Francoise J.-P., Naber G.L., Tsun T.S. (editors) Encyclopedia of Mathematical Physics
Подождите немного. Документ загружается.


two-dimensional Hilbert space, for instance, we can
consider the initial pure state hij =: [ cos , sin ] and
the time-continuous measurement of the diagonal
observable [59] on it. The solution of eqn [58] is
given by eqn [60]:
^
A ¼
10
0 1
½59
E½
^
t
¼
cos
2
e
t=4g
2
cos sin
e
t=4g
2
cos sin sin
2
"#
½60
The off-diagonal elements of this density matrix
go to zero, that is, the coherent superposition
represented by the initial pure state becomes an
incoherent mixture represented by the diagonal
density matrix
^
1
.
Apart from the phenomenon of decoherence, the
stochastic equations show remarkable similarity
with the classical equations of time-continuous
measurement. The heuristic form of eqn [56] is
eqn [61] of invariable interpretation with respect
to the classical equation [19]:
a
t
¼h
^
Ai
^
t
þ g
t
½61
Equation [57] describes what is called the time-
continuous collapse of the quantum state under
time-continuous quantum measurement of
^
A. For
concreteness, we assume discrete spectrum for
^
A and
consider the spectral expansion
^
A ¼
X
a
^
P
½62
The real values a
are nondegenerate eigenvalues.
The Hermitian projectors
^
P
form a complete
orthogonal set:
X
^
P
^
I ½63
^
P
^
P
¼
^
P
½64
In a single ideal measurement of
^
A, the outcome a is
one of the a
’s singled out at random. The
probability distribution of the measurement out-
come and the corresponding collapse of the state are
given by
p
¼h
^
P
i
^
0
½65
^
0
!
1
p
^
P
^
0
^
P
¼:
^
½66
respectively. Equations [56] and [57] of continuous
measurements are an obvious time-continuous
resolution of the ‘‘sudden’’ ideal quantum measure-
ment (eqns [65] and [66]) in a sense that they
reproduce it in the limit t !1. The states
ˆ
are
stationary states of eqn [57]. It can be shown that
they are indeed approached with probability p
for
t !1 (Gisin 1984).
Related Contexts
In addition to the two particular examples as
in postselection and in time-continuous measure-
ment, respectively, presented above, the weak
measurement limit itself has further variants.
A most natural example is the usual thermodynamic
limit in standard statistical physics. Then weak
measurements concern a certain additive micro-
scopic observable (e.g., the spin) of each constituent
and the weak value represents the corresponding
additive macroscopic parameter (e.g., the magneti-
zation) in the infinite volume limit. This example
indicates that weak values have natural interpreta-
tion despite the apparent artificial conditions of
their definition. It is important that the weak value,
with or without postselection, plays the physical role
similar to that of the common mean h
^
Ai
ˆ
. If,
between their pre- and postselection, the states
ˆ
become weakly coupled with the state of another
quantum system via the observable
^
A, their average
influence will be as if
^
A took the weak value
ˆ
h
^
Ai
ˆ
.
Weak measurements also open a specific loophole to
circumvent quantum limitations related to the
irreversible disturbances that quantum measure-
ments cause to the measured state. Noncommuting
observables become simultaneously measurable in
the weak limit: simultaneous weak values of non-
commuting observables will exist.
Literally, weak measurement had been coined
in 1988 for quantum measurements with (pre- and)
postselection, and became the tool of a certain time-
symmetric statistical interpretation of quantum states.
Foundational applications target the paradoxical
problem of pre- and retrodiction in quantum theory.
In a broad sense, however, the very principle of weak
measurement encapsulates the trade between asymp-
totically weak precision and asymptotically large
statistics. Its relevance in different fields has not yet
been fully explored and a growing number of founda-
tional, theoretical, and experimental applications are
being considered in the literature – predominantly in
the context of quantum physics. Since specialized
monographs or textbooks on quantum weak measure-
ment are not yet available, the reader is mostly referred
to research articles, like the recent one by Aharonov
and Botero (2005),coveringmanytopicsofpostse-
lected quantum weak values.
