Baker K.R. Optimization Modeling with Spreadsheets
Подождите немного. Документ загружается.

for 64-bit Risk Solver Platform, named RSPSetup64.exe. In all other cases, you’ll
download and run RSPSetup.exe. Running the Setup program is straightforward,
but you’ll need to pay attention to three prompts.
1. You’ll be asked for an installation password. This will be emailed to you, at the
email address you give when you fill out the registration form.
2. You’ll be asked for a license activation code. This appears in the same email as
the installation password; it determines whether you’ll be using full RSP for 15
days, RSPE for 140 days, or something else.
3. You’ll be asked whether you want to run initially as full Risk Solver Platform,
or a subset product. There are several choices, but for use with this book, the
recommended selection is Premium Solver Platform. (You can change this
selection later, using Help—About on the RSP/PSP Ribbon.)
To uninstall the software, you can either re-run RSPSetup.exe, or use the Windows
Add/Remove Programs feature.
A1.2. SUPPLEMENTAL EXCEL FILES
This book is supported by a website that contains supplementary files. The URL for
the website is http://mba.tuck.dartmouth.edu/opt/. Specifically, the website contains
a collection of Excel files corresponding to all of the spreadsheet exhibits in the book.
This collection is not intended merely for backup purposes: you are encouraged to
open these files while reading the text and to explore them carefully. This exploration
provides a hands-on feel for the examples in the text and potentially serves as a tem-
plate for other, similar problems.
A second collection of Excel files contains data sets for selected end-of-chapter
exercises and cases. The data sets are provided for situations in which it would be
tedious to enter all the data into an Excel file for the purpose of working on the
exercise.
Some of the cases contain references to an existing spreadsheet model. The web-
site also contains Excel files for these models.
376
Appendix 1 Optimization Software and Supplemental Files

Appendix 2
Graphical Methods in Linear
Programming
We can use graphical methods to solve linear optimization problems involving two
variables. When there are two variables in the problem, we can refer to them as x
1
and x
2
, and we can do most of the analysis on a two-dimensional graph. Although
the graphical approach does not generalize to a large number of variables, the basic
concepts of linear programming can all be demonstrated in the two-variable context.
When we run into questions about more complicated problems, we can ask, what
would this mean for the two-variable problem? Then, we can look for answers in
the two-variable case, using graphs.
Another advantage of the graphical approach is its visual nature. Graphical
methods provide us with a picture to go with the algebra of linear programming,
and the picture can anchor our understanding of basic definitions and possibilities.
For these reasons, the graphical approach provides useful background for working
with linear programming concepts.
A2.1. AN EXAMPLE
Consider the planning and scheduling problem facing a manufacturer of microwave
ovens with two models in its line—the standard and the deluxe. Each oven is
assembled from component parts and subassemblies that are produced in the mechan-
ical and electronics departments. The following table shows the number of production
hours per oven required in each department and the capacities of the three production
departments, in monthly hours.
Standard (h/oven) Deluxe (h/oven) Capacity (h/mo)
Assembly Department 4 4 560
Mechanical Department 3 2 400
Electronics Department 2 4 400
Optimization Modeling with Spreadsheets, Second Edition. Kenneth R. Baker
# 2011 John Wiley & Sons, Inc. Published 2011 by John Wiley & Sons, Inc.
377
The sales department believes that there will be demand for as many ovens as the
company can produce. The accounting department has determined that the variable
profit contributions are $50 for each standard and $40 for each deluxe. The problem
is to determine a production plan to maximize monthly profit contribution.
Our first step in analyzing this problem is to express it algebraically. The problem
of devising an output plan boils down to finding the best number of standard ovens and
deluxe ovens for the firm to produce in the coming month. Thus, we let
x
1
¼ number of standard ovens
x
2
¼ number of deluxe ovens
Once we determine the values of x
1
and x
2
, the problem will be solved. Furthermore,
the criterion is to maximize the profit contribution generated by our plan. In particular,
we can write our objective function as
Maximize z ¼ 50x
1
þ 40x
2
where z represents the value of the objective function.
