Will D., Gebhardt N. (Hrsg.) Hydraulik: Grundlagen, Komponenten, Schaltungen
Подождите немного. Документ загружается.

438 14 Projektierung und Gestaltung von Kreisläufen
ventils. Die Übertragungsfunktion des Zwei-Wege-Stromregelventiles lautet
damit:
sC
sp
sQ
sG
hVDVSZ
|
'
)(
)(
)(
1
mit
VD
VD
hVD
c
A
C
2
.
(14.4)
Die Eigenzeitkonstante T kann nach Gl. (14.3) berechnet werden, aber zu V
1
E
kommt C
hVD
, das die gleiche Größenordnung haben kann, hinzu.
Bei ablaufseitiger Drosselung (s. Abb. 14.18 d) befinden sich im Wirkungskreis
A
2
und V
2
, so dass sich s(s)/p
DQ
(s), T und D wie folgt errechnen (die Vorhaltzeit-
konstante T
v
entsteht hier durch die verzögerte Änderung von p
2
):
222
2
1
21
1
)(
)(
sTsDT
sT
ARs
A
sp
ss
v
h
DQ
mit
E
2
VRT
hv
,
2
2
A
Vm
T
E
und
E
22
2
1
V
m
AR
D
h
.
(14.5)
Die errechneten Werte für T sind mit denen in Abb. 14.19 vergleichbar (für
schwach gedämpfte Systeme ist T
P
| 2
S
T). Geringfügige Unterschiede resultie-
ren aus den zwei Modellansätzen (nichtlinear und linearisiert). Die in den
Abb. 14.18 a und b angegebenen Strukturen kommen auch bei der Verwendung
eines Proportional-Wegeventils anstelle von Wegeventil und Stromventil vor,
wenn Proportional-Wegeventile wie in Abb. 14.9 a und b verwendet werden. Die-
se Stetigsteuerventile erlauben die stetige Änderung ihrer Drosselstellen, so dass
weiche Anfahr- und Umsteuervorgänge durch entsprechende Fahrkurven, z. B.
Rampen, ohne Überschwingen der Drücke und Geschwindigkeiten realisiert wer-
den können.
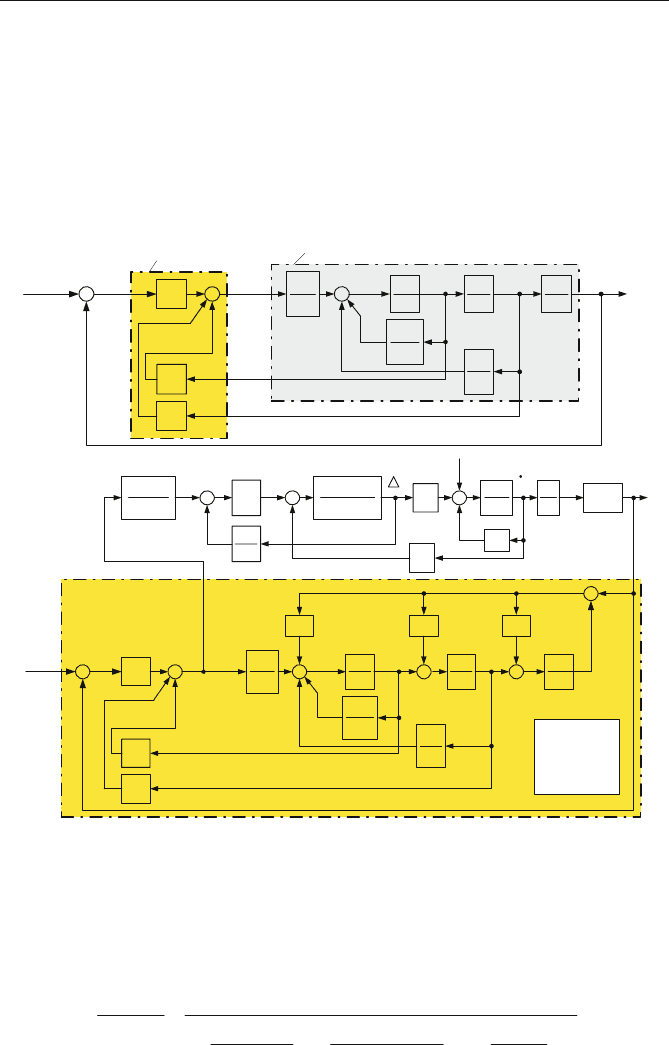
Lagegeregelte Antriebe mit Stetigsteuerventilen im Hauptstrom. Regelventile mit
ihren in der Mittellage des Schiebers sich stetig ändernden vier Drosselstellen
drosseln gleichzeitig sowohl zu- als auch ablaufseitig, was die lineare Be-
schreibung des Verhaltens in diesem Bereich erlaubt (s. Abschn. 4.6.1).
