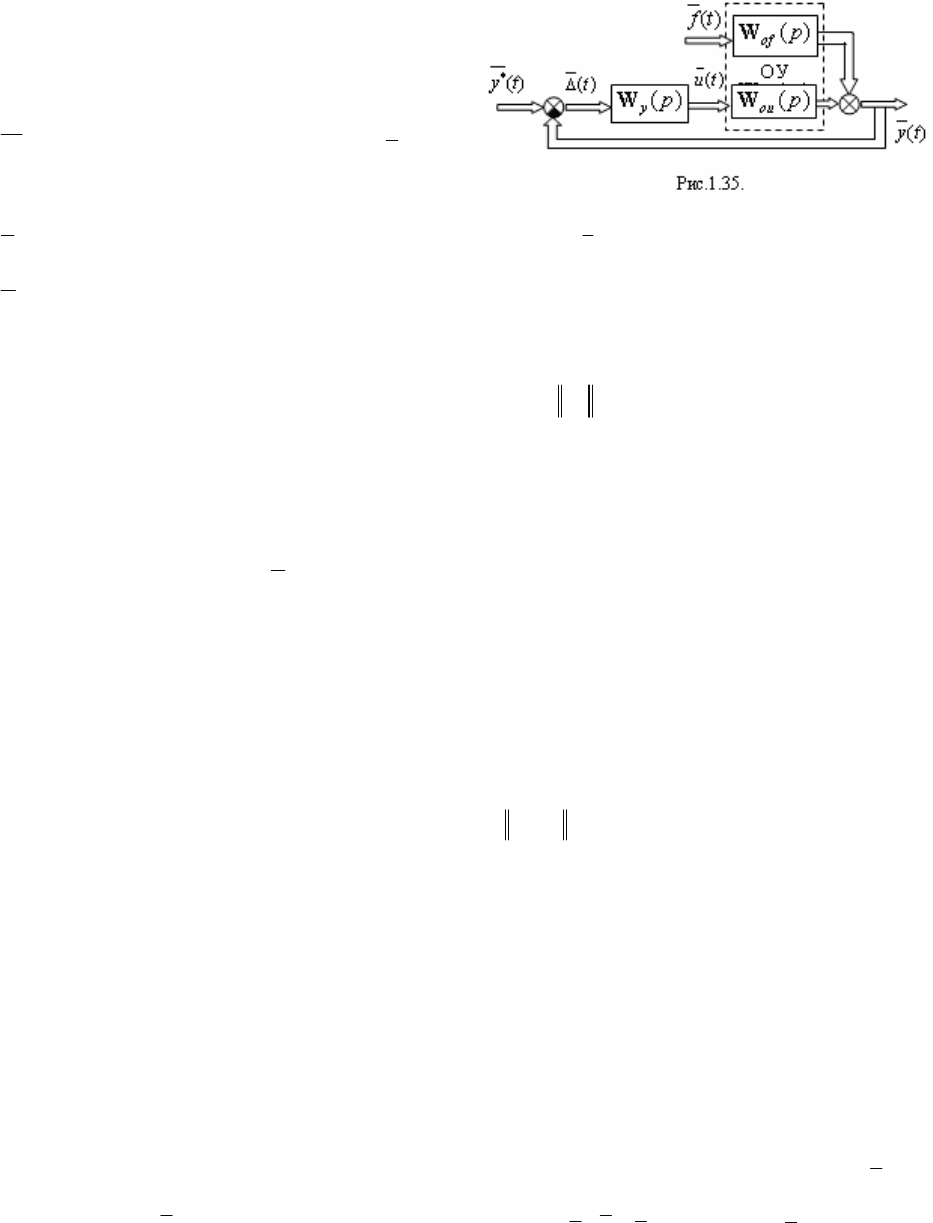
of
p
pWW
– матрицы передаточных функций объекта управления (ОУ) соответ-
ственно для управляющих и возмущающих воздействий (рис.1.35).
Выражение (1.62) позволяет установить связь между управляемыми величинами и
возмущающими и управляющими воздействиями объекта. Так, при
m = 3; k = 2 и l = 0
уравнение (1.62) можно записать в виде:
⎪
⎭
⎪
⎬
⎫
+=
+=
+=
).()()()()(
);()()()()(
);()()()()(
2321313
2221212
2121111
pUpWpUpWpY
pUpWpUpWpY
pUpWpUpWpY
,
где W
ij
(p)– передаточная функция объекта управления по каналу u
i
-y
j
;
ki ,1=
;
mj ,1=
.