282 Quantum Mechanics: Weak Measurements
Nomenclature
a measurement outcome
a arithmetic mean of measurement
outcomes
^
A Hermitian operator, quantum observable
A(X) real phase-space function
E[ ...] stochastic expectation value
hf j
^
Ajii matrix element
hf jii inner product
H Hilbert space
L
2
space of Lebesgue square-integrable
complex functions
p probability distribution
tr trace
^
U unitary operator
W
t
Wiener process
t
white noise process
h...i
postselected mean value
ˆ
density operator
(X) phase-space distribution
direct product
y operator adjoint
j...i state vector
h...j adjoint state vector
h...i
mean value
Further Reading
Aharonov Y, Albert DZ, and Vaidman L (1988) How the result of
measurement of a component of the spin of a spin-1/2 particle
can turn out to be 100. Physical Review Letters 60: 1351–1354.
Aharonov Y and Botero A (2005) Quantum averages of weak
values. Physical Review A (in print).
Aharonov Y, Popescu S, Rohrlich D, and Vaidman L (1993)
Measurements, errors, and negative kinetic energy. Physical
Review A 48: 4084–4090.
Aharonov Y and Vaidman L (1990) Properties of a quantum
system during the time interval between two measurements.
Physical Review A 41: 11–20.
Belavkin VP (1989) A new equation for a continuous
nondemolition measurement. Physics Letters A 140:
355–358.
Dio´si L (1988) Continuous quantum measurement and Itoˆ-
formalism. Physics Letters A 129: 419–432.
Gisin N (1984) Quantum measurements and stochastic processes.
Physical Review Letters 52: 1657–1660.
Giulini D, Joos E, Kiefer C, Kupsch J, Stamatescu IO et al. (1996)
Decoherence and the Appearance of a Classical World in
Quantum Theory. Berlin: Springer.
Gough J and Sobolev A (2004) Stochastic Schro¨dinger equations
as limit of discrete filtering. Open Systems and Information
Dynamics 11: 1–21.
Kraus K (1983) States, Effects, and Operations: Fundamental
Notions of Quantum Theory. Berlin: Springer.
von Neumann J (1955) Mathematical Foundations of Quantum
Mechanics. Princeton: Princeton University Press.
Nielsen MA and Chuang IL (2000) Quantum Computation and
Quantum Information. Cambridge: Cambridge University
Press.
Stratonovich R (1968) Conditional Markov Processes and Their
Application to the Theory of Optimal Control. New York:
Elsevier.
Wiseman HM (2002) Weak values, quantum trajectories, and the
cavity-QED experiment on wave-particle correlation. Physical
Review A 65: 32111–32116.
Quantum n-Body Problem
R G Littlejohn, University of California at Berkeley,
Berkeley, CA, USA
ª 2006 Elsevier Ltd. All rights reserved.
Introduction
This article concerns the nonrelativistic quantum
mechanics of isolated systems of n particles inter-
acting by means of a scalar potential, what we shall
call the ‘‘quantum n-body problem.’’ Such systems
are described by the kinetic-plus-potential
Hamiltonian,
H ¼ T þ V ¼
X
n
¼1
jP
j
2
2m
þ VðR
1
; ...; R
n
Þ½1
where R
, P
, = 1, ..., n are the positions and
momenta of the n particles in three-dimensional
space, m
are the masses, and V is the potential
energy. This Hamiltonian also occurs in the
‘‘classical n-body problem,’’ in which V is usually
assumed to consist of the sum of the pairwise
gravitational interactions of the particles. In this
article, we shall only assume that V (hence H)is
invariant under translations, proper rotations, par-
ity, and permutations of identical particles. The
Hamiltonian H is also invariant under time reversal.