Having specified decision variables and an objective function, we turn our atten-
tion to the constraints of the problem, the limited capacities in the assembly, mechan-
ical, and electronics departments. In assembly, the number of hours consumed by a
production schedule cannot exceed the 560 hours available. We can write this require-
ment algebraically as
4x
1
þ 4x
2
560
Similarly, for the mechanical and electronics departments, we require
3x
1
þ 2x
2
400
2x
1
þ 4x
2
400
In standard form, an algebraic statement of our full model is
Maximize z ¼ 50x
1
þ 40x
2
subject to 4x
1
þ 4x
2
560 (A)
3x
1
þ 2x
2
400 (M)
2x
1
þ 4x
2
400 (E)
Finally, implicit in our definition of the two decision variables is the requirement that
they must both remain nonnegative (x
1
0 and x
2
0).
We begin the graphical analysis with the constraints. For a graphical approach, we
can work with equations more readily than inequalities, so we consider the equations
corresponding to each of the constraints in turn. For the assembly department con-
straint (A), the line 4x
1
þ 4x
2
¼ 560 defines the locus of all points at which the depart-
ment is fully utilized. That is, the line represents the set of product mix combinations
378
Appendix 2 Graphical Methods in Linear Programming
(x
1
, x
2
) that consume all 560 available hours in assembly. To plot the line, note that the
x
1
intercept is 140 (obtained by setting x
2
¼ 0 and solving the equation for x
1
).
Similarly, the x
2
intercept is 140. Plotting the two intercepts, (140, 0) and (0, 140)
on a graph, and connecting the two points with a straight line, we construct the plot
shown in Figure A2.1, where the label A on the graph is used to associate this line
with the assembly hours constraint.
The line plotted in Figure A2.1 represents all combinations (x
1
, x
2
) that consume
exactly 560 hours of assembly time. Our model, however, looks for combinations that
consume no more than 560 hours. Combinations that consume fewer that 560 hours
are also admissible, and these correspond to points (x
1
, x
2
) that lie below the line.
In fact, if we consider only the points that are admissible in the assembly constraint
and that also meet the nonnegativity requirements, then we are left with the shaded
triangle shown in Figure A2.1.
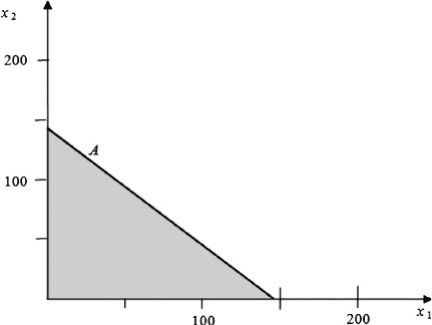
Next, we plot a line corresponding to mechanical department hours, or 3x
1
þ
2x
2
¼ 400, as shown in Figure A2.2 with the label M. Points on this line represent
combinations of standard and deluxe ovens that consume exactly 400 hours of mech-
anical time, and points below the line consume fewer than 400 hours. The line corre-
sponding to the mechanical department has a slope of – 3/2, in comparison to the
assembly department line, which has a slope of –1. Only points that lie below both
constraint lines (and in the nonnegative region) are admissible decisions, as indicated
by the shading.
Finally, we plot a line corresponding to the electronic department limit, 2x
1
þ
4x
2
¼ 400, shown in Figure A2.3 with the label E. This line has a slope of –1/2,
and again we shade the region that lies below all three of the lines, as shown in
figure. The shaded region now represents the set of all points that are admissible
decisions: They satisfy all of the constraints in our problem.
The shaded area in Figure A2.3 is called the feasible region. It is a five-sided poly-
gon containing, along its boundary or inside, all of the points that correspond to
Figure A2.1. Sketch of first
constraint.
A2.1. An Example 379
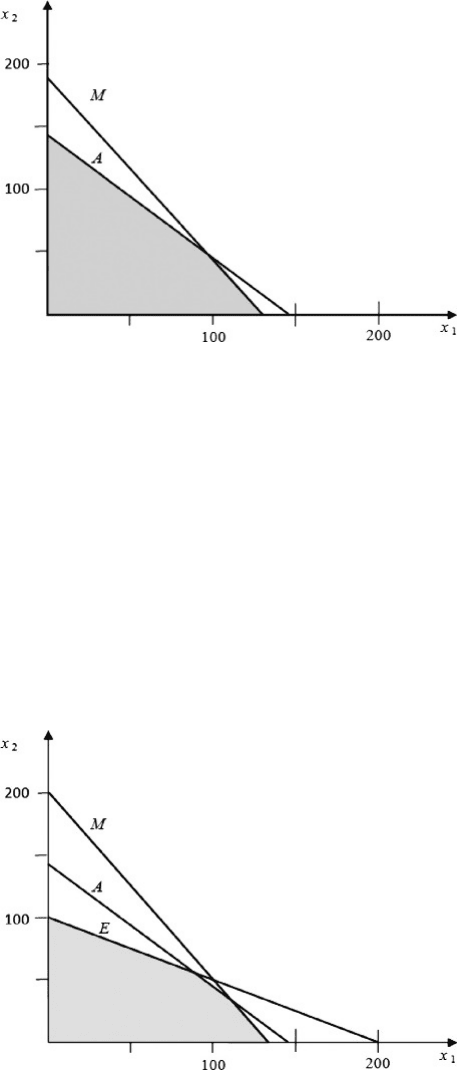
feasible decisions in our model. Our next step is to find the best value of the objective
function that can be achieved by a point in this feasible region.