Если в матрице передаточных функций
ou
()pW
или
()
of
p
W
для каждого элемента
матрицы (частной передаточной функции) найти оригинал, то будет получена так назы-
ваемая матрица Коши (матрица весовых функций). Например, для управляющих воздей-
ствий
11 1
ou
1
() ... ()
( ) ... ... ...
() ... ()
k
mmk
wt wt
t
wt wt
⎡
⎤
⎢
⎥
=
⎢
⎥
⎢
⎥
⎣
⎦
w
.
Если в нулевой момент времени на все входы объекта поступают управляющие
воздействия
)(tu
i
, то на основании принципа суперпозиции изменение j-й управляемой
величины может быть определено с помощью интеграла Дюамеля (4.81):
∑
=
∫
−⋅=
k
i
t
dt
ji
w
i
ut
j
y
1
0
)()()(
τττ
.
267
На рис.1.35 представлена структур-
ная схема замкнутой многомерной системы
управления объектом ОУ. На схеме все ука-
занные символы соответствуют матрицам:
)(
*
ty
– задающих воздействий;
)(ty
–
управляемых (выходных) величин объекта;
)(tΔ
– отклонений для каждой управляемой величины;
)(tu
– управляющих воздействий;
)(tf
– возмущений;
ou
()pW
– передаточных функций объекта по управлениям;
()
of
p
W
–
передаточных функций объекта по возмущениям. Кроме того, введена матрица переда-
точных функций управляющего устройства
()
yji
kn
pk
×
=W
, которая определяет исполь-
зуемые законы управления и показывает связь между изображениями управляющих воз-
действий и отклонений:
11 1 1
1
() () ... () ()
( ) ... ... ... ... ...
() () ... () ()
n
kk knn
Up kp k p p
Up
Up k p k p p
⎡
⎤⎡ ⎤⎡ ⎤
⎢
⎥⎢ ⎥⎢ ⎥
⎢
⎥⎢ ⎥⎢ ⎥
⎢
⎥⎢ ⎥⎢ ⎥
⎣
⎦⎣ ⎦⎣ ⎦
Δ
== ×
Δ
.
Матрица передаточных функций разомкнутой системы имеет вид
ou y
() () ()
p
ppp
=
WWW
.
Характеристическая матрица системы имеет размерность
nn
×
:
() () ()
pji
nn
ppdp
×
=+ =DIW
,
где
I – единичная матрица
nn×
, т.е. матрица, у которой все элементы главной диагонали
равны единице, а остальные – нулю.
Характеристическое уравнение системы получается приравниванием к нулю опре-
делителя характеристической матрицы.
Заметим, что отклонения
i
Δ
(
ni ...,,2,1
=
) представляют собой некоторые абст-
рактные величины, знание которых полностью определяет текущее состояние системы,
т.е. являются переменными состояния.
Матрицы передаточных функций замкнутой системы по каналам: задающие
*y
и
возмущающие
f
воздействия
→
выходные величины
y
,
f
,
*y →
ошибки
Δ
, могут быть
определены из выражений
11
*
11
*
() () (); () () ();
( ) ( ); ( ) ( ) ( ).
yy p fy of
yfof
p
pp p pp
p
pppp
−−
−−
ΔΔ
=⋅ = ⋅
==−⋅
WWDWWD
WD W WD
(1.63)

268
Полученные выражения для матриц передаточных функций замкнутой системы по-
зволяют найти изображения ошибок
()
p
Δ
и управляемых величин
()Yp
. Так, например,
для матрицы изображений ошибок можно записать
1
*
()
( ) .... ( ) *( ) ( ) ( )
()
yf
m
p
p
pY p pF p
p
ΔΔ
Δ
⎡⎤
⎢⎥
Δ= = +
⎢⎥
⎢⎥
Δ
⎣⎦
WW
Пользуясь полученным выражением и взяв обратное преобразование Лапласа мож-
но найти оригиналы ошибок
)(tΔ
и оценить качество функционирования многомерной
системы, а при необходимости скорректировать параметры и структуру управляющего
устройства.
2.3.1. Управляемость и наблюдаемость
Рассмотрим n-мерное пространство состояний
ν
, в котором каждому состоянию
системы соответствует некоторое положение изображающей точки, определяемое значе-
ниями переменные состояния
i
ν
(
ni ...,,2,1
=
).
Пусть в пространстве состояний
ν
заданы два множества
1
G
ν
⊂
и
2
G
ν
⊂
. Рас-
сматриваемая система будет управляемой, если существует такое управление
[
]
1
( ) ...