This Hamiltonian describes the dynamics of isolated
atoms, molecules, and nuclei, with varying degrees
of approximation, including the case of molecules in
the Born–Oppenheimer approximation, in which V
is the Born–Oppenheimer potential. We shall ignore
the spin of the particles, and treat the wave function
as a scalar. We assume that is an eigenfunction
of H, H=E. In practice, the value of n typically
ranges from 2 to several hundred. Often the cases
n = 3andn = 4 are of special interest. In this article,
we shall assume that n 3, since n = 2 is the trivial
case of central-force motion. The quantum n-body
problem is not to be confused with the ‘‘quantum
Quantum n-Body Problem 283
many-body problem,’’ which usually refers to the
quantum mechanics of large numbers of identical
particles, such as the electrons in a solid.
Of particular interest is the ‘‘reduction’’ of the
Hamiltonian [1], that is, the elimination of those
degrees of freedom that can be eliminated due to the
continuous symmetries of translations and rotations.
A basic problem is to write down the reduced
Hamiltonian and to make its analytical and geome-
trical properties clear. In the following we shall
present this reduction in two stages, dealing first with
the translations and second with the proper rotations.
In each stage, we shall describe the reduction first in
coordinate language and then in geometrical lan-
guage. The discrete symmetries of parity, time
reversal, and permutation of identical particles are
handled by standard methods of group representation
theory, and will not be discussed here.
There has been considerable interest in mathema-
tical circles in recent years in the reduction of
dynamical systems with symmetry, and the quantum
n-body problem is one of the most important such
systems from a physical standpoint. As such, the
basic theory of the quantum n-body problem has
received considerable attention in the physical
literature going back to the birth of quantum
mechanics, and continues to be of great practical
importance. This article and the bibliography
attempt to bridge these two centers of interest.
Reduction by Translations: Coordinate
Description
We begin with a coordinate description of the
reduction of the system [1] by translations. The
coordinates (R
1
, ..., R
n
) are coordinates on the con-
figuration space of the system, called the ‘‘original
configuration space’’ or OCS. The OCS is R
3n
.The
original system has 3n degrees of freedom. The
translation group acts on configuration space by
R
7!R
þ ,for = 1, ..., n, where is a displace-
ment vector. It acts on wave functions by
(R
1
, ..., R
n
) 7!(R
1
, ..., R
n
).
To reduce the system by translations, we perform
a linear coordinate transformation on the OCS,
taking us from the original vectors (R
1
, ..., R
n
)toa
new set of n vectors (r
1
, ..., r
n1
, R
CM
), where R
CM
is the center-of-mass position,
R
CM
¼
1
M
X
n
¼1
m
R
½2
where M =
P
m
is the total mass of the system, and
the other n 1 vectors of the new coordinate system,
(r
1
, ..., r
n1
), are required to be translationally
invariant, that is, independent linear functions of the
relative particle positions R
R
.Wedenotethe
momenta conjugate to (r
1
, ..., r
n1
, R
CM
)by
(p
1
, ..., p
n1
, P
CM
), of which P
CM
turns out to be the
total momentum of the system,
P
CM
¼
X
n
¼1
P
½3
Under such a coordinate transformation, the poten-
tial energy becomes simply a function of the n 1
relative vectors, V(r
1
, ..., r
n1
), whereas the kinetic
energy becomes
T ¼
jP
CM
j
2
2M
þ
1
2
X
n1
;¼1
K
p
p
½4
where K
is a symmetric tensor (the ‘‘inverse mass
tensor’’).
The vectors (r
1
, ..., r
n1
) specify the positions of n
particles relative to their center of mass. As described
so far, these vectors need only be independent,
translationally invariant linear combinations of the
particle postitions. However, it is convenient to
choose them so that the inverse mass tensor becomes
proportional to the identity, K
= (1=M)
.An
elegant way of doing this is the method of Jacobi
vectors, which involves splitting the original set of
particles into two nonempty subsets, which are then
split into smaller subsets, etc., until only subsets of a
single particle remain. The process can be represented
by a tree growing downward, with the original n
particles as the root, and the ends of the branches at
the bottom each containing one particle. Then the
vectors (r
1
, ..., r
n1
) (the Jacobi vectors) are chosen
to be proportional to the differences between the
centers of mass of the two subsets at each splitting.