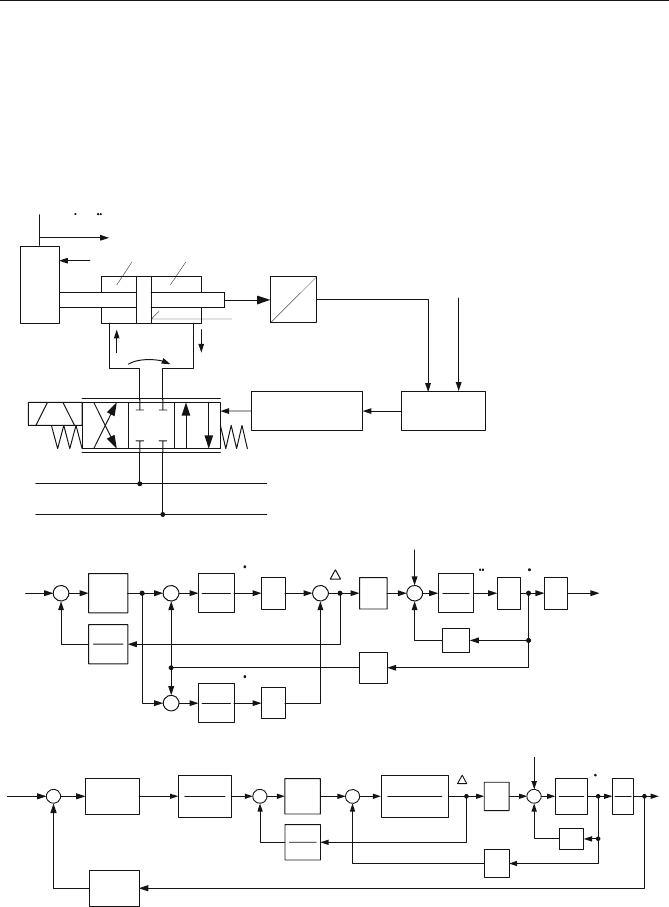
Die Struktur eines solchen Antriebes mit den für die Berechnung notwendigen
Parametern ist in Abb. 14.21 a dargestellt. Der Verbraucher ist aus Gründen der
einfacheren mathematischen Beschreibung des Antriebs ein Arbeitszylinder mit
beidseitiger Kolbenstange. Die Umsetzer ADU und DAU wurden nicht berück-
sichtigt. Die Unterschiede zwischen den jeweiligen Spannungen u
i
(t) und den ih-
nen entsprechenden Folgen u
ik
sind bei sehr kleinen Abtastzeiten T
0
. ver-
nachlässigbar gering. Dies vereinfacht die folgenden Berechnungen.
Abbildung 14.21 b zeigt das ausführliche lineare Blockschaltbild des mecha-
nisch-hydraulischen Teils (Herleitung und Anwendung der Druckverstärkung E
0
und der Stromverstärkung C
0
s. Abb. 4.38 und Gl. (4.101)). In den vier Integrati-
onsstellen
³
dt
entstehen die Ausgangsgrößen (die Zustandsgrößen) der vier vor-
handenen Energiespeicher [1419].
14.3 Kreisläufe mit Druckquellen konstanten Drucksollwertes 439
In Abb. 14.21 c wurden die zwei Druckvolumen-Energie-Speicher zu einem
zusammengefasst. (Die Volumina V
1
und V
2
wirken als parallele Federn und kön-
nen zu einer Gesamtnachgiebigkeit zusammengefasst werden, die immer kleiner
als die der weniger nachgiebigen Feder ist, so dass auch V* immer kleiner als das
kleinere der beiden Volumina ist.). Außerdem wurden die Integrationen durch den
Integrationsoperator 1/s ersetzt sowie die noch fehlenden Übertragungsglieder der
Regelungen hinzugefügt.
a
s
u
P
T
s
S
Lageregelung
Steuerschieber
m
s
K
, s
K
, s
K
F
L
u
Kist
V
1
V
2
A
K
u
Ssoll
u
Ksoll
Lageregler
Kolben
Lagesensor Kolben
p
2
p
1
'
p
QQ
b
C
0
1
E
0
A
K
1
m
k
F
L
F
R
Q
p
-
-
-
-
1
V
1
.
E
p
1
-
1
V
2
.
E
p
2
-
A
K
dt
³
s
K
s
K
dt
³
s
S
dt
³
dt
³
s
K
p
1
p
2
V
1
+V
2
(V
1
.
V
2
)
.
E
.
s
C
0
1
E
0
A
K
1
m
.
s
k
F
L
F
R
Q
p
-
-
-
-
A
K
s
K
s
S
s
K
1
s
K
FS
1+T
FS
s
u
Ssoll
G
RK
(s)
-
u
Ksoll
'
u
K
u
Kist
K
SensK
c
Abb. 14.21 Lagegeregelter Antrieb mit Regelventil im Hauptstrom. a schematische Darstellung
mit den für die Modellierung relevanten Signalen und Parametern
b linearisiertes Blockschaltbild
des mechanisch-hydraulischen Teils des Antriebes
c linearisiertes Blockschaltbild des gesamten
lagegeregelten Antriebs
440 14 Projektierung und Gestaltung von Kreisläufen
Die Übertragungsfunktion der Regelstrecke G
S
(s) = u
Kist
(s)/u
Ssoll
(s) ist für k = 0
in Gl. (14.6) angegeben. (Die Rückwirkung der geschwindigkeitsproportionalen
Komponente der Reibkraft ist gegenüber den anderen Rückwirkungen meist ver-
nachlässigbar.) Kennwerte dieses Antriebes sind ebenfalls die Eigenzeitkonstante
T oder ihr Reziprokwert Eigenkreisfrequenz
Z
e
sowie die Dämpfung D.
Aus
2
2
0
2
0
0
*
1
1
1)(
)(
)(
s
A
Vm
s
EA
Cm
sA
KC
sT
K
su
su
sG
KK
K
Ssens
FS
FS
Ssoll
Kist
S
E
mit
21
21
*
VV
VV
V
ergibt sich:
sT
sTsDT
s
K
sG
FS
IS
S
1
1
21
1
)(
22
mit
K
SsensFS
IS
A
KCK
K
0
,
A
Vm
T
E
*
,
E
*2
0
0
V
m
EA
C
D
.
