Will D., Gebhardt N. (Hrsg.) Hydraulik: Grundlagen, Komponenten, Schaltungen
Подождите немного. Документ загружается.

418 14 Projektierung und Gestaltung von Kreisläufen
a
12
102
1
2
P
T
EV, AV
ER
VW 1
VW 2
VW 3
VDr 1
VDr 2
b
c
1
VW 1
VW 3
VW 2
EV
Halt
ERAV
1
2
11
2
221
2
2
0
P
T
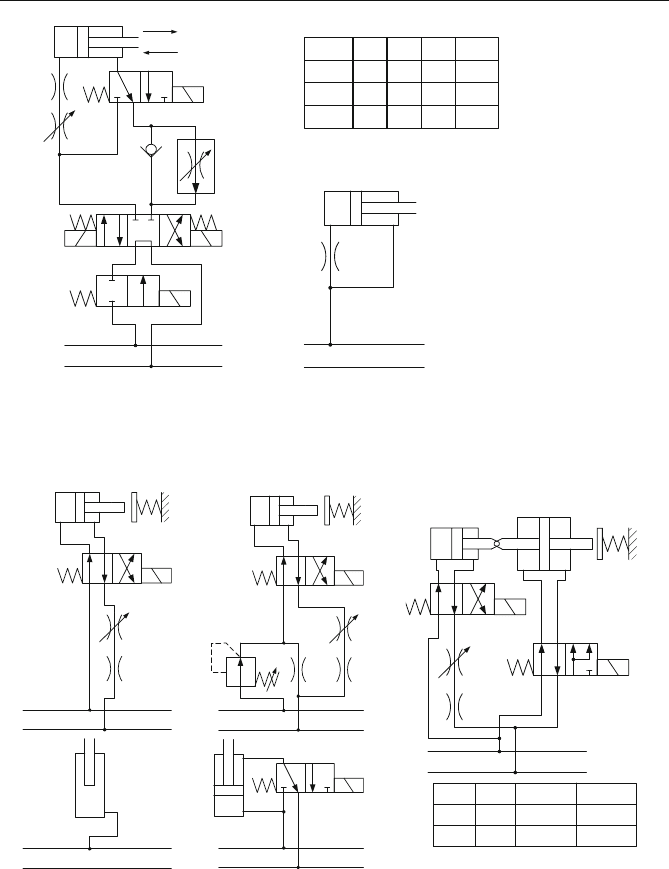
Abb. 14.5 Wegeventilgesteuerter Vorschubantrieb mit Eilgangschaltung. a Funktionsschaltplan
b Wegeventilschaltstellungen c Antriebsstruktur bei Eilvorlauf mit Hilfe der sogenannten Eil-
gangschaltung EV Eilvorlauf, AV Arbeitsvorschub, ER Eilrücklauf
a
d
VDr 1
VDr 2
P
T
12
P
T
b
e
VDr 1
VDr 2
P
T
12
P
T
12
VDr 3
c
VDr 1
VDr 2
P
T
12
12
VW 1
VW 2
VW 1
VW 2
Lösen
212
11 2
Schließen Verformen
Abb. 14.6 Wegeventilgesteuerte Kraftantriebe. a ohne Einstellmöglichkeit der Kraft b Kraft ein-
stellbar mit Hilfe eines Druckreduzierventils c Kraft in zwei Stufen einstellbar
d Gewichtsausgleich ohne Einstellmöglichkeit e Gewichtsausgleich mit Einstellmöglichkeit in
zwei Stufen
Müssen die Kräfte einstellbar sein, so kann eine Schaltung mit Druckreduzier-
ventil zum Einsatz kommen (Abb. 14.6 b). Diese Druckreduzierventile halten ihre
Regelfunktion nur dann aufrecht, wenn ein Volumenstrom vorhanden ist
14.3 Kreisläufe mit Druckquellen konstanten Drucksollwertes 419
(s. Abschn. 8.1.2); mit Hilfe von VDr 3 ist dies auch bei Stillstand des Ver-
brauchers gewährleistet. In dieser Schaltung ist aber unbedingt zu beachten, dass
die Druckregelung in der Phase des Anstoßens der Kolbenstange an den Anschlag
auf einen neuen Arbeitspunkt übergehen muss. Infolge der Verzögerungen im
Druckregelventil ist mit einer Kraftspitze zu rechnen. Ist das nicht zulässig, muss
gegebenenfalls die Kraft geregelt werden (s. Abschn. 14.3.2.2).
Sollen Teile nicht nur festgehalten, sondern verformt werden, sind oft sehr gro-
ße Kräfte notwendig. Sie werden bei festliegendem Druck mit Hilfe großer Kol-
benflächen realisiert. Nachteilig ist dabei, dass Arbeitskolbenbewegungen dann
große Volumenströme erfordern. In Abb. 14.6 c ist gezeigt, wie mit Hilfe zweier
Arbeitszylinder erreicht werden kann, dass Bewegungen (hier mit Lösen und
Schließen bezeichnet) mit kleiner und das Verformen mit großer Arbeitskolben-
fläche realisiert werden.
