Enns R.H. Computer Algebra Recipes for Mathematical Physics
Подождите немного. Документ загружается.

248 CHAPTER 6. INTEGRAL TRANSFORMS
BI := −
∞
0
sin(a
√
r) e
(−rt)
rπ
dr +1
Applying the value command to BI yields the answer to the first part of the
question, the result being expressed in terms of the error (erf) function or,
on applying convert(BI,erfc), in terms of the complimentary error (erfc)
function.
>
BI:=value(BI); BI:=convert(BI,erfc);
BI := −erf(
a
2
√
t
)+1 BI := erfc(
a
2
√
t
)
So, L
−1
(e
−a
√
s
/s)=erfc(a/(2
√
t)).
As a check, I. M. will derive exactly the same result by directly applying
the inverse Laplace transform command. She mentally replaces a
√
s with
√
y
and t with t/a
2
in the Bromwich integral, so that the function to be inverse
transformed is F2 = e
−
√
y
/y. Loading the integral transform package,
>
F2:=exp(-sqrt(y))/y; with(inttrans):
F2 :=
e
(−
√
y)
y
she inverse transforms F2 and applies the radical simplification command.
>
check:=radsimp(invlaplace(F2,y,t/aˆ2));
check := erfc(
a
2
√
t
)
The result is exactly the same as in BI .
To answer the second part of the question, I. M. notes that e
−a
√
s
/
√
s =
−
d
da
(e
−a
√
s
/s)=−
dF (s)
da
. Thus, the second inverse Laplace transform, ILT2 ,
follows on differentiating BI with respect to a and multiplying by −1.
>
ILT2:=-diff(BI,a);
ILT2 :=
e
(−
a
2
4 t
)
√
π
√
t
Once again I. M. confirms her answer by making the same variable transforma-
tion as above, forming the new function F3 = e
−
√
y
/(a
√
y), and applying the
inverse Laplace transform to F3 and simplifying.
>
F3:=exp(-sqrt(y))/(a*sqrt(y));
F3 :=
e
(−
√
y)
a
√
y
>
check2:=radsimp(invlaplace(F3,y,t/aˆ2));
check2 :=
e
(−
a
2
4 t
)
√
πt
Theanswer,ofcourse,isthesameasinILT2 .
6.3. BROMWICH INTEGRAL AND CONTOUR INTEGRATION 249
6.3.3 Cooling That Weenie Rod
Write while the heat is in you. The writer who postpones the record-
ing of his thoughts uses an iron which has cooled to burn a hole with.
He cannot inflame the minds of his audience.
Henry David Thoreau, American author, philosopher, naturalist (1817–62)
Returning to our “tale” of the Northern weenie roast, having finished with
the long iron rods that they used for cooking their weenies, Russell places them
outdoors again to cool in the 0
◦
temperature. This recipe is an idealization of
that cooling process.
AverylongcircularrodofradiusR, initially having a constant temperature
T
0
throughout, has a constant temperature of 0
◦
applied to its surface for times
t ≥ 0. Determine the temperature at an arbitrary point inside the rod after the
cooling process has begun. Animate the temperature profile inside the rod.
If the rod were of finite length, one would use cylindrical coordinates (r, θ, z)
where r is the radial distance from the cylinder axis, θ the angle around the cir-
cumference of the cylinder, and z the distance along the cylinder axis. Treating
the rod as being infinitely long (which might have presented a “slight” problem
for the weenie roast!) removes the z-dependence from the problem. Since the
rod initially has a constant temperature throughout and the boundary condi-
tion at the surface has no angular dependence, the temperature T inside the
rod depends only on the radial distance r, i.e., T =T (r, t). T (r, t) then satisfies
the following heat diffusion equation (a
2
being the heat diffusion coefficient) for
0 <r<Rand t>0,
∂T
∂t
= a
2
∂
2
T
∂r
2
+
1
r
∂T
∂r
,T(R, t)=0,T(r, 0) = T
0
. (6.14)
The problem can be made dimensionless by setting u ≡ T/T
0
, x ≡ r/R,and
τ ≡ a
2
t/R
2
,sothat
∂u
∂τ
=
∂
2
u
∂x
2
+
1
x
∂u
∂x
,u(1,τ)=0,u(x, 0) = 1. (6.15)
After loading the plots and integral transform packages, the normalized heat
flow equation given in (6.15) is entered in pde .