(14.6)
In Abb. 14.22 a ist für folgende Parameterkombination die Reaktion der Ge-
schwindigkeit ds
K
/dt =
K
s
(nicht der Regelgröße U
Kist
, die erst nach einer weite-
ren Integration entsteht) auf einen U
Ssoll
-Sprung der Höhe 1 V abgebildet:
K
FS
= 0,4 mm/V, T
FS
= 0,5 ms, m = 200 kg, A = 8 cm
2
, p
DQ
= 200 bar,
C
0
= 200 cm
3
/(s mm), E
0
= 2000 bar/mm, V* = 80 cm
3
,
E
= 8 10
-5
bar
-1
,
K
Sens
= 1 V/cm.
Es sind der integrale Übertragungsfaktor
VVK
IS
/10
und die Eigenwerte
T = 4,47 ms und D = 0,035.
Die kleine Eigenzeitkonstante T zeigt, dass ein solcher Antrieb trotz einer rela-
tiv großen zu beschleunigenden Masse m schnell reagieren kann. Der Wert für die
Dämpfung D und der berechnete Geschwindigkeitsverlauf zeigen aber auch, dass
diese Antriebe (auch schon ungeregelt) nur schwach gedämpft sind.
Wird jetzt dieser Antrieb mit z. B. einem P-Regler
PRK
K
Ssoll
RK
K
u
u
sG
'
)(
la-
gegeregelt, verschärft sich dieses Problem noch, es sei denn, der Regler-
Übertragungsfaktor K
PRK
wird so klein eingestellt, dass die Regelgröße sich erst
dem Sollwert annähert, wenn die Schwingungen fast abgeklungen sind. Dann rea-
giert jedoch die Regelung sehr träge (s. Abb. 14.22 b, Führungs-Sprungantwort
der Regelgröße für den P-Regler mit K
PRK
= 0,6). Eine gewisse Verbesserung des
Verhaltens ist möglich, wenn im Regler zusätzlich ein Tiefpass realisiert wird:
sT
K
pG
TP
PRK
RK
1
)(
. Dies erlaubt eine moderate Vergrößerung von K
PRK
(in Abb.
14.22 b sind eine Zeitkonstante T
TP
von 20 ms und die Verdoppelung von K
PRK
auf 1,2 realisiert worden).
Der Hauptweg ist jedoch, einen Regler zu verwenden, der die extrem kleine
Regelstrecken-Dämpfung zu kompensieren gestattet. Dies gelingt am besten mit
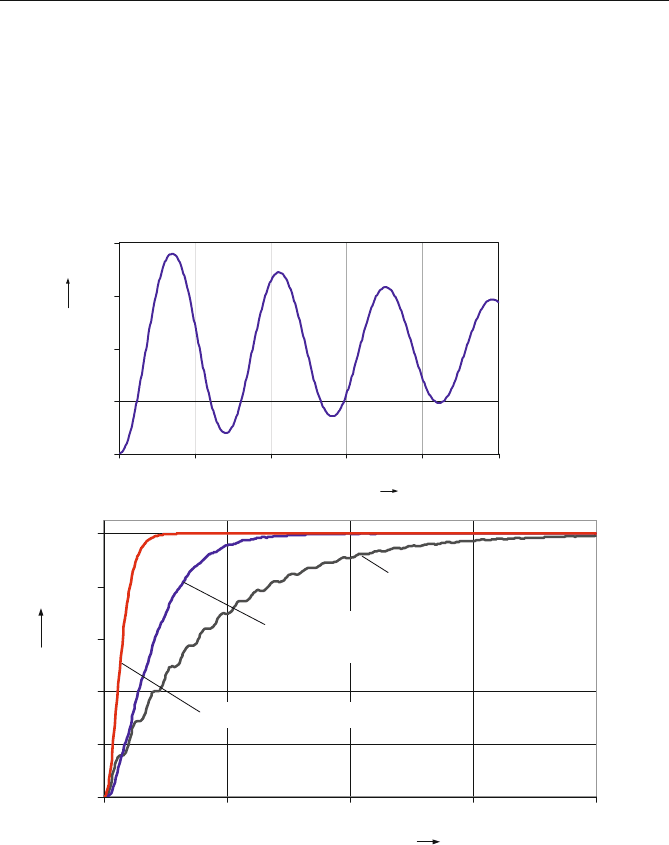
14.3 Kreisläufe mit Druckquellen konstanten Drucksollwertes 441
einer Zustandsregelung (s. Abb. 14.22 b, Führungs-Sprungantwort der Regelgröße
für einen noch zu beschreibenden Zustandsregler). Aus Gl. (14.6) geht hervor,
dass die Regelstrecke ein integrierendes Verhalten mit Verzögerung 2. Ordnung
besitzt, wenn die relativ kleine Zeitkonstante T
FS
zunächst vernachlässigt wird.