Nicht selten werden Kraftantriebe zum Gewichtsausgleich bei senkrecht be-
wegten Massen anstelle eines Gegengewichts eingesetzt. (Die Bewegung selbst
wird von einem anderen Antrieb realisiert.) Die Schaltung in Abb. 14.6 d ist sehr
einfach und gut geeignet, solange die zu kompensierende Kraft annähernd kon-
stant ist. Der Arbeitszylinder arbeitet beim Senken als Volumenstromquelle und
entlastet die Druckquelle. Ist die Veränderung der auszugleichenden Kräfte sehr
groß, so ist über die Schaltung in Abb. 14.6 e eine Anpassung in zwei Stufen mög-
lich.
a
102
12
12
P
T
b
21
c
12
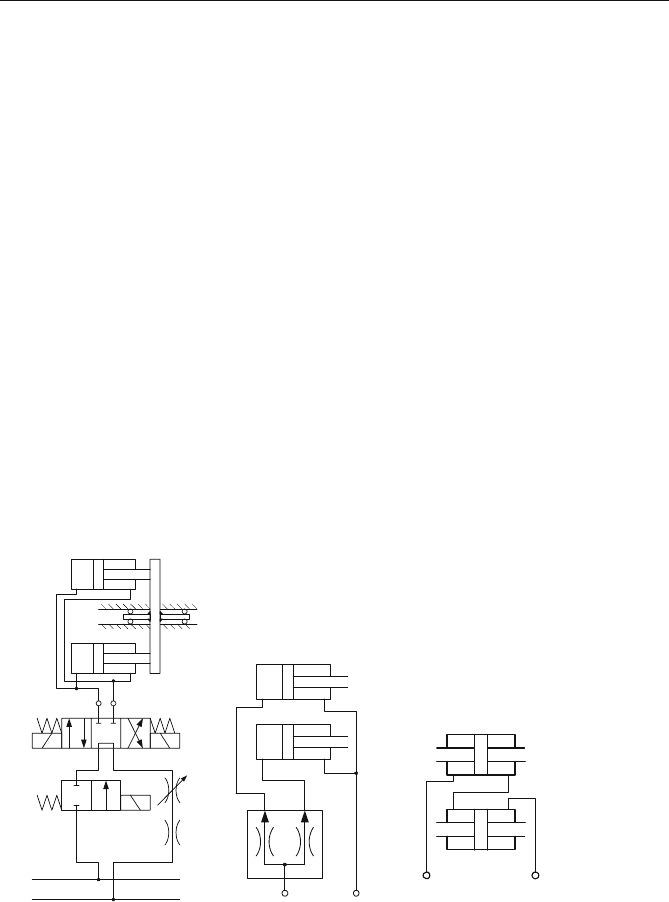
Abb. 14.7 Wegeventilgesteuerte Gleichlaufantriebe an einer Druckquelle. a starre mechanische
Verbindung mit Führungsschiene b Dosierung mit Hilfe eines vorgeschalteten Stromteilventils c
Reihenschaltung zweier Verbraucher mit gleich großen Kolbenringflächen
Gleichlaufantriebe. Sie können exakt weder den Geschwindigkeitsantrieben noch
den Positionsantrieben zugeordnet werden, da zum einen gleich große Ge-
schwindigkeiten, zum anderen aber immer eine bestimmte Relativlage der Ver-

420 14 Projektierung und Gestaltung von Kreisläufen
braucher zueinander gefordert sind. Abbildung 14.7 zeigt drei einfache, un-
geregelte Schaltungen an einer Druckquelle.
Die Steuerung bestimmt den Volumenstrom zu den Verbrauchern, die in Abb.
14.7 a mechanisch starr miteinander verbunden sind (oft in Lastaufzügen; ein
Verkanten wird durch Führungsschienen vermieden), in Abb. 14.7 b ein vor-
geschaltetes Stromteilventil besitzen oder in Abb. 14.7 c in Reihenschaltung an-
geordnet sind. In den Varianten nach Abb. 14.7 b und c entstehen bei ungleicher
Belastung der Verbraucher durch Leckvolumenströme und Fluidkompressibilität
Gleichlauffehler, die, meist an einem Anschlag, ausgeglichen werden müssen
(weitere Gleichlaufantriebe s. Abschn. 14.3.2.2 und 14.5).