With the right constants of proportionality, the
kinetic energy becomes
T ¼
1
2M
jP
CM
j
2
þ
1
2M
X
n1
¼0
jp
j
2
½5
Henceforth, we shall assume that the vectors
(r
1
, ..., r
n1
) are Jacobi vectors with conjugate
momenta (p
1
, ..., p
n1
).
The choice of Jacobi vectors is not unique. In the
first place, there is a discrete set of possible ways of
splitting the original set of n particles into subsets
(of forming trees), each of which leads to the same
form [5] of the kinetic energy. More generally, the
kinetic energy [5] is invariant under transformations
r
0
¼
X
n1
¼1
Q
r
½6
284 Quantum n-Body Problem

where Q
is an orthogonal matrix, Q 2 O(n 1).
Such transformations are called ‘‘kinematic rota-
tions.’’ The discrete choices of trees in forming the
Jacobi vectors are equivalent to a discrete set of
kinematic rotations Q
that map one standard
choice of Jacobi vectors into the others.
Since the momentum P
CM
of the center of mass
commutes with H, the eigenfunctions of H can be
chosen to have the form
ðR
1
; ...; R
n
Þ
¼ expðiR
CM
P
CM
=hÞ ðr
1
; ...; r
n1
Þ½7
This causes to be an eigenfunction of the
‘‘translation-reduced Hamiltonian,’’ H
tr
= E
tr
,
where
H
tr
¼
1
2M
X
n1
¼0
jp
j
2
þ Vðr
1
; ...; r
n1
Þ½8
The kinetic energy of the center of mass,
jP
CM
j
2
=2M, has been discarded from both H
tr
and
E
tr
, which represent physically the energy of the
system about its center of mass.
Reduction by Translations: Geometrical
Description
The kinetic energy T in eqn [1] specifies a metric
ds
2
=
P
m
jdR
j
2
on the OCS (=R
3n
). The transla-
tion group (=R
3
) acts freely on the OCS, with an
action that is generated by P
CM
. This action defines
an orthogonal decomposition of the OCS,
R
3n
= R
3
R
3n3
, where R
3
is the orbit of the origin
(the other orbits of the translation group action are
parallel spaces), and R
3n3
is the orthogonal subspace
(henceforth the ‘‘translation-reduced configuration
space’’ or TRCS for short). The TRCS is physically
the space of configurations relative to the center of
mass. The vectors (r
1
, ..., r
n1
) are coordinates on
the TRCS. The TRCS possesses a metric which is the
projection of the metric on the OCS onto the TRCS
by means of the translation group action. The metric
can be projected because translations preserve the
original metric (they are isometries). Jacobi vectors
are Euclidean coordinates on the TRCS with respect
to this metric.
The tree method of constructing Jacobi vectors
can be understood in terms of certain group actions
which take place as each subset of particles is split
into two further subsets. The group action in
question leaves the center of mass of the original
subset invariant, while moving the two new subsets
apart along a line. This motion in the configuration
space is orthogonal to all the other group actions
that are created in the process of splitt ing subsets of
particles, including the original action of the
translation group. Thus, each splitting of a subset
of particles generates a three-dimensional subspace
of the OCS, on which one of the r
are coordinates.
The conjugate momentum p
is the generator of the
group action moving the two new subsets apart. The
final result is that the OCS is decomposed into n
orthogonal, three-dimens ional subspaces, one of
which contains the action of the original translation
group, and the others of which represent the
decomposition of the TRCS into n 1, three-
dimensional orthogonal subspaces.
The TRCS can also be seen as a global section of a
flat, trivial, principal fiber bundle created by the
action of the translation group on the OCS.
Alternatively, the TRC S can be seen as the quotient
space, R
3n
=R
3
. The construction is fairly simple
because the translation group is Abelian.
The wave function can be seen as a member of
the Hilbert space of wave functions on the TRCS,
upon which the reduced Hamiltonian H
tr
of eqn [8]
acts. Alternatively, it can be seen as the function
obtained by restricting on the OCS to the TRCS,
where has a dependence along the orbits of the
translation group given by exp (iR
CM
P
CM
=h), that
is, by an irredu cible representation (irrep) of the
translation group.