Dies führt auf drei Zustandsgrößen; das sind physikalische Größen, die in den
Energiespeichern des Systems (Druck-Volumenenergie Æ Druck, kinetische
Energie Æ Geschwindigkeit, potentielle Energie Æ Weg) entstehen.
a
ds
K
/dt
0
5
10
15
20
0 0,02 0,04 0,06 0,08 0,1
cm/s
t
s
b
0
0,2
0,4
0,6
0,8
1
0 0,2 0,4 0,6 0,
8
u
Kist
V
t
s
P-Regler
P-Regler mit Tiefpass
1. Ordnung (PT1-Glied)
Zustandsregler 3. Ordnung
Abb. 14.22 Lagegeregelter Antrieb mit Regelventil im Hauptstrom. a Reaktion der Ge-
schwindigkeit ds
K
/dt auf einen U
Ssoll
-Sprung der Höhe 1 V b Führungs-Sprungantworten der
Regelgröße für drei unterschiedliche Regler (Simulationsergebnisse mit der Software WinFACT
[14.9])
Die recht komplizierten Regelalgorithmen werden mit Hilfe moderner digitaler
Elektronik beispielsweise in einem Mikrocontroller abgearbeitet. Das Prinzip ist,
1. das Modell der Regelstrecke in die sogenannte Regelungs- oder Frobenius-
Normalform zu bringen (im folgenden Beispiel so, dass die Regelgröße die
442 14 Projektierung und Gestaltung von Kreisläufen
erste Zustandsgröße q
1
ist und ihre Ableitungen nach der Zeit die weiteren:
KistKistKist
uququq
321
) und
2. jede Zustandsgröße q
i
so durch einen Faktor r
i
zu bewerten, dass die ge-
wünschte Führungsübertragungsfunktion der Regelung entsteht.
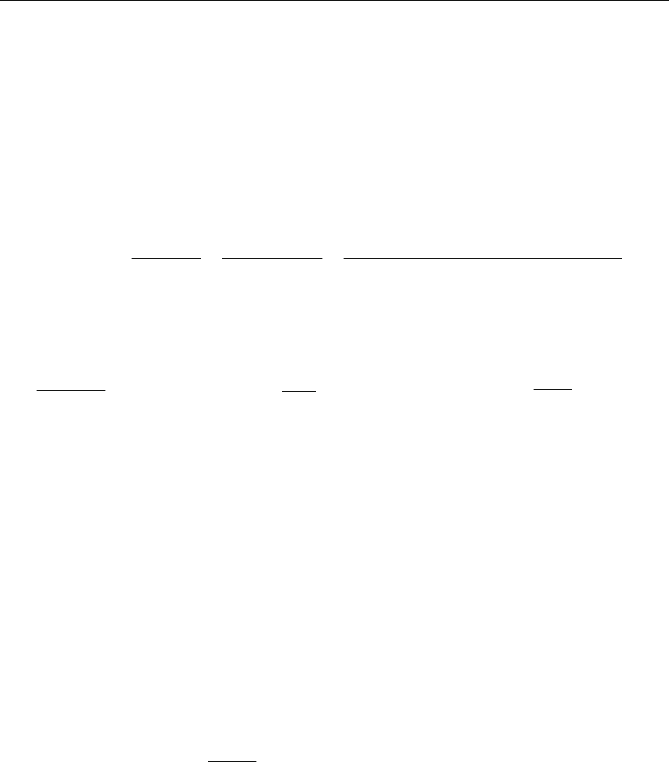
In Abb. 14.23 a ist die Struktur der Regelung dargestellt. Das Zustandsmodell
der Regelstrecke hat natürlich (bei - s. oben - vernachlässigter Zeitkonstante T
FS
)
ebenfalls die Übertragungsfunktion nach Gl. (14.6).
a
K
IS
T
2
1
s
q
3
q
3
.
2DT
T
2
1
s
1
s
q
2
q
1
=u
Kist
-
-
1
T
2
u
Ssoll
--
r
2
r
3
r
1
u
Ksoll
'
u
K
-
Zustands-Regler
q
3
q
2
Zustandsmodell der Regelstrecke
b
V
1
+V
2
(V
1
.
V
2
)
.
E
.
s
C
0
1
E
0
A
K
1
m
.
s
k
F
L
F
R
Q
-
-
-
-
A
K
s
K
s
S
s
K
1
s
K
FS
1+T
FS
s
u
Ssoll
u
Kist
K
SensK
K
IS
T
2
1
s
q
3
*q
3
*
.
2DT
T
2
1
s
1
s
q
2
*
q
1
*
-
-
1
T
2
u
Ssoll
--
r
2
r
3
r
1
u
Ksoll
'
u
K
-
q
3
q
2
p
Ko
1
Ko
3
Ko
2
-
Zustands-
Regler +
Vergleicher
Abb. 14.23 Zustandsgeregelter lagegeregelter Antrieb mit Regelventil im Hauptstrom. a Grund-
struktur der Zustandsregelung
b Berechnung der Zustandsgrößen q
2
und q
3
aus dem Zustands-
modell der Regelstrecke mit Hilfe der digitalen Reglerelektronik und Nachführung der Zustands-
größen des Modells im Vergleich mit der realen Regelstrecke
Die sich ergebende Führungsübertragungsfunktion G
F
(s) lautet:
3
1
2
2
1
3
1
2
21
1
1
)(
)(
)(
s
Kr
T
s
Kr
KrDT
s
Kr
Kr
su
su
sG
ISIS
IS
IS
IS
Ksoll
Kist
F
(14.7)
14.3 Kreisläufe mit Druckquellen konstanten Drucksollwertes 443
G
F
(s) ist relativ einfach zu berechnen, wenn die beiden inneren Summations-
stellen in Abb. 14.23 a zu einer vereinigt werden. Da alle drei Koeffizienten des
Nenners der Führungsübertragungsfunktion voneinander unabhängig mit Hilfe der
Reglerfaktoren r
1
, r
2
, r
3
eingestellt werden können, kann die Dynamik dieser
Regelung fast nach Wunsch festgelegt werden. Die Ziel-Führungsübertragungs-
funktion könnte z. B. ein annähernd proportionales Verhalten mit der der Rege-
lung entsprechenden Ordnung der Verzögerung und gleichgroßen (gewünschten)
reellen Regelkreiszeitkonstanten T
RK
haben (es sind aber viele andere Varianten
denkbar):
33223
331
1
1
1
)(
)(
)(
sTsTsT
sT
su
su
sG
RKRKRK
RK
Ksoll
Kist
FZiel
.