>
restart: with(plots): with(inttrans):
>
pde:=diff(u(x,tau),tau)=diff(u(x,tau),x,x)+diff(u(x,tau),x)/x;
pde :=
∂
∂τ
u(x, τ )=(
∂
2
∂x
2
u(x, τ )) +
∂
∂x
u(x, τ )
x
For later notational convenience, the addtable command is used to replace the
Laplace transform of u(x, τ ), with respect to τ,withthesymbolF (x, s).
>
addtable(laplace,u(x,tau),F(x,s),tau,s):
250 CHAPTER 6. INTEGRAL TRANSFORMS
The initial condition u(x, 0) = 1 is entered, and pde Laplace transformed with
respect to τ in de. The initial condition is automatically substituted into de.
>
u(x,0):=1; de:=laplace(pde,tau,s);
u(x, 0) := 1
de := s F (x, s) − 1=(
∂
2
∂x
2
F (x, s)) +
∂
∂x
F (x, s)
x
The spatially dependent ODE de is analytically solved for F (x, s)insol,the
answer involving zeroth-order Bessel functions of the first and second kinds.
>
sol:=dsolve(de,F(x,s));
sol := F (x, s) = BesselJ(0,
√
−sx) F2 (s) + BesselY(0,
√
−sx) F1 (s)+
1
s
Since Y
0
(
√
−sx) diverges at x = 0 (the central axis of the rod), it is removed
from the right-hand side of sol, F (x, s) then taking the form shown in sol2 .
>
sol2:=remove(has,rhs(sol),BesselY);
sol2 := BesselJ(0,
√
−sx) F2 (s)+
1
s
From the boundary condition u(1,τ) = 0, one must have F (x =1,s)=0. This
transformed boundary condition (bc) is now applied to sol2 .
>
bc:=eval(sol2,x=1)=0;
bc := BesselJ(0,
√
−s) F2 (s)+
1
s
=0
The boundary condition bc is then solved for the arbitrary function
F2 (s)
which, because it is assigned, is automatically substituted into sol2 ,orF (x, s).
>
_F2(s):=solve(bc,_F2(s)); F(x,s):=sol2;
F2 (s):=−
1
BesselJ(0,
√
−s) s
F (x, s):=−
BesselJ(0,
√
−sx)
BesselJ(0,
√
−s) s
+
1
s
To determine u(x, τ ), we must calculate the inverse Laplace transform of F (x, s).
As you may verify, using the inverse Laplace transform command in the inte-
gral transform package will not work here because, in addition to the simple
pole at s=0, F (x, s) has an infinite number of simple poles associated with the
zeros of J
0
(
√
−s). This implies that u(x, τ ) will consist of an infinite series. To
determine the series form, the Bromwich integral must be evaluated.
Choosing the “basic” contour Γ on the left of Figure 6.8, all the poles lie
inside Γ in the limit that the radius R of the circular arc goes to infinity. Since
the circular arc contribution to the line integral vanishes in this limit, the inverse
Laplace transform will be the sum of the residues of the poles inside Γ. We will
now calculate the residues.
For the p ole at s =0, applying the residue command to e
sτ
F (x, s) yields 0.
6.3. BROMWICH INTEGRAL AND CONTOUR INTEGRATION 251
>
residue(exp(s*tau)*F(x,s),s=0);
0
Now the term J
0
(
√
−s) in the denominator of the first term of F (x, s)has
simple zeros at, say, λ
1
, λ
2
,....Thus the integrand corresponding to the first
term has simple poles at s=s
n
= −λ
2
n
, n=1, 2, ... Thefirst15valuesofs
n
are
calculated in S using the BesselJZeros command, and S is assigned.