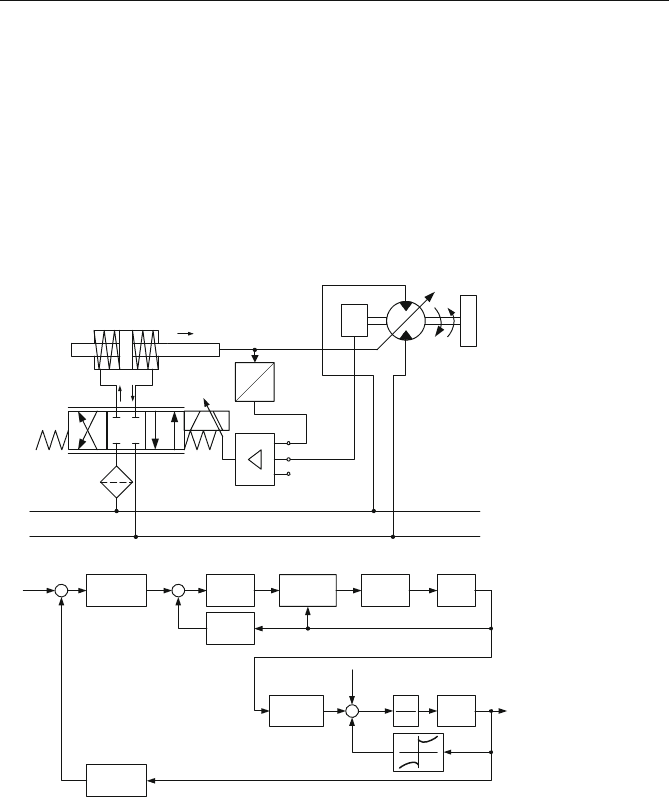
14.3.2.2 Antriebe mit Stetigsteuerventilen im Hauptstrom
Lagegeregelte Antriebe. Sie sind wegen ihrer hohen Steifigkeit gegenüber großen
Belastungskräften und ihrer hohen Dynamik auch bei großen bewegten Massen
die Klassiker der Servohydraulik. Die Steuerventile dieser Antriebe sind Servo-
ventile oder sog. Regelventile gemäß Abschn. 8.5.4, die eine stetige Veränderbar-
keit ihrer Drosselwiderstände auch in der Umgebung der Steuerschiebermittellage
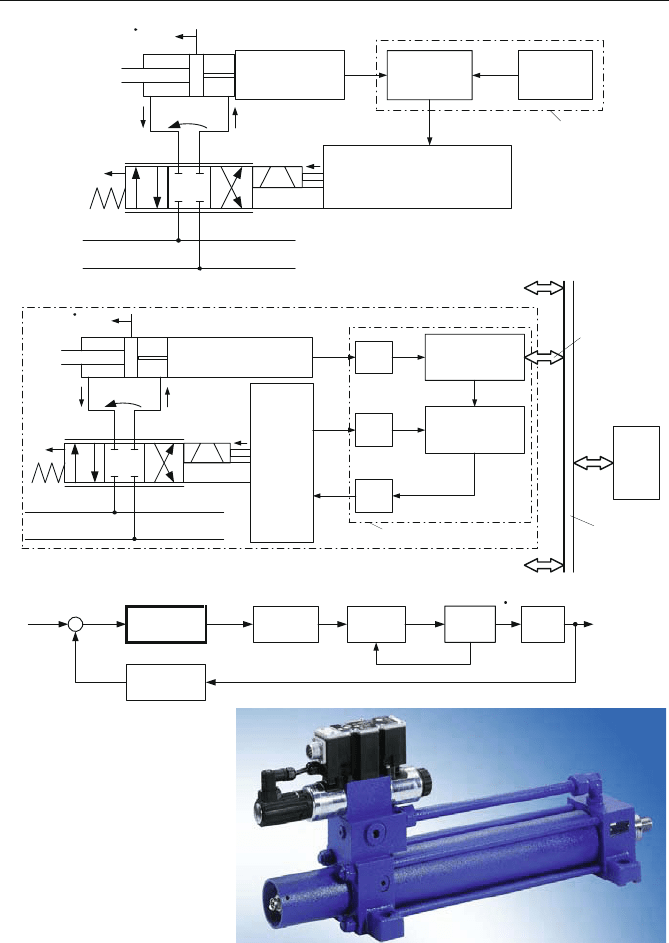
ermöglichen (negative Überdeckung). Abb. 14.8 a zeigt eine konventionelle Re-
gelkreisstruktur, die meisten elektronischen Funktionsgruppen sind in analoger
Technik realisiert. Der Lageregler des Kolbens befindet sich dabei i. Allg. im
Steuerschrank der Gesamtanlage, die Ventilelektronik und die des Kolbenweg-
sensors sind in ihre jeweilige Umgebung integriert. Das Steuerventil in Abb. 14.8
besitzt eine Lageregelung seines Steuerschiebers (s. Abb. 8.52).
Der Trend geht zur Integration der Lageregelung des Kolbens in den Antrieb,
so dass der Antrieb als komplette mechatronische Komponente eingesetzt werden
kann. Es muss von der Steuerung der Gesamtanlage nur noch die Führungsgröße
für die Kolbensollposition u
Ksoll
vorgegeben werden (s. Abb. 14.8 b). Das geht am
elegantesten mit Hilfe einer Feldbus-Schnittstelle, wenn die Regler in digitaler
Elektronik ausgeführt sind. Zu beachten ist, dass über den Feldbus auch die Regler
parametriert und Signale des Regelkreises in die Steuerung der Gesamtanlage
übertragen werden können. Dort können Optimierungsberechnungen der Regler-
einstellungen vorgenommen werden oder die Regelgröße wird im Sinne der Dia-
gnose auf die Überlagerung mit Oberwellen analysiert. Dass die Regler selbst we-
sentlich leistungsfähigere Algorithmen (z. B. die für eine Zustandsregelung) als in
analoger Technik (z. B. PD-Regler) abarbeiten können, wird in Abschn. 14.3.5.1
beispielhaft gezeigt.