Über den Koeffizientenvergleich sind die erforderlichen Werte für die r
i
zu er-
mitteln. Für das Antriebsbeispiel sind das bei einer beispielsweise gewünschten
Zeitkonstante T
RK
= 10 ms:
2
3
2
1
|
RKIS
TK
T
r
,
ms
K
rTr
IS
RK
40
1
3
12
|
,
2
1
2
3
568
2
3 ms
K
DT
rTr
IS
RK
|
Mit diesen Parametern ergibt sich die Führungs-Sprungantwort der Regelgröße
für die Zustandsregelung in Abb. 14.22 b.
Ein Problem ist i. Allg. die Ermittlung der Zustandsgrößen q
2
und q
3
. Sie könn-
ten im Prinzip innerhalb der Reglerelektronik durch numerische Differenziation
aus
Kist
uq
1
gewonnenen werden, das führt jedoch bei hochfrequenten Rausch-
anteilen auch schon kleinster Amplituden in
Kist
uq
1
zu großen Auswirkungen
in q
2
und vor allem in q
3
, da bei Differenziationen die Amplituden proportional
mit den Frequenzen wachsen. Die gebräuchlichste Methode ist die Realisierung
des Zustandsmodells der Strecke in der digitalen Reglerelektronik und die Nach-
führung seiner Zustandsgrößen q
i
* mit Hilfe der Korrekturfaktoren Ko
i
im Ergeb-
nis des Vergleichs der realen Regelgröße u
Kist
und der Ausgangsgröße des Modells
q
1
*. Dies ist ausführlich in Abb. 14.23 b dargestellt. Die Integrationen werden na-
türlich numerisch durchgeführt, die Übertragungsfunktionen 1/s werden zu den z-
Übertragungsfunktionen
1
0
1
z
T
. Die Nachführung der Zustandsgrößen q
i
* ist aus
mehreren Gründen wichtig:
Die Parameter der realen Regelstrecke und seines Zustandsmodells stimmen an
unterschiedlichen Arbeitspunkten nur annähernd überein.
Die Vernachlässigung der Zeitkonstante T
FS
führt auch zu partiell unterschied-
lichem Veralten der realen Regelstrecke und seines Zustandsmodells.
Vor allem kann eine allgemeine Belastungskraft F
L
in das Zustandsmodell nicht
aufgenommen werden, dazu müsste sie speziell gemessen werden. Was ein-
fließen könnte, wäre die konstante Hangabtriebskraft eines stationären Schräg-
antriebs oder eines Senkrechtantriebs.
Sekundärgeregelte Antriebe. In den Abb. 14.10 und 14.11 sind qualitative Block-
schaltbilder dieser Antriebe angegeben. Vereinfachte linearisierte Blockschalt-
bilder enthält Abb. 14.24.
444 14 Projektierung und Gestaltung von Kreisläufen
a
K
RD
K
M
S
1
J
dt
³
M
L
p
DQ
n
ist
n
soll
-
s
soll
s
K
M
B
1
1+ T
HA
s
V
1
1+ T
HA
s
s
soll
s
K
b
c
1
1+ 2DTs + T
2
s
2
K
RL
n
soll
-
soll
M
dt
³
M
L
M
ist
n
ist
V Verdrängungsvolumen
J Massenträgheitsmoment
K
RD
, K
RL
Übertragungsfaktor des
jeweiligen P-Reglers
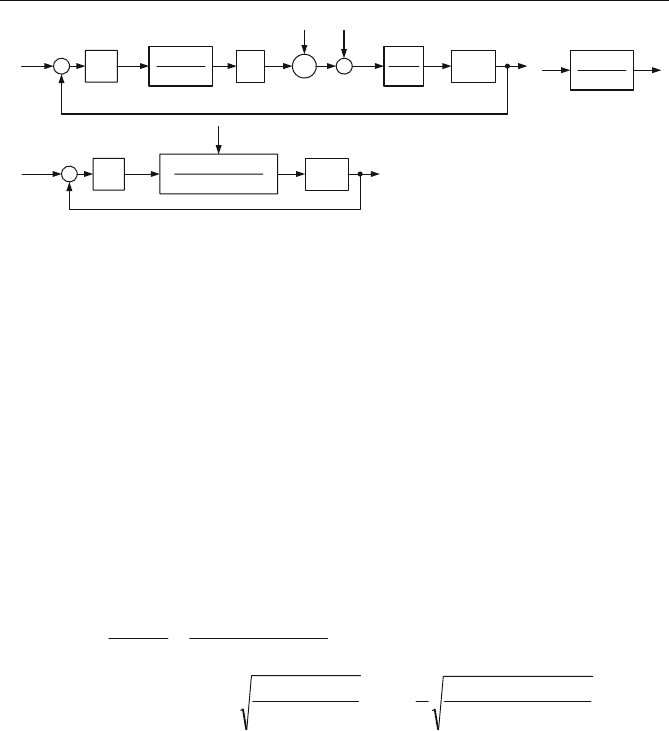
Abb. 14.24 Blockschaltbilder verdrängergesteuerter Antriebe. a Drehzahlregelung mit P-Regler
b Modell des Hilfsantriebs c Lageregelung mit P-Regler (Drehzahlregelung als unterlagerter Re-
gelkreis)
Der Hilfsantrieb ist lagegeregelt. Sein Regler wird so ausgelegt, dass die Stell-
bewegungen des Verdrängers im Hydromotor nur so schnell wie zulässig erfolgen
können. Es kann vorausgesetzt werden, dass die übrigen Verzögerungen im Hilfs-
antrieb vernachlässigt werden können, so dass proportionales Verhalten mit Ver-
zögerung 1. Ordnung diesen Hilfsantrieb ausreichend genau beschreibt (s. Abb.