To pursue this search, consider what happens when we set the objective function
(z) equal to a fixed value. For example, suppose z ¼ 2000. Then all points (x
1
, x
2
) that
achieve a value of 2000 in the objective function lie on the line 50x
1
þ 40x
2
¼ 2000.
Furthermore, all points that achieve a value of 2000 and that are feasible in the con-
straints lie along this line and within the feasible region. Consider a second line cor-
responding to z ¼ 4000. Like the first objective function line, this one has a slope of
–5/4, so it is parallel to the first. However, it has different intercepts and lies above and
to the right of the first line, as shown in Figure A2.4. From these two lines, we can
imagine an entire family of lines, each with a slope of – 5/4 and each corresponding
Figure A2.2. Sketch of
second constraint.
Figure A2.3. Sketch of
third constraint.
380 Appendix 2 Graphical Methods in Linear Programming
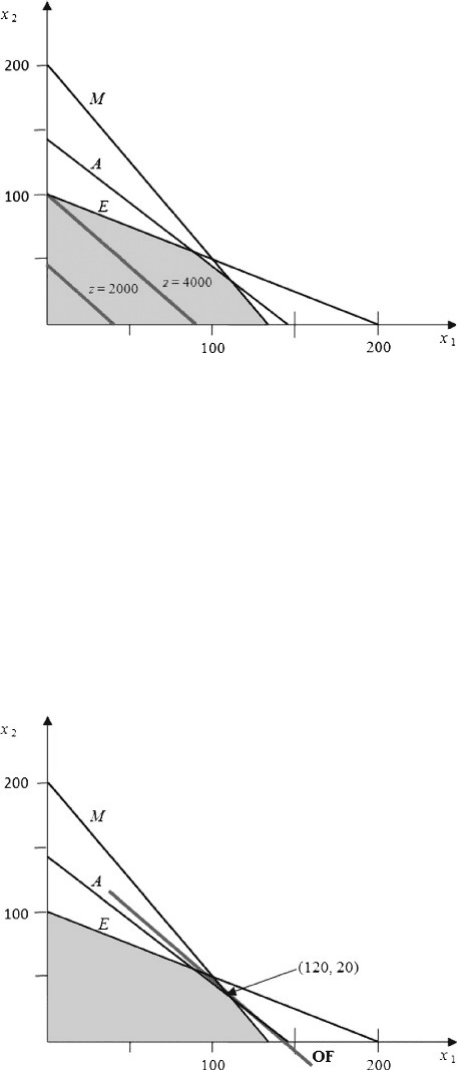
to a particular value of z. Relatively larger values of z correspond to lines in this family
that lie farther above and to the right. We wish to find the largest value of z attainable in
this family and within the feasible region. A look at the figure indicates that this value
occurs at the intersection of the assembly and mechanical constraints.
We can make this result more precise by solving for the point at which the
assembly and mechanical constraints intersect. This point is (120, 20), as shown in
Figure A2.5, corresponding to a product mix of 120 standard ovens and 20 deluxe
ovens. The corresponding profit total is $6800, corresponding to the objective function
line for z ¼ 6800, labeled OF in the figure. Using graphical methods, we have found
the best value of the objective function and the decisions that generate it.
Figure A2.4. Sketch of
objective function lines.
Figure A2.5. Sketch of
optimal point.
A2.1. An Example 381
A2.2. GENERALITIES
The oven-manufacturing problem was merely an example, but it does illustrate the
principles of graphical solution methods for optimization. In the example, all con-
straints are of the LT (less-than) variety. This means that points on the graph are feas-
ible if they lie on or below the corresponding constraint line. On the other hand, had we
encountered GT (greater-than) constraints, the feasible points would have been found
on or above the corresponding constraint line. The other possibil ity, EQ (equal-to)
constraints, would force us to consider only points lying directly on the constraint line.