>
S:=[seq(s[n]=-(BesselJZeros(0,n))ˆ2,n=1..15)]; assign(S):
S := [s
1
= −BesselJZeros(0, 1)
2
,s
2
= −BesselJZeros(0, 2)
2
, ···
Care must be taken in evaluating the residues at the zeros of J
0
(
√
−s). The
residue of the integrand at s=s
n
is given by
lim
s→s
n
(s − s
n
)
−
e
sτ
J
0
(
√
−sx)
sJ
0
(
√
−s)
= −
e
sτ
J
0
(
√
−sx)
s
d
ds
1
J
0
(
√
−s)
2
s=s
n
,
where use has been made of L’Hospital’s rule. A functional operator U is
created to implement this latter form for the residue of the integrand at an
arbitrary zero of J
0
.
>
U:=sn->simplify(-eval(exp(s*tau)*BesselJ(0,sqrt(-s)*x)
/(s*diff(BesselJ(0,sqrt(-s)),s)),s=sn));
U := sn → simplify
−
e
(sτ)
BesselJ(0,
√
−sx)
s (
d
ds
BesselJ(0,
√
−s))
s = sn
Making use of U, the formal series solution for u is given out to 15 terms.
>
u:=Sum(U(s[n]),n=1..15);
u :=
15
n=1
2 e
(s
n
τ)
BesselJ(0,
√
−s
n
x)
BesselJ(1,
√
−s
n
)
√
−s
n
The explicit series form of the normalized temperature distribution is now de-
termined in u2 , only the first few terms being displayed here in the text.
>
u2:=evalf(value(u));
u2 := 1.601974697 e
(−5.783185964 τ )
BesselJ(0., 2.404825558 x)
− 1.064799259 e
(−30.47126234 τ )
BesselJ(0., 5.520078110 x)
+0.8513991928 e
(−74.88700679 τ )
BesselJ(0., 8.653727913 x)
− 0.7296452400 e
(−139.0402844 τ )
BesselJ(0., 11.79153444 x)+···
For τ>0, the terms quickly drop off in magnitude, but for τ = 0 many terms
must be kept to reduce the “ringing” associated with the initial step-function
temperature profile.
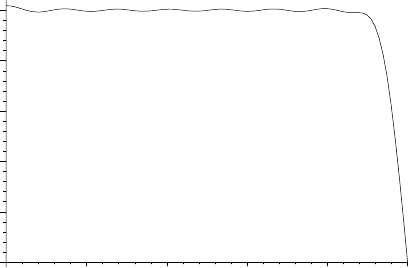
The series solution u2 is animated over the time interval τ =0.001 to 2. The
animation is started slightly past τ = 0 to eliminate the worst of the ringing.
The initial frame of the animation is shown in Figure 6.9.
252 CHAPTER 6. INTEGRAL TRANSFORMS
>
animate(u2,x=0..1,tau=0.001..2,numpoints=100,frames=50,
labels=["x=r/R","u=T/T0"]);
0
0.2
0.4
u=T/T0
0.8
1
0.2 0.4
x=r/R
0.8 1
Figure 6.9: Initial frame of animated temperature distribution inside the rod.
By the time the animation reaches τ = 2, the normalized temperature profile
inside the rod has effectively decayed to 0.
6.4 Other Transforms
While the Fourier and Laplace transforms are the most recognized and useful
of integral transforms, there exist other transforms which can be applied in
particular geometries. We will conclude this chapter with an example involving
the Hankel transform applied to a problem having cylindrical symmetry.
The Hankel transform (F
m
(k)) of order m>−1/2 of a function f(r), and
the inverse transform, are given by
F
m
(k)=
∞
0
f(r) J
m
(kr) rdr, f(r)=
∞
0
F
m
(k) J
m
(kr) kdk, (6.16)
where J
m
is the mth order Bessel function of the first kind. The reader is re-
ferred to standard mathematical physics texts for a discussion of the properties
of Hankel transforms. However, it should be mentioned that there is no simple
convolution theorem for the Hankel transform.
The Maple commands for performing the transform operations in equa-
tion (6.16) are hankel(f(r),r,k,m) and hankel(F
m
(k),k,r,m), respectively.
The integral transform package must be loaded to use these commands. In
some cases, as the following recipe illustrates, it may be easier to make use of
the basic defining relations (6.16) than Maple’s Hankel transform commands.
6.4. OTHER TRANSFORMS 253
6.4.1 Meet the Hankel Transform
Reason transformed into prejudice is the worst form of prejudice,
because reason is the only instrument for liberation from prejudice.