Abbildung 14.8 c zeigt das für beide Varianten etwa gleiche qualitative Block-
schaltbild der Lageregelung des Kolbens. Aus ihm entstehen in Abschn. 14.3.5.1
die verschiedenen quantitativen Blockschaltbilder für die dann verwendeten unter-
schiedlichen Regler der Kolbenposition.
Abbildung 14.8 d zeigt eine Antriebseinheit mit integrierter Elektronik von
Bosch Rexroth [14.16, 14.17].
Geschwindigkeits- oder Kraftregelungen. Neben Lage- sind auf diese Weise
auch Geschwindigkeits- oder Kraftregelungen aufzubauen; anstelle der Position s
K
müssten dann die Geschwindigkeit ds
K
/dt oder die Kraft F gemessen werden.
14.3 Kreisläufe mit Druckquellen konstanten Drucksollwertes 421
a
P
T
Integr. Auswerte-
elektronik der
Wegmessung
Integr. Ventilelektronik mit:
Sensorsignalverarbeitung,
Lageregler (Steuerschieber),
Verstärker mit Stromausgang
Lagegeber
i
Lageregler-
elektronik
(Kolben)
u
Ksoll
u
Kist
Steuerung
Gesamt-
anlage
u
Ssoll
Steuer-
schrank
QQ
s
K
, s
K
s
S
Druckdifferenz
b
P
T
Analoge Elektronik
Wegmessg.
Analoge
Elektronik
Ventil:
Sensor-
signal-
verarbei-
tung,
Verstär-
ker mit
Strom-
ausgang
Lagegeber
i
Vergleich +
Lageregler
Kolben
u
Kist
Steue-
rung
der Ge-
samt-
anlage
Feldbus
ADU
u
Kistk
ADU
u
Sist
u
Sistk
Vergleich +
Lageregler
Steuerschieber
u
Ssollk
DAU
u
stell
u
stellk
Digitale Elektronik (Mikrocontroller)
QQ
s
K
, s
K
s
S
Druckdifferenz
Eingabe
u
Ksollk
, Regler-
parameter,
Auslesen
u
Kistk
c
dt
³
Lageregler
Kolben
Stell-
zylinder
Lagesensor
Kolben
-
Q
Druckdifferenz
Steuer-
schieber
u
Ksoll(k)
'
u
K(k)
u
Ssoll(k)
s
S
Steuer-
spalte
s
K
u
Kist(k)
s
K
d
Abb. 14.8 Lagegeregelter Antrieb mit Stetigsteuerventil im Hauptstrom. a Antrieb in kon-
ventioneller Struktur b Antrieb als komplette mechatronische Komponente (alle Regelungen
digital und in den Antrieb integriert) c qualitatives Blockschaltbild des Antriebes d Hydro-
zylinder CST3 von Bosch Rexroth [14.16]

422 14 Projektierung und Gestaltung von Kreisläufen
Modifikationsmöglichkeiten sind:
Zu einem Geschwindigkeitsantrieb kann ein lagegeregelter Antrieb werden,
dessen Führungsgröße u
Ksoll
(t) eine Rampenfunktion ist: u
Ksoll
(t) = K t.
Ein Kraftantrieb entsteht auch, wenn die Druckdifferenz zwischen den Zylin-
deranschlüssen geregelt wird.
Gleichlaufantriebe. Sie sind am günstigsten mit Hilfe zweier lagegeregelter An-
triebe zu realisieren, wobei die Istposition des einen die Lagesollposition des an-
deren vorgibt. An den Regler dieses Antriebes werden dabei große Anforderungen
gestellt, um Nachlauffehler zu minimieren.
Rotatorische Antriebe. Tritt an die Stelle des Arbeitszylinders ein Hydromotor und
ist das Messglied ein elektrischer Winkelsensor, Drehmomentsensor oder ein
Drehzahlmesser, dann können Winkel-, Moment- oder Drehzahlregelungen auf-
gebaut werden.
Volumenstromgeregelte Antriebe. Wenn an die Stelle des Regelventils ein Propor-
tional-Wegeventil mit positiver Überdeckung in Mittelstellung tritt (s. Abb. 8.61 a
und b), wird es meist in Verbindung mit Druckdifferenzventilen, sog. Druck-
waagen, zur stetigen Antriebssteuerung eingesetzt (Abb. 14.9).
Prinzip ist dabei, dass aus dem Druckdifferenzventil und dem drosselnden
Steuerspalt des Proportional-Wegeventils eine Stromregelfunktion analog der
Wirkungsweise eines Zwei-Wege-Stromregelventils (s. Abschn. 8.2.2) entsteht.
Der drosselnde Steuerspalt, – dieser kann, abhängig von der Konstruktion, der ab-
laufseitige oder auch der zulaufseitige sein – übernimmt dabei die Funktion der
Messdrossel im Stromregelventil. Die Federvorspannung dieser Druckdifferenz-
ventile ist meist nicht verstellbar; sie wird so bemessen, dass über der Messdrossel
immer ein annähernd konstanter Druckabfall (meist 5 bar oder 10 bar, am ver-
breitetsten sind 10 bar) und damit ein bei konstant eingestelltem Drosselquer-
schnitt konstanter Volumenstrom entsteht. Bei höher eingestelltem Druckabfall
sind die Regelgenauigkeit, aber auch die Drosselverluste höher. In Abb. 14.9 sind
zwei Varianten eines solchen Antriebes dargestellt.