Reduction by Rotations: Coordinate
Description
The Hamiltonian H
tr
acts on wave functions
defined on the TRCS and has 3n 3 degree s of
freedom. Consider a coordinate transformation to
eliminate further degree s of freedom due to the
rotational invariance. This coordinate transforma-
tion takes us from the Jacobi vectors {r
, = 1, ...,
n 1} to orientational and shape coordinates. Shape
coordinates are a set of 3n 6 coordinates
{q
, = 1, ...,3n 6} that specify the shape of the
n-particle system, that is, they are 3n 6 independent
functions of the interparticle distances (hence rota-
tionally invariant). We will call the space upon which
the q
are coordinates ‘‘shape space.’’ For example, in
the case of the three-body problem, shape space is the
space of all triangles.
As for orientational coordinates, to define them it
is necessary first to define a ‘‘body frame.’’ We
assume we are already given one frame, the ‘‘space
frame,’’ a fixed inertial frame. The body frame is a
3-frame attached in a conventional way to each shape
of the system of particles, which rotates with the
particles. The orientational coordinates, to be
Quantum n-Body Problem 285

denoted by {
i
, i = 1, 2, 3}, are three coordinates (e.g.,
Euler angles) specifying the SO(3) rotation that maps
the space frame into the body frame. We shall write
the new coordinates collectively as {
i
, q
}.
There is a great deal of arbitrariness in the choice
of a body frame, since for a given shape a body frame
can be attached in many ways, the different choices
being related by proper rotations. The only require-
ment is that the body frame should change smoothly
as the shape changes. Popular choices for the body
frame are the principal axis and Eckart frames.
When the potential energy is transformed to the new
coordinates, it becomes a function only of the {q
},
that is, of the shape. The potential can be written as
V = V(q). V is a scalar field on shape space.
The transformation of the kinetic energy is more
complicated. When the (Euclidean) metric tensor on
the TRCS is transformed to orientational and shape
coordinates there results a (3n 3) (3n 3) com-
ponent matrix which may be partitioned into blocks
according to the coordinates {
i
, q
}, that is, accord-
ing to 3n 3 = 3 þ (3n 6). This matrix cannot be
made diagonal or even block diagonal by any choice
of orientational or shape coordinates, or by any
choice of body frame.
The components of the metric tensor in the new
coordinates are conveniently expressed in terms of
three fields on shape space. The first is the moment-of-
inertia tensor E, which describes the 3 3 upper block
of the metric tensor. Its components are given by
E
ij
¼ M
X
n1
¼1
jr
j
2
ij
r
i
r
j
½9
The vectors and tensor s in this equation can be
referred either to the space frame or the body fram e,
but the body frame is more convenient because then
the components of the vectors r
are functions only
of the shape coordinates q
. Thus, the body frame
components E
ij
of the moment-of-inertia tensor
define a field on shape space.
The second field is the ‘‘gauge potential’’ A
,an
object with 3(3n 6) components A
i
, i = 1, 2, 3,
= 1, ...,3n 6, which describes the off-diagonal
blocks of the metric tensor. It is defined by
A
¼ E
1
M
X
n1
¼1
r
@r
@q
!
½10
in which all vectors are understood to be referred to
the body frame (so the partial derivatives make
sense). The gauge potential A
is responsible for the
‘‘falling cat’’ phenomenon, in which a flexible body
of zero angular momentum nevertheless manages to
rotate.
The third field is the (3n 6) (3n 6) lower
block of the metric tensor on the TRCS, an object
with two shape indices. It is given by
g
¼ M
X
n1
¼1
@r
@q
@r
@q
A
E A
½11
where again the vectors are referred to the body
frame. The notation suggests (correctly) that g
is
the metric tensor on shape space.