14.24 b). Wird zusätzlich das Reibmoment M
R
in erster Näherung vernachlässigt,
entsteht das Blockschaltbild der Drehzahlregelung in Abb. 14.24 a. Wird die
Drehzahlregelung mit einem P-Regler realisiert und es kann p
DQ
= konst. an-
genommen werden, dann besitzt sie proportionales Verhalten mit Verzögerung
2. Ordnung, wie die folgende Berechnung der Führungsübertragungsfunktion
G
F
(s) zeigt:
22
21
1
)(
)(
)(
sTsDT
sn
sn
sG
soll
ist
F
mit
DQMRD
HA
pKK
TJ
T
,
HADQMRD
TpKK
J
D
2
1
.
(14.8)
Bei großem Reglerübertragungsfaktor K
RD
reagiert die Regelung schnell (T ist
klein), aber die Dämpfung D kann zu klein werden. Die Lageregelung (s. Abb.
14.24 b) hat Verhalten mindestens 3. Ordnung, für diese Reglung besteht damit
die Gefahr der Instabilität.
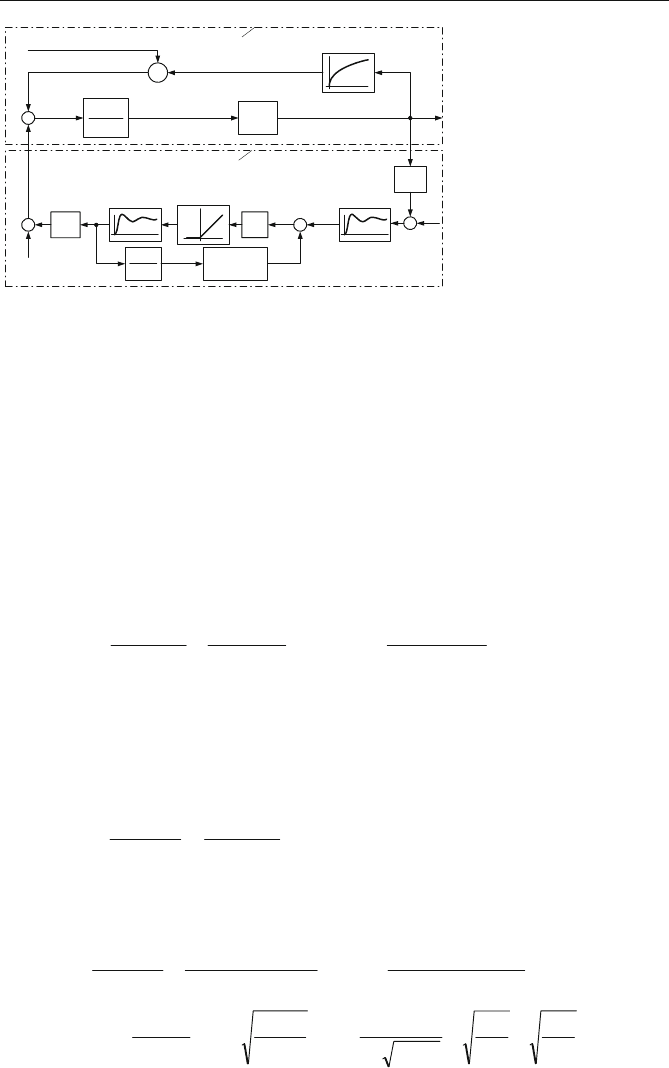
14.3.5.2 Das Verhalten der Druckregelungen
Nullhubregelung. Die Wirkungsweise ist in Abschn. 14.3.3 näher beschrieben
worden (s. Abb. 14.14). Es ist zu beachten, dass sowohl der Druckfühler als auch
die Stelleinrichtung der Pumpe Feder-Masse-Systeme sind. Ein für Berechnungen
des dynamischen Verhaltens geeignetes Blockschaltbild zeigt Abb. 14.25. Die
Rückwirkung innerhalb der Regeleinrichtung kennzeichnet die Bewegungs-
dämpfung durch einen hohen hydraulischen Innenwiderstand R
hDF
des Druck-
fühlers.
14.3 Kreisläufe mit Druckquellen konstanten Drucksollwertes 445
p
DQ
Q
DQ
Pumpe mit Stelleinrichtung und Druckfühler
A
St
K
P
F
0
-
F
s
St
Q
Pmax
-
A
DF
Druckregelstrecke
p
DF
R
hDF
.