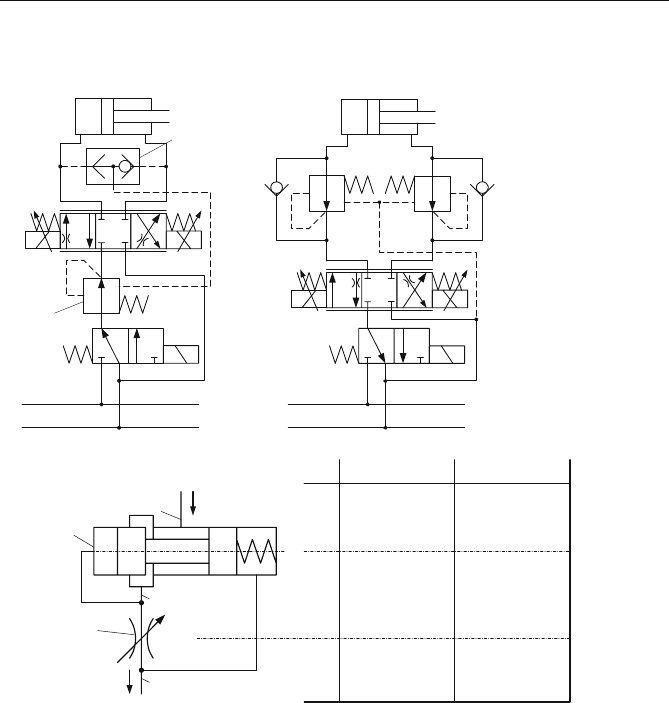
Beide Antriebe arbeiten in beiden Bewegungsrichtungen des Verbrauchers vo-
lumenstromgeregelt. In Abb. 14.9 a arbeitet ein Zulaufdruckdifferenzventil so mit
einem Wechselventil zusammen, dass immer die Zulaufseite des Zylinders mit
dem Druckdifferenzventil verbunden ist. Die Wirkungsweise ist aus Abb. 14.9 c
zu erkennen.
In Abb. 14.9 b werden zwei Druckdifferenzventile in den Verbraucherleitungen
so angeordnet, dass jeweils eine überbrückt und die andere wirksam ist (Wir-
kungsweise und Drücke s. ebenfalls Abb. 14.9 c). Die in den Schaltungen ver-
wendeten 3/2-Wegeventile verhindern in der Funktion Halt ein Driften der Ver-
braucher, indem der Antrieb von der Druckquelle getrennt werden kann; sie haben
keinen Einfluss auf die Volumenstromregelung.
Wesentlicher Unterschied zwischen den Schaltungen ist, dass der Verbraucher
in Abb. 14.9 a ablaufseitig am Tankleitungsdruck liegt, während er in Abb. 14.9 b
14.3 Kreisläufe mit Druckquellen konstanten Drucksollwertes 423
zulaufseitig am Druckquellendruck liegt und damit zwischen Druckkräften ein-
gespannt ist (s. Abschn. 5.4.1).
a
Druckwaage
P
T
Wechsel-
ventil
12
b
P
T
12
c
p
Druckquelle
Q
geregelt
Q
geregelt
Druckdif-
ferenz-
ventil
Steuerspalt
als Meß-
drossel
p
1
p
2
p
3
p
1
=
in Abb. 14.9 a in Abb. 14.9 b
p
Tankleitung
p
3
=
p
2
=
p
Tankleitung
+ 10 bar
p
Verbr/Ablaufseite
p
Verbr/Zulaufseite
p
Verbr/Zulaufseite
+10 bar
Abb. 14.9 Mit Hilfe von Proportionalwegeventil und Druckdifferenzventil volumenstrom-
geregelte Antriebe. a mit Zulaufdruckdifferenzventil und Wechselventil b mit Druckdifferenz-
ventilen in den Verbraucherleitungen c Wirkungsweise der beiden Volumenstromregelungen und
entstehende Drücke bei Druckdifferenzventilen für 10 bar
Welche Struktur günstiger ist, hängt vom konkreten Einsatzfall ab und ist bei
der Projektierung zu berechnen. Mit Hilfe beider Schaltungen können Lastkraft-
und auch Quellendruckschwankungen statisch sehr genau ausgeregelt werden, so-
lange der Mindestdruck über der Messdrossel (meist 10 bar) zur Verfügung steht.
Abrupte Lastkraft-, Quellendruckänderungen oder schnelle Steuerspaltver-
änderungen können zu kurzzeitig großen Regelfehlern führen, weil sich der Ver-
schiebevolumenstrom bei der Positionsänderung des Steuerschiebers des Druck-
differenzventils dem Volumenstrom Q
geregelt
überlagert. Die Drosselverluste der
Schaltungen werden bestimmt von der Differenz des Druckquellen- und des Last-
druckes.