Allan Bloom, American educator, author, (1930–1992)
We wish to determine the subsequent transverse vibrations of a thin, infi-
nite, elastic membrane which is initially at rest and has an initial displacement
ψ(r, θ, t =0)=A/
1+r
2
/a
2
. The solution ψ(r, θ, t > 0) will then be animated
in three dimensions, taking A=1, a=10, and wave speed c =1.
The plots, integral transform, and VectorCalculus packages are loaded, being
required for the animate, hankel,andLaplacian commands, respectively.
>
restart: with(plots): with(inttrans): with(VectorCalculus):
It is assumed that c>0, t>0, A>0, a>0, and r>0. The initial condition
for the shape is also entered.
>
assume(c>0,t>0,A>0,a>0,r>0): ic:= A/sqrt(1+rˆ2/aˆ2);
ic :=
A
r
2
a
2
+1
Since the initial shape has no angular (θ) dependence, the subsequent membrane
displacement must also be independent of θ, i.e., ψ = ψ(r, t). This also suggests
that we set m = 0 when applying the Hankel transform and its inverse. The
relevant wave equation for ψ(r, t) is now entered in polar coordinates in pde .
>
pde:=expand(Laplacian(psi(r,t),’polar’[r,theta]))
-(1/cˆ2)*diff(psi(r,t),t,t)=0;
pde :=
∂
∂r
ψ(r, t)
r
+(
∂
2
∂r
2
ψ(r, t)) −
∂
2
∂t
2
ψ(r, t)
c
2
=0
Then pde is Hankel transformed with respect to the radial coordinate r,with
m= 0, and multiplied by −c
2
. A time-dependent ODE results in eq .
>
eq:=-cˆ2*hankel(pde,r,k,0);
eq := (
∂
2
∂t
2
hankel(ψ(r, t),r,k,0)) + k
2
hankel(ψ(r, t),r,k,0) c
2
=0
To simplify the notation, the Hankel transform of ψ(r, t) with respect to r with
m= 0 is replaced with F (t)ineq .
>
eq2:=subs(hankel(psi(r,t),r,k,0)=F(t),eq);
eq2 := (
d
2
dt
2
F (t)) + k
2
F (t) c
2
=0
Since ∂ψ(r, t)/∂t =0 at t =0, eq2 is analytically solved using dsolve for F (t),
subject to the initial condition dF (t)/dt =0 at t =0.
>
sol:=dsolve({eq2,D(F)(0)=0},F(t));
sol := F(t)=
C2 cos(ckt)
254 CHAPTER 6. INTEGRAL TRANSFORMS
At t = 0, one has from eq2 ,
C2=F (0). So we need to calculate the Hankel
transform (with m=0) of the initial membrane shape. If the hankel command
was used,
C2 would be expressed as a combination of generalized hypergeomet-
ric functions, which are difficult to reduce to a simpler form. This then would
lead to further difficulty in performing the inverse Hankel transform. Instead,
let’s determine
C2 by using the basic defining relation (6.16) and calculating
∞
0
ic r J
0
(kr) dr. The result is then simplified.
>
_C2:=simplify(int(ic*r*BesselJ(0,k*r),r=0..infinity));
C2 :=
Ae
(−ak)
a
k
With the form of
C2 automatically substituted, F(t)isgivenbytherhsofsol.
>
F(t):=rhs(sol);
F (t):=
Ae
(−ak)
a cos(ckt)
k
Applying the inverse Hankel transform command to F (t) would again generate
an answer in terms of generalized hypergeometric functions which is difficult to
simplify and express in real form. So, the basic defining relations will be used.
First, however, it’s necessary to convert F (t) to an exponential form.
>
F2:=simplify(convert(F(t),exp));
F2 :=
1
2
Aa(e
(k (−a+ctI))
+ e
(−k (a+ctI))
)
k
Then ψ is obtained by calculating the integral
∞
0
F2 k J
0
(kr) dk.
>
psi:=int(F2*k*BesselJ(0,k*r),k=0..infinity);
ψ :=
Aa
2 r
1+
(a − ctI)
2
r
2
+
Aa
2 r
1+
(a + ctI)
2
r
2
The displacement ψ is expressed in terms of I ≡
√
−1. As the initial profile was
real, ψ should be real, however, not complex. That it is real may be confirmed
by applying the complex evaluation command to ψ and simplifying.