T
k
ut u u=
, определенное на конечном интервале времени
Tt ≤≤0
, которое пере-
водит изображающую точку в пространстве
ν
из подобласти
1
G
в подобласть
2
G
.
Можно сузить определение управляемости и понимать под ним возможность пере-
вода изображающей точки из любой области пространства состояний
ν
в начало коорди-
нат, т.е. в точку, соответствующую нулевым отклонениям управляемых координат
i
y
от
заданных значений
*
i
y
. Система будет полностью управляемой, если каждое состояние
управляемо в этом смысле. Если невозможно подобрать управления, приводящие систему
в начало координат ни из одного возможного состояния, система полностью неуправляе-
ма.
Система считается наблюдаемой, если в формировании вектора выходных коорди-
нат
y
участвуют все составляющие вектора переменных состояния
ν
. Если ни одна из

269
составляющих вектора
ν
не влияет на формирование выхода системы
y
, то такая система
ненаблюдаема.
Исходные дифференциальные уравнения многомерной системы управления могут
быть представлены в форме Коши в матричной записи:
;
;
,
d
uf
dt
y
u
ν
ν
ν
ν
⎫
=++
⎪
⎪
⎪
=
⎬
⎪
=
⎪
⎪
⎭
ABE
C
D
(1.64)
г
де
ν
– вектор фазовых координат размерности 1×n (n соответствует порядку дифферен-
циального уравнения);
y
– вектор управляемых (выходных) величин системы размерно-
сти 1×m;
u
– вектор управляющих воздействий размерности 1×k;
f
– вектор возму-
щающих и задающих воздействий размерности 1×l;
ji
nn
a
×
=A
;
ji
mk
b
×
=B
;
ji
mn
c
×
=C
;
ji
kn
d
×
=D
;
ji
ml
e
×
=E
– соответствующие матрицы коэффициентов.
От пространства состояний
ν
перейдем к преобразованному пространству состоя-
ний
*
ν
посредством преобразования
*
ν
ν
= R
, где
R
– матрица коэффициентов размер-
ности
mm×
.
Тогда вместо (1.64) будем иметь
*
** * *;
**;
**.
d
uf
dt
y
u
ν
ν
ν
ν
⎫
=++
⎪
⎪
⎪
=
⎬
⎪
=
⎪
⎪
⎭
ABE
C
D
(1.65)
Здесь использованы преобразованные матрицы коэффициентов:
1
*
−
=
ARAR
;
=
BRB
;
1
*
−
=CCR
;
1
*
−
=
DDR
;
* =ERE
.
Введение новых переменных состояния посредством преобразования
*
ν
ν
= R
при-
водит к эквивалентным системам различной структуры. При некотором преобразовании
может оказаться, что часть управляющих величин не входит в некоторые дифференциаль-
ные уравнения (1.65) или часть переменных состояния не участвует в формировании вы-
хода
y
. В первом случае система будет не полностью управляемой, во втором – не полно-
стью наблюдаемой.

270
В случае не полностью управляемой системы ее исходное дифференциальное
уравнение, входящее в систему (1.64) может быть представлено в виде
1
11 1 12 2
2
22 2
,
,
d
u
dt
d
dt
ν
νν
ν
ν
=++
=
AA B
A
,
где
1
ν
- вектор координат, соответствующий управляемой части системы, размерностью
1
ν
⋅
;
2
ν
- то же, но неуправляемой части, размерности
1( )m
ν
⋅
−
.
Р. Калман показал, что размерность v управляемой части системы, т.е. порядок
первой группы уравнений (1.65), совпадает с рангом следующей матрицы:
2-1
,, ,
n
nkn
×
=U B AB A B ... A B
. (1.66)
При
v n=
система полностью управляема, при
0vn
<
<
– не полностью управляема, при
v0=
– неуправляема.
В случае не полностью наблюдаемой системы переменные состояния группы
2
ν
не
участвуют в формировании управляемых
y
и управляющих
u
величин, а также перемен-
ных состояния группы
1
ν
, т.е. группа
2
ν
относится к ненаблюдаемым переменным со-
стояния. В этом случае уравления системы могут быть представлены в виде:
1
11 1 1
2
21 1 22 2 2
11 11
;
;
; .
d
dt
d
dt
yu
ν
ν
ν
νν
νν
=+
=++
==
ABU
AA BU
CD
(1.67)
При этом, как показал Калман, порядок v первой группы уравнений (1.67) совпада-
ет с рангом следующей матрицы
:
21
( ) ... ( )
TTT TT TnT
nmn
−
×
=VC AC AC A C
.