424 14 Projektierung und Gestaltung von Kreisläufen
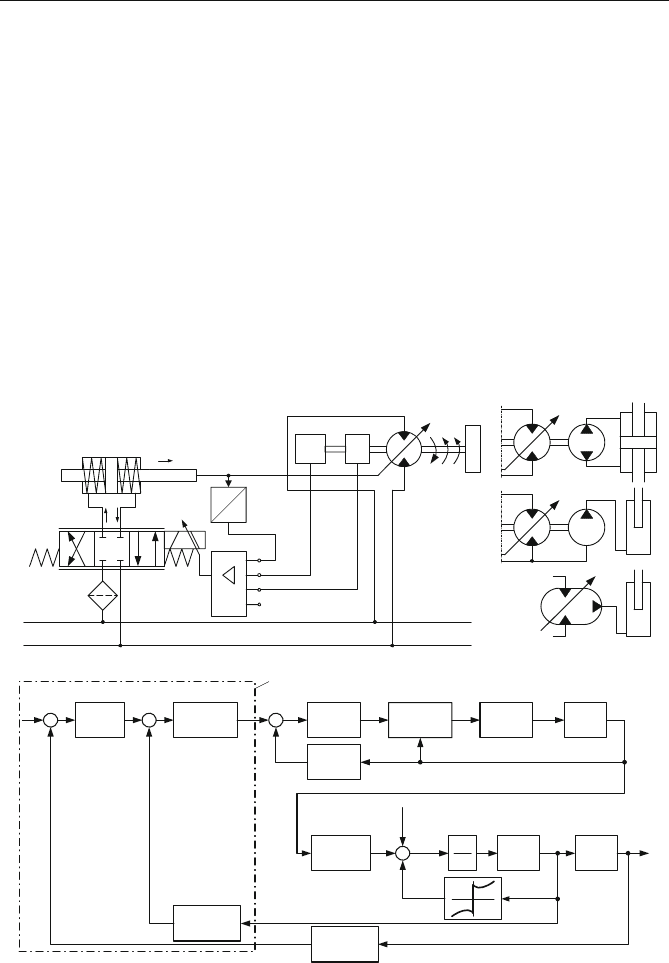
14.3.2.3 Verdrängergesteuerte Stetigantriebe (Sekundärregelung)
Für Antriebe mit Hydromotoren, die ein einstellbares Verdrängungsvolumen be-
sitzen, ist es möglich, die Versorgung aus einer Druckquelle ohne Drosselung des
Hauptstromes zu realisieren. Der Parameter, der die Anpassung des Antriebes an
den jeweiligen Betriebszustand vornimmt, ist das Verdrängungsvolumen. Es wird
innerhalb einer Regelung so eingestellt, dass der Hydromotor gerade das von Last
und Reibung geforderte Moment M aufbringt [14.5]. In Abb. 14.10 ist als typi-
sches Beispiel ein drehzahlgeregelter verdrängergesteuerter Antrieb als Schaltplan
und als regelungstechnisches Blockschaltbild dargestellt.
a
s
u
P
T
TG
(Drehzahlsollwert)
J
M
L
u
nsoll
u
nist
u
sist
n
ist
i
QQ
v
K
, s
K
S
K
V
K
n
M
L
J
u
Q
Stellkolbenweg
Stellkolben-
geschwindigkeit
Drehzahl
Lastmoment
Massenträg-
heitsmoment
Spannung
Volumenstrom
b
dt
³
Drehzahl-
Regler
Lage-
Regler
Ventil
Stell-
zylinder
Lage-
Sensor
v
K
s
K
i
K
M
.
p
DQ
dt
³
M
L
M
R
M
-
-
-
-
Tacho-
generator
M
B
n
ist
u
nsoll
u
nist
u
ssoll
u
sist
Q
1
J
i
M
B
M
R
M
K
M
p
DQ
Strom
Beschleuni-
gungsmoment
Reibmoment
Motormoment
Verhältnis Ver-
drängungsvolu-
men V zu s
K
Druck der
Druckquelle
Abb. 14.10 Drehzahlgeregelter verdrängergesteuerter Antrieb (Sekundärregelung). a Schaltung
b qualitatives Blockschaltbild der Regelung
Die Wirkungsweise ist am besten zu erkennen, wenn von einer Lastzunahme
'
M
L
, die sich auf die Drehzahl n
ist
bzw. die Winkelgeschwindigkeit
Z
ist
absenkend
auswirkt, ausgegangen und der Signalfluss verfolgt wird (
S
Z
/30
istist
n ). Um
die Drehzahl wieder anzuheben, muss das Hydromotormoment M vergrößert wer-
den. Dazu wird das Tachogeneratorsignal u
nist
mit dem Sollwert u
nsoll
verglichen
und die Differenz in einem elektro-hydraulischen Lageregelkreis (s. auch Abb.