>
psi2:=simplify(evalc(psi));
ψ2:= Aa
√
2
√
r
4
+2r
2
a
2
−2 r
2
c
2
t
2
+a
4
+2a
2
c
2
t
2
+c
4
t
4
+r
2
+a
2
−c
2
t
2
(2
√
r
4
+2r
2
a
2
−2 r
2
c
2
t
2
+a
4
+2a
2
c
2
t
2
+c
4
t
4
)
To animate the vibrations, the given parameter values are substituted into ψ2,
which is also converted to Cartesian coordinates by setting r=
x
2
+ y
2
.
>
psi3:=subs({A=1,a=10,c=1,r=sqrt(xˆ2+yˆ2)},psi2);
Finally, ψ3isanimatedwiththeanimate command. A triangular grid style is
used to smooth out the wave form.
>
animate(plot3d,[psi3,x=-100..100,y=-100..100],t=0..90,
frames=100,axes=boxed,gridstyle=triangular,orientation
=[25,65],tickmarks=[3,3,2],labels=["x","y","psi"]);
Execute the recipe to see what happens.

6.5 SUPPLEMENTARY RECIPES 255
6.5 Supplementary Recipes
06-S01: Verifying the Convolution Theorem
Using the symmetric factor convention, verify that the convolution theorem is
satisfied for the functions f1 = Ae
−a
2
x
2
and f2 = Ae
−a |x|
with a>0, A>0.
06-S02: Bandwidth Theorem
An approximately monochromatic plane wave packet in one dimension has the
instantaneous form u(x, 0) = f(x) e
ik
0
x
, with f(x) the envelope function and
k
0
the central wave number. Consider:
(a) f
1
=Ae
−a
2
x
2
; (b) f
2
=Ae
−a|x|
; (c) f3 =A for |x| <a, 0for|x| >a.
Foreachofthef(x), explicitly evaluate the root mean square deviations from
the means, i.e., ∆x =
√
<x
2
> − <x>
2
and ∆k =
√
<k
2
> − <k>
2
.The
means <>are defined in terms of the respective intensities |u(x, 0)|
2
= |f(x)|
2
and |F (k)|
2
, respectively, where F (k) is the Fourier transform of f(x). Show
that in each case the bandwidth theorem (the optical analogue of the uncertainty
principle)∆x ∆k ≥ 1/2 is satisfied.
06-S03: Solving an Integral Equation
Solve the following integral equation for f(x), and plot the solution:
∞
0
f(x) cos(αx) dx = {1 − α for 0 ≤ α ≤ 1, 0forα>1}.
06-S04: Verifying Parseval’s Theorem
For f (x)=x
6
sin(x) e
−2x
2
, calculate the Fourier transform F (k)=F(f(x)) using
the symmetric convention. Plot the intensities |f(x)|
2
and |F (k)|
2
.Verifythat
Parseval’s theorem is satisfied.
06-S05: Heat Diffusion in a Copper Rod
Suppose that the initial temperature distribution inside an infinitely long, thin,
insulated, copper rod is T = T 0for−x0 ≤ x ≤ x0 and zero otherwise. By
Fourier transforming the heat diffusion equation with respect to x, solving the
resulting time-dependent ODE with the initial condition, and performing the
inverse transform, determine the temperature distribution inside the rod for
arbitrary time t>0. For copper, the thermal conductivity K = 386 W/m·K
◦
,
the density ρ = 8900 kg/m
3
, and the specific heat capacity C = 390 J/kg· K
◦
.
If x0 = 1 m and T 0 = 100
◦
, animate the temperature profile over the time
interval t = 0 to the time it takes for the temperature at the origin to drop to
50
◦
. Determine the temperature at x =2 m at the time the temperature at the
origin has dropped to 50
◦
.
06-S06: Solving Another Integral Equation
Using the convolution theorem, solve the following integral equation for y(x):
∞
−∞
(y(u)/((x − u)
2
+ a
2
)) du =1/(x
2
+ b
2
)
4
, 0 <a<b.
Verify the solution by direct substitution of y(u) back into the integral equation.
Taking a= 1 and b=2, plot y(x) over the range x=−5to+5.