A
St
-
p
DFL
d
dt
1
C
hges
dt
³
p
DQ
-
Q
gesp
dp
DQ
/dt
6
Q
Ak
S
A
Drges
p
DFL
Druck-
fühleraus-
gangsdruck bei
Leerlauf,
K
P
Pumpen-
kennwert,
R
hDF
Innen-
widerstand des
Druckfühlers
Abb. 14.25 Quantitatives Blockschaltbild einer Nullhubregelung mit steiler Charakteristik
Die Druckregelung in Abb. 14.25 kann an kritischen Arbeitspunkten instabil
werden, vor allem wenn alle Antriebe abgeschaltet werden und R
hges
of geht.
Verhindert wird dies vom Pumpenkonstrukteur durch weit auseinanderliegende
Zeitkonstanten der Regeleinrichtung. (Sollten trotzdem Druckdauerschwingungen
infolge Instabilität entstehen, können diese i. Allg. durch zusätzliche Speicher be-
seitigt werden [14.4, 14.8].)
Durch den hohen Innenwiderstand R
hDF
wird erreicht, dass für Übergangsvor-
gänge nur die dominierende Zeitkonstante T
RE
berücksichtigt werden muss. Die
Regeleinrichtung kann dann mit folgender Übertragungsfunktion G
RE
(s) be-
schrieben werden (aus Abb. 14.13 b und c ist K
RE
leicht abschätzbar):
sT
K
sp
sQ
sG
RE
RE
DQ
DQ
RE
'
1)(
)(
)(
mit
EBDQ
P
RE
pp
Q
K
|
0
max
.
(14.9)
Die durchgängig linearisierte Beschreibung der Druckregelstrecke wäre eine rela-
tiv grobe Näherung, da
6
Q
Ak
und 1/R
hges
sich annähernd proportional ändern, so
dass in Abb. 14.25 Gl. (8.6) angesetzt wurde mit einer Gesamtdrosselfläche aller
Antriebe
A
Drges
. An einem Arbeitspunkt (R
hges
= p
DQ
/Q
DQ
und C
hges
sind hier Kon-
stanten) kann sie als Glied mit Verzögerung 1. Ordnung beschrieben werden:
sT
R
sQ
sp
sG
S
hges
DQ
DQ
S
1)(
)(
)(
mit
hgeshgesS
CRT
.
(14.10)
Die Übertragungsfunktion des Regelkreises bei Volumenstromstörung ergibt sich
damit zu (
V
0
= R
hges
K
RE
ist die statische Kreisverstärkung des Regelkreises):
22
21
1
)()(1
)(
)(
)(
)(
sTsDT
sT
K
sGsG
sG
sQ
sp
sG
RE
RK
RES
S
Ak
DQ
z
'
(14.11)
mit
¸
¸
¹
·
¨
¨
©
§
RE
S
S
RE
SRE
hges
RK
T
T
T
T
V
D
V
TT
T
V
R
K
0
00
12
1
,
1
,
1
.
446 14 Projektierung und Gestaltung von Kreisläufen
Der hydraulische Gesamtwiderstand R
hges
, der Quotient aus p
DQ
und Q
DQ
, geht in
die Parameter
T und D ein. Während p
DQ
annähernd konstant bleibt, schwankt Q
DQ
in einem großen Bereich von Q
Pmin
(alle Antriebe sind abgeschaltet, nur Steuer-
und Leckvolumenströme treten noch auf) bis
Q
Pmax
(bestimmt vom Maximalför-
deranschlag der Pumpe). Abbildung 14.24 zeigt Simulationsergebnisse des Mo-
dells in Abb. 14.25 (es wurde nur die dominierende Zeitkonstante der Regel-
einrichtung berücksichtigt).
a
0
20
40
60
80
100
0 102030405060
p, Q
t
s
p
DQ
in bar
Q
soll
in dm
3
/min
Q
DQ
in dm
3
/min
C
hges
=
400
10³ mm
5
/N
Antriebe wege-
ventilgesteuert
b
0
40
80
120
0 102030405060
p, Q
t
s
p
DQ
in bar
Q
soll
in dm
3
/min
Q
DQ
in dm
3
/min
C
hges
=
40
10³ mm
5
/N
Antriebe wege-
ventilgesteuert
c
0
20
40
60
80
100
0 102030405060
p, Q
t
s
p
DQ
in bar
Q
soll
in dm
3
/min
Q
DQ
in dm
3
/min
C
hges
=
40
10³ mm
5
/N
Antriebe nach Fahr-
kurven (ver-
schliffenen Rampen)
stetiggesteuert
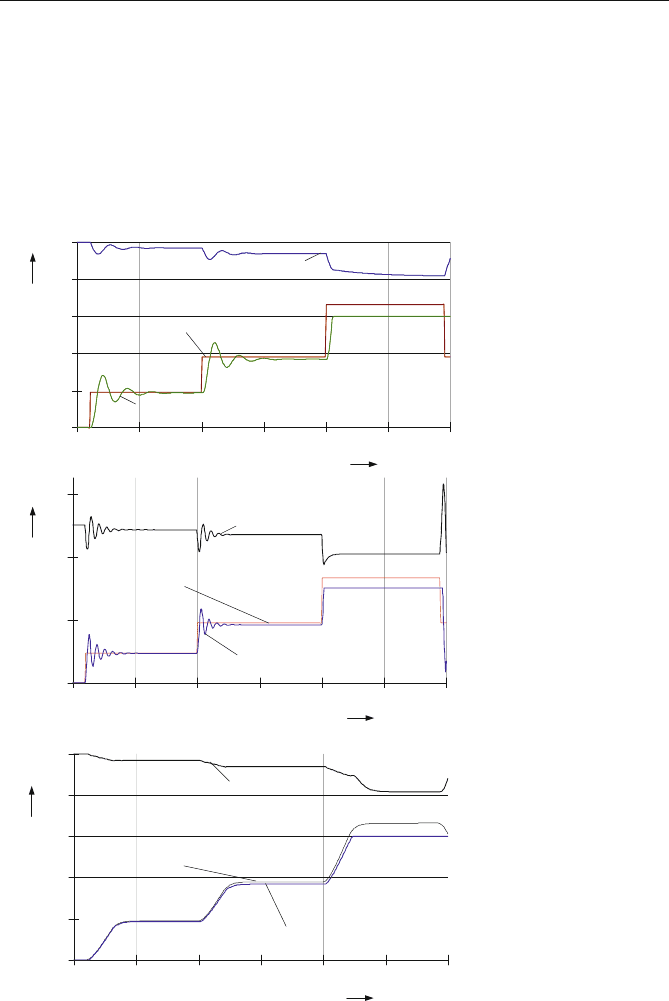
Abb. 14.26 Druck- und Volumenstromverläufe in einer nullhubgeregelten Hydraulikanlage (Si-