14.8) in die erforderliche Vergrößerung des Verdrängungsvolumens des Hydro-
motors umgesetzt. Die Dynamik dieses Antriebes hängt wesentlich davon ab, wie
14.3 Kreisläufe mit Druckquellen konstanten Drucksollwertes 425
schnell die Verstellung des Hydromotorverdrängungsvolumens erfolgen kann. Zu
schnelle Schwenkbewegungen können zu Schäden im Hydromotor führen. Ge-
genüber dem Lageregelkreis in Abb. 14.8 ist der Stellzylinder mit Zentrierfedern
ausgerüstet. Ihre Aufgabe ist die Realisierung eines definierten Anfangswertes des
Hydromotorschwenkwinkels. Auf das Verhalten der Lageregelung haben sie nur
geringen Einfluss, da die Federkräfte i. Allg. viel kleiner als die Druckkräfte sind.
Ist der Lageregelkreis des Hilfsantriebes günstig dimensioniert, ist die Stabilität
der Drehzahlregelung relativ problemlos zu gewährleisten, da im äußeren Wir-
kungskreis nur noch ein Verzögerungseinfluss hinzukommt, das Gesamtmassen-
trägheitsmoment J von Rotor des Hydromotors und bewegter Last.
Problematischer ist die Beherrschung einer Lageregelung des Hydromotors, da
im Regelkreis eine weitere Integration hinzukommt (s. Abb. 14.11). Am besten
gelingt dies, wenn eine sogenannte Kaskadenstruktur aufgebaut wird, d. h., der
Regelung der Winkelposition wird eine Drehzahlregelung unterlagert.
a
s
u
P
T
TG
(Positionssollwert)
J
M
L
u
soll
u
nist
u
sist
n
ist
i
QQ
v
K
, s
K
PM
M
ist
M
u
ist
M
c
P
T
b
dt
³
Drehzahl-
regler
Lage-
Regler
Ventil
Stell-
zylinder
Lage-
Sensor
v
K
s
K
i
K
M
.
p
DQ
dt
³
M
L
M
R
M
-
-
-
-
Tacho-
generator
M
B
n
ist
u
nsoll
u
nist
u
ssoll
u
sist
Q
dt
³
M
ist
u
ist
M
Lage-
regler
u
soll
M
Positions-
Meßglied
-
durch digitalen Regler ersetzbar
1
J
Abb. 14.11 Lagegeregelter verdrängergesteuerter Antrieb (Sekundärregelung). a Schaltung
b qualitatives Blockschaltbild der Regelung c Anschluss eines Hydrotransformators
M
Winkel-
position, weitere Kurzzeichen s. Abb. 14.10

426 14 Projektierung und Gestaltung von Kreisläufen
Die Schaltung ändert sich dann gegenüber Abb. 14.10 a dahingehend, dass zu-
sätzlich zum bereits vorhandenen Tachogenerator ein Lagemessglied an die Welle
angeflanscht und das Winkelsignal auch in der Elektronik verarbeitet werden
muss. In Abb. 14.11 b ist das Blockschaltbild der Lageregelung dargestellt. Die
Parametereinstellung der nunmehr drei Regler sollte einem erfahrenen Regelungs-
techniker übertragen werden. Als Positionsmessglied wurde wie beim Drehzahl-
messglied ein analoges, eine Ausgangsspannung lieferndes, angenommen, um das
Darstellungsprinzip nicht verlassen zu müssen. Die meisten modernen Positions-
geber und viele Regler arbeiten digital. Das hat zur Folge, dass die Vergleichs-
glieder sowie die Lage- und Drehzahlregler zusammengefasst, der Sollwert als
Zahlenwert vorgegeben und das Drehzahlsignal aus dem Winkelsignal errechnet
werden können. Der Regelalgorithmus wird dann komplexer, aber es wird kosten-
intensive analoge Mess- und Steuerungstechnik eingespart (s. strich-punktiert um-
rahmter Bereich in Abb. 14.11 b). Unüblich ist die Realisierung einer Kraft-
regelung mit Hilfe der Verdrängersteuerung. Dies kann meist kostengünstiger mit
Steuerventilen im Hauptstrom realisiert werden, da Kraftantriebe keine großen
Ausgangsleistungen bereitstellen müssen.
Translatorische Bewegungen können mit Hilfe eines Hydrotransformators se-
kundärgeregelt werden [14.6]. Das Prinzip ist in Abb. 14.11 c oben dargestellt.
Der Aufwand ist sehr hoch, da ein geschlossener Kreislauf speziell gespeist wer-
den muss. Die in Abb. 14.11 c Mitte dargestellte Variante für Plunger ist weniger
aufwändig. In [14.7] wird ein Hydrotransformator beschrieben, der aus nur einem
Axialkolbensystem, dessen Steuerspiegel auf drei Öffnungen erweitert wurde, be-
steht (Symbol s. Abb. 14.11 c unten).
Seine Funktion entspricht der in Abb. 14.11 c Mitte. Der gerätetechnische
Aufwand ist in jedem Fall hoch, so dass der Einsatz eines Hydrotransformators
erst bei Zylindern mit hoher mechanischer Ausgangsleistung, z. B. in großen Bag-
gern, wirtschaftlich ist.