In our example, the criterion was to maximize the objective function. By sketch-
ing the implications for two lines, each corresponding to a particular value of the
objective function (sometimes called an iso-value line), we can begin to see a
family of related objective function lines, leading to a maximum feasible value at
one corner of the feasible region. Our objective function contained all positive coeffi-
cients, so the process of maximization led us to lines ever higher and to the right on our
graph. Had we been interested in minimization (of a function with all positive coeffi-
cients), we would have been led to lines lower and to the left of a given starting point.
For other combinations involving negative coefficients, the idea is to plot the graph of
two or three iso-value lines, in order to see where on the graph the optimum will ulti-
mately be found.
An examination of iso-value lines could reveal that there is no limit, in some
direction, to the value of the objective function. This would be the case if we were ana-
lyzing an unbounded problem. In other circumstances, attempting to delineate the
feasible region itself will reveal an infeasible problem, in which the constraints are
mutually contradictory. These two exceptional cases can therefore be identified
while carrying out the graphical analysis.
The graphical method is valuable because it produces a picture of the optimization
process. That picture may make it easier to interpret what occurs during an optimiz-
ation procedure. However, the graphical method is more difficult when there are
three dimensions and impossible when there are more than three dimensions, so we
can use it only for relatively simple cases. Nevertheless, two-dimensional examples
illustrate most of the principles of linear programming.
As an example, suppose we consider well-posed linear programs in which the
feasible region exists and in which the objective function is not unbounded. The
theory tells us that an optimum can be found at one of the corners of the feasible
region. This property is very useful, because it means that we don’t have to search
for an optimal point in the interior of the region (an area that contains an infinite
number of points.) Instead, we can limit our search to the boundary, and just to the
corner points on that boundary, which are finite in number. This is what most linear
programming codes do: They search systematically among the corner points on the
boundary of the feasible region, stopping only when an optimum has been located.
A second theoretical result tells us that we can identify an optimal corner point by
showing that its objective function value is better than those of its neighboring corner
points. Each of the corner points in our graph has two neighbors, and either of these
can be reached by moving along one of the boundaries of the feasible region. When we
382
Appendix 2 Graphical Methods in Linear Programming
start our search at one of the corner points, only two things can happen. Either the
objective function is better than at both neighboring corners (in which case, we
have found the optimum), or one of the neighbors has a better value. In the latter
case, we move to that point and then evaluate the neighboring possibilities from the
new location. In linear programming problems, we are essentially guaranteed that
this search procedure ultimately leads to the optimum. Indeed, this approach lies at
the heart of the simplex algorithm, which is the most popular method in use today
for finding solutions to linear programming problems. (For an algebraic glimpse of
the simplex method, see Appendix 3.)
A2.2. Generalities 383

Appendix 3
The Simplex Method
The simplex method is the algorithm most frequently used in computer programs for
solving linear programming problems. The linear solver in Excel is an implementation
of the simplex method, and the simplex method constitutes part of virtually every
successful commercial software package for optimization. In this appendix, we use
an example to illustrate the simplex method, and we comment on how the algorithm
can be adapted to special situations that arise.
A3.1. AN EXAMPLE
We use a variation of Example 2.1 to illustrate how the simplex method works. For this
purpose, we drop the wo od constraint and address the following optimization problem.
Maximize z ¼ 16C þ20D þ14T
subject to
4C þ6D þ2T 2000
3C þ8D þ6T 2000
9C þ6D þ4T 1440
The simplex method works not with inequalities but rather with equalities, so our first
step is to recast the constraints of the model as equations. To do so, we introduce three
additional variables that account for unused amounts of the three resources. In other
words, these variables represent the difference between the right-hand side (RHS)
and left-hand side (LHS) of the constraints, as they are posed above. The constraints
may be written as follows.
Set 1 : 4C þ 6D þ 2T þu ¼ 2000 (A3:1)
3C þ 8D þ 6T þv ¼ 2000 (A3: 2)
9C þ 6D þ 4T þw ¼ 1440 (A3:3)
The variables u, v, and w are called slack variables: they measure the amount of slack,
or unused resource, in each constraint. These three variables, like the three original
Optimization Modeling with Spreadsheets, Second Edition. Kenneth R. Baker
# 2011 John Wiley & Sons, Inc. Published 2011 by John Wiley & Sons, Inc.
385