mulationsergebnisse mit WinFACT [14.9])

14.3 Kreisläufe mit Druckquellen konstanten Drucksollwertes 447
Folgende Parameter wurden verwendet:
Pumpe mit Stelleinrichtung: p
DQ0
= 100 bar; Q
Pmax
= 60 l/min (= 10
6
mm
3
/s)
und
p
DQ0
- p
EB
= 10 bar führen auf K
RE
| 10
6
mm
5
/(s·N); T
RE
= 1 s.
Druckregelstrecke: C
hges
= 40010³ mm
5
/N bzw. 4010
3
mm
5
/N (erreichbar mit
einem 10- bzw. einem 1-
l-Speicher, s. Kap. 9). Die Arbeitspunkte liegen bei
etwa 30 %, 60 % und bei >100 % von
Q
Pmax
.
In Abb. 14.26 a und b werden die Arbeitspunkte (Lage etwa wie in Abb. 14.14 c)
sprungförmig angefahren, d. h., die Verbraucher werden mit Wegeventilen ge-
schaltet. Die ablesbaren Periodendauerwerte der Übergangsvorgänge sind
T
P
| 4 s
und T
P
| 1,3 s. Die Dämpfung ist bei der kleineren Speicherkapazität deutlich
kleiner. Sehr hohe Druckspitzen entstehen hier beim Übergang von der Phase des
zu großen Volumenstrombedarfs in den Regelbereich.
Die Kennwerte nach Gl. (14.10) und Gl. (14.11) stimmen mit den Simulations-
ergebnissen überein. Geringe statische und dynamische Druckschwankungen set-
zen eine geringe Differenz
p
DQ0
- p
EB
(s. Abb. 14.13 b und c) und hohe Speicher-
kapazität
C
hges
voraus. Praktische Messungen bestätigen diese Aussagen [14.4,
14.8]. Ungünstiges Verhalten entsteht, wenn
C
hges
klein und R
hges
groß ist. Starke
Druckschwankungen sind dann nur zu vermeiden, wenn sich der Gesamtwider-
stand
R
hges
nur langsam ändert, d. h. keine schaltenden Wegeventile in den An-
trieben eingesetzt werden und zusätzlich die Stetigsteuerventile ihre Querschnitte
nur nach Rampen oder sogenannten Fahrkurven ändern (s. Abb. 14.26 c).
Abschaltpumpe. Kleine Schaltpunktabstände und gleichzeitig sehr große Spei-
cherkapazität sind Voraussetzungen für Druckschwankungen geringer Amplitude
und Frequenz
f dieser Zweipunktregelung (s. Abb. 14.15 b: f ist am höchsten,
wenn gilt:
6
Q
Ak
|
Q
P
/2). Dann ist der Betrag der Druckänderungsgeschwindigkeit
_dp
DQ
/dt_ in den Phasen Druckzunahme und Druckabnahme gleich groß. Mit
hges
P
C
Q
p
2/
ergibt sich
)(22
1
max
DSuDSohges
P
ppC
Q
t
f
'
.
(14.12)
Oft wird f
max
nur überprüft; in einigen Fällen werden aus gegebenen bzw. ge-
forderten Werten für Q
P
, p
DSo
, p
DSu
und
'
t die notwendige Kapazität C
hges
er-
rechnet und daraus die erforderlichen Speicher bestimmt (s. Kap. 9).
Drehzahlveränderliche Konstantpumpe. Ihr dynamisches Verhalten wird vor-
rangig vom elektrischen Antrieb bestimmt. Aus Gründen der Stabilität wird auch
hier die Regeleinrichtung (s. Abb. 14.16) so ausgelegt, dass sie eine dominierende
Zeitkonstante besitzt. Wenn ein P-Regler zum Einsatz kommt, kann sie nähe-
rungsweise analog zu Gl. (14.9) als proportional wirkendes Übertragungsglied mit
Verzögerung 1. Ordnung beschrieben werden. Die Druckquelle hat dann ähnliches
dynamisches Verhalten wie die soeben beschriebene Nullhubregelung mit steiler
Charakteristik. Mit einem PI-Regler wird der statische Regelfehler zu null; seine
Parametrierung ist jedoch schwierig, da der I-Anteil die Gefahr der Instabilität
dieser Regelung vergrößert.