14.3.3 Druckquellen
Die wichtigste technische Forderung an eine Druckquelle ist: Die schwankenden
Volumenstromanforderungen der Antriebe müssen erfüllt werden, ohne dass der
Quellendruck p
DQ
unzulässig schwankt. Die wichtigsten ökonomischen Forderun-
gen lauten: Die Druckquelle darf nicht zu teuer sein und ihre Eigenverluste sind
niedrig zu halten, indem die Pumpe im Mittel gegen den Quellendruck p
DQ
nur so-
viel fördert, wie die Antriebe insgesamt fordern. In Abb. 14.12 sind Grund-
varianten von Druckquellen abgebildet, die die o. g. Forderungen unterschiedlich
gut erfüllen.
Die Anpassung des Volumenstromes Q
DQ
an den von den Antrieben ge-
forderten Wert erfolgt in allen Druckquellen innerhalb eines Regelkreises (s.
Blockschaltbild der Regelung in Abb. 14.2 b) in Abhängigkeit vom Quellendruck
p
DQ
, aber auf unterschiedliche Weise:
in einer Nullhubregelung durch eine Verstellpumpe (s. Abb. 14.12 a),
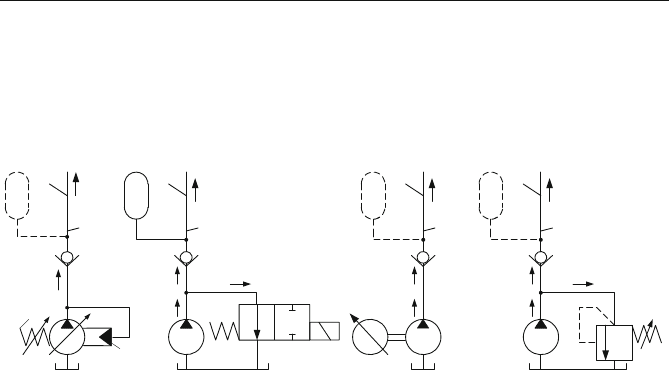
14.3 Kreisläufe mit Druckquellen konstanten Drucksollwertes 427
bei einer Abschaltpumpe durch ein druckabhängig geschaltetes Wegeventil
(Abb. 14.12 b),
durch einen drehzahlstellbaren Antriebsmotor (Abb. 14.12 c) oder
durch ein Druckbegrenzungsventil (Abb. 14.12 d).
P
6
Q
Ak
p
DQ
Q
DQ
Q
P
Q
VD
P
6
Q
Ak
p
DQ
Q
DQ
Q
P
Q
VW
P
6
Q
Ak
p
DQ
Q
DQ
= Q
P
F
0
A
St
M
P
6
Q
Ak
p
DQ
Q
DQ
Q
P
a b c d
Abb. 14.12 Grundvarianten von Druckquellen. a Nullhubregelung mit direkt beaufschlagter
Stelleinheit b Abschaltpumpe c Konstantpumpe mit drehzahlstellbarem Antriebsmotor d Kon-
stantpumpe mit Druckbegrenzungsventil
6
Q
Ak
Gesamtheit aller Volumenströme zu den Antrieben, Q
DQ
von der Druckquelle bereit-
gestellter Volumenstrom, Q
P
von der Pumpe geförderter Volumenstrom, Q
VW
über das Wege-
ventil abgeleiteter Volumenstrom, Q
VD
über das Druckbegrenzungsventil abgeleiteter Volumen-
strom, p
DQ
Druckquellendruck, A
St
Fläche Stelleinrichtung, F
0
Federvorspannkraft der
Stelleinrichtung
Nullhubregelungen. In Abb. 14.12 a ist eine Nullhubregelung mit direkt beauf-
schlagter Stelleinheit der Verstellpumpe dargestellt. Ab einem mit der Federvor-
spannung einstellbaren Wert werden mit wachsendem Quellendruck das Ver-
drängungsvolumen und damit der geförderte Volumenstrom verringert. Da sich
dieser Prozess in einem Regelkreis abspielt, wirkt die infolge wachsenden
Druckes p
DQ
erfolgte Volumenstromverringerung so auf den Druck p
DQ
zurück,
dass er wieder absinkt. Die Störung des Regelkreises erfolgt durch die Antriebe.
Wird durch Zuschalten eines Antriebs die von den Antrieben aktuell geforderte
Volumenstromsumme
6
Q
Ak
größer als der von der Verstellpumpe aktuell ge-
förderte Volumenstrom, sinkt der Druck ab. Die Druckkraft wird kleiner als die
Federkraft, die Stelleinheit schwenkt auf größeres Verdrängungsvolumen aus und
Q
DQ
erhöht sich auf den geforderten Wert Q
DQ
=
6
Q
Ak
.
In Abb. 14.13 sind diese Zusammenhänge spezieller als in Abb. 14.2 b dar-
gestellt. Die Pumpe mit Stelleinrichtung ist ein Feder-Masse-System mit der in
Abb. 14.13 b angegebenen nichtlinearen statischen Kennlinie Q
DQ
= f(p
DQ
). Erst
oberhalb des Druckes p
EB
= F
0
/A
St
setzt die Regelwirkung ein. Wachsender Druck
p
DQ
führt dann zur Verringerung des Volumenstromes Q
DQ
. Die Empfindlichkeit
der Pumpe mit Stelleinrichtung ist umso größer, je kleiner die Differenz p
DQ0
- p
EB