При
v n=
система полностью наблюдаема, при
0vn
<
<
– не полностью наблюдаема; при
v0=
– ненаблюдаема.
Пример 1.15
. Рассмотрим систему, изображенную на рис.1.36, а. Количество пе-
ременных состояния
3=n
(они обусловлены наличием в системе трех энергетических ем-
костей с постоянными времени
321
,, TTT
). В отсутствие управляющего
Рис.1.36
1
1
1
+pT
u
1
)1)(1(
1
32
1
++
+
pTpT
pT
y
u
2
1
1
1
+pT
u
1
)1)(1(
1
32
1
++
+
pTpT
pT
y
б
а

271
сигнала
2
u
управление
1
u
воздействует только на две переменных состояния, обусловлен-
ные емкостями
2
T
и
3
T
(
1
T
сокращается), т.е.
v2 3n
=
<=
, и система не полностью управ-
ляема. При подаче сигнала
2
u
появляется возможность воздействие и на переменную со-
стояния обусловленную емкостью
1
T
и система становится полностью управляемой
(
v3n==
).
Система, изображенная на рис.1.36,б, не полностью наблюдаема, так как в форми-
ровании выхода
y
из трех переменных состояния участвуют только две -
2
T
и
3
T
.
Таким образом, понятие управляемости системы характеризует способность входа
)(tu
возбуждать все переменные состояния (фазовые координаты)
()t
ν
; понятие наблю-
даемости – способность состояния
()t
ν
изменять выходной сигнал
)(ty
.
272
3. УСТОЙЧИВОСТЬ И КАЧЕСТВО ФУНКЦИОНИРОВАНИЯ АСУ
3.1. УСТОЙЧИВОСТЬ АСУ
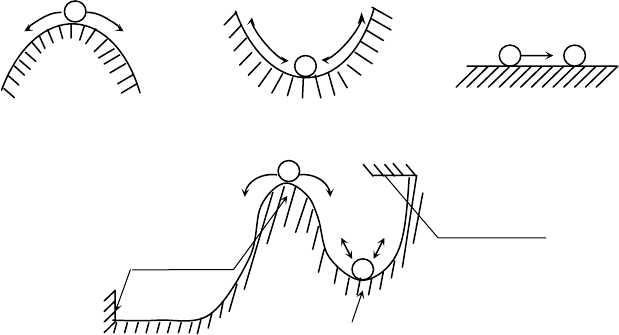
Устойчивость АСУ характеризует способность системы возвращаться в состояние
равновесия после исчезновения внешних сил, которые вывели ее из этого состояния. По-
нятие ”устойчивость” наглядно иллюстрирует рис. 1.37, на котором представлена физиче-
ская система шар – опор-
ная поверхность. На
рис. 1.37, а, б шар нахо-
дится в положении равно-
весия. При отклонении
от
этого положения в любую
сторону в первом случае
(рис.1.37, а) шар не может
вернуться в исходное по-
ложение (неустойчивое
равновесие), а во втором
(рис.1.37, б) – возвращается (устойчивое равновесие). Если опорная поверхность пред-
ставляет собой горизонтальную плоскость, то шар движется по ней до тех пор, пока дей-
ствует движущая сила
F
д
и после ее исчезновения останавливается в любой точке на плос-
кости (безразличное равновесие). Такая система иногда называется нейтральной (рис.1
37,в).
Говорят, что система устойчива в малом, если констатируют лишь факт наличия
области устойчивости, но не определяют каким-либо образом ее границы. Если границы
устойчивости определены, т.е. границы области начальных
отклонений, при которых сис-
тема возвращается в состояние равновесия, известны (рис.1.37, г), и выяснено, что реаль-
ные начальные отклонения принадлежат этой области, то система устойчива в большом.
Когда система возвращается в состояние равновесия при любых начальных отклонениях,
ее называют устойчивой в целом, т.е. в малом и большом.
3.1.1. Переходные процессы
в АСУ
В любой АСУ в результате воздействия возмущающих сил, с одной стороны, и вос-
станавливающего действия управляющего устройства, с другой, возникает переходный
процесс: переход АСУ из одного состояния в другое. Рассмотрим различные типы пере-
ходного процесса.
Пусть АСУ описывается дифференциальным уравнением вида
Безразличное
равновесие
Неустойчивое
равновесие
Устойчивое
равновесие
Рис.1.37
Ограничения
Ограничение
Устойчивость в малом
а
б
в
г
F
д