256 CHAPTER 6. INTEGRAL TRANSFORMS
06-S07: Free Vibrations of an Infinite Beam
Consider a horizontal beam which is initially at rest (∂ψ(x,0)/∂t =0) with the
shape ψ(x,0) = Ae
−b
2
x
2
, A and b being positive constants. When released, the
transverse vibrations of the beam are governed by ψ
xx
+(1/a
2
) ψ
tt
=0, with
a positive and the subscripts denoting partial derivatives. By Fourier trans-
forming the beam PDE with respect to x, solving the resulting time-dependent
ODE with the initial conditions, and performing the inverse transform, deter-
mine ψ(x, t)fort>0. Taking A= b= a=1, animate the motion of the beam.
06-S08: A Potential Problem
The potential V (x, y) (in volts) in the region x>0, y>0 has the boundary
conditions V (0,y)=0 and V (x, 0) = 1. Using an appropriate Fourier transform
approach, determine V (x, y). Plot the equipotentials in 0.1 volt increments.
06-S09: Solving an ODE
Use the Laplace transform method to solve the ODE
y
(t)+8y(t)=32t
3
− 16 t, y(0) = y
(0) = y
(0) = 0.
Verify the solution by directly solving the ODE using the dsolve command
with the Laplace transform option. Plot y(t) over the range t = 0 to 1.6, and
determine qualitatively and quantitatively the time at which the first minimum
in the solution curve occurs.
06-S10: Impulsive Force
A unit mass attached to a spring and lying on a flat rough table experiences
an impulsive force F (t)=5t
3
sin(t)fort ≤ π and = 0 for t ≥ π, the ODE being
y
(t)+2y
(t)+y(t)=F (t),y(0) = 0,y
=1.
Use the Laplace transform method to determine the displacement y(t)ofthe
mass. Confirm your result with the dsolve command, using the Laplace trans-
form option. Plot the solution over the range t=0 to 10. Determine the maxi-
mum displacement and the time at which it occurs.
06-S11: Bromwich Integral
Consider F (s)=1/(s
6
− 6s
5
+9s
4
+8s
3
− 24s
2
+ 16). Identify the singular
points of F (s). Calculate L
−1
(F (s)) by replacing the Bromwich integral with an
appropriate closed contour integral and using Cauchy’s residue theorem. Verify
the inverse Laplace transform by directly using the invlaplace command.
06-S12: Branch Point
Consider F (s)=
√
s/(s − 1). Identify the singular points. Plot a modified
Bromwich contour which can be used to evaluate L
−1
(F (s)). Use this contour
to explicitly carry out the evaluation. Verify your answer by directly using the
invlaplace command.
Chapter 7
Calculus of Variations
Although one could solve variational calculus problems with computer algebra
by completely mimicking a hand calculation, in all the recipes of this chapter
we will use the VariationalCalculus package to ease the work.
7.1 Euler–Lagrange Equation
Among all functions y(x) with fixed points y(x
0
)=y
0
and y(x
1
)=y
1
at two
distinct points A and B respectively, find the y(x) which gives an extremum
(minimum or maximum) or stationary value to the integral
I[y]=
x
1
x
0
F (x, y, y
) dx. (7.1)
The value of the integral I depends on what functional form is chosen for y(x).
In a given problem, F is a known function of x, y,andy
≡
dy
dx
.They which
gives an extremum value to I is found by solving the Euler–Lagrange equation,
∂F
∂y
−
d
dx
∂F
∂y
=0. (7.2)
In physical problems, it is usually evident whether y minimizes or maximizes I.
If F does not explicitly depend on x, Equation (7.2) may be written as
d
dx
F −y
∂F
∂y
=0, (7.3)
so that a first integral of Equation (7.2) is F − y
(∂F/∂y
) = constant.
7.1.1 Betsy’s In A Hurry
Work expands so as to fill the time available for its completion.
C. Northcote Parkinson, English writer, Parkinson’s Law (1958)
One of the oldest variational examples is the brachistochrone
1
problem pro-
posed by John Bernoulli in 1696 and independently solved by him and his
brother James, Gottfried Leibniz, and Isaac Newton.
1
brachistos ≡shortest, chronos ≡time