On transforming the wave function from the
Jacobi vectors to coordinates (
i
, q
), it is convenient
to introduce a Jacobian factor, (r
1
, ..., r
n1
) =
D
1=4
(
i
, q
), where D = (det E)(det g
). This
causes the new wave function to have the
normalization
Z
dR
Y
3n6
¼1
dq
!
jj
2
½12
where dR is the Haar measure on the group SO(3).
The factor D depends only on the q
, not the
i
.
Then the Schro¨ dinger equation can be written as
H
tr
= E
tr
, where H
tr
is a differential operator
involving @=@
i
and @=@q
.
The orientational derivatives @=@
i
in H
tr
are
conveniently expressed in terms of the angular
momentum operator L. When acting on the original
wave function on the OCS, the angular momen-
tum is
L ¼
X
n
¼1
R
P
½13
When this is transformed to the coordinates
(r
1
, ..., r
n1
, R
CM
), it becomes L = L
CM
þ L
tr
,
where L
CM
= R
CM
P
CM
, and
L
tr
¼
X
n1
¼1
r
p
½14
Physically, L
tr
is the angular momentum of the
system about the center of mass.
We shall henceforth drop the ‘‘tr’’ on H
tr
, E
tr
, and
L
tr
, thereby restricting attention to the energy and
angular momentum about the center of mass.
The angular momentum L, when acting on wave
functions (r
1
, ..., r
n1
) on the TRCS, is a vector of
differential operators involving @=@r
. When these
are transformed to orientational and shape coordi-
nates, the components of L become differential
operators involving only orientational derivatives,
@=@
i
. There are no shape derivatives, @=@q
, since
L generates rotations, that is, changes in orientation,
not shape. Thus, one can solve for the operators
@=@
i
in terms of the components of L. This is true
286 Quantum n-Body Problem

both for the space and the body components of L,
although the differential operators are not the same
in the two cases. The space components of L satisfy
the usual angular momentum commutat ion rela-
tions, [L
i
, L
j
] = ih
ijk
L
k
, while the body compone nts
of satisfy [L
i
, L
j
] = ih
ijk
L
k
(with a minus sign
relative to the space commutation relations).
Thus, the Hamiltonian can be expressed in
terms of L and the shape momentum operators,
p
= ih@=@q
. The result is
H ¼
1
2
L E
1
L þ
1
2
ðp
L A
Þg
ðp
L A
Þ
þ V
2
ðqÞþVðqÞ½15
where all vectors are referred to the body frame,
where g
is the contravariant metric tensor on
shape space, and where V
2
is given by
V
2
¼
h
2
2
D
1=4
@
@q
g
@D
1=4
@q
½16
V
2
looks like a potential (it is a function of only q),
hence the notation, but physically it belongs to the
kinetic energy. It is sometimes called an ‘‘extrapoten-
tial.’’ It arises from nonclassical commutators in the
transformation of the kinetic energy (hence the h
2
dependence). The first term of eqn [15] is the kinetic
energy of rotation, also called the ‘‘vertical’’ kinetic
energy, the next two terms are the remainder of the
kinetic energy, somewhat imprecisely thought of as
the kinetic energy of vibrations or changes in shape,
also called the ‘‘horizontal kinetic energy,’’ and the
final term is the (true) potential, discussed above.
Since the Hamiltonian commutes with the angular
momentum, [H, L] = 0, can be chosen to be
simultaneous eigenfunctions of L
2
and L
z
(the lat ter
being the space component), as well as of energy.
Let
lm
be these eigenfunctions, where l and m are
the quantum numbers of L
2
and L
z
, respectively.
Then by the transformation properties of under
rotations, we can write
lm
ð
i
; q
Þ¼
X
þl
k¼l
lk
ðq
ÞD
l
km
ð
i
Þ½17
where D is a standard rotation matrix and
lk
are
functions only of q
. In these equations we use the
phase and other standard conventions of the theory of
rotations. The wave function is a function only of q
and can loosely be thought of as the wave function on
shape space. It is not a scalar like , ,or, but rather
has 2l þ 1 components indexed by k.
The Schro¨ dinger equation for can be written
as H = E, where H has the same form as in
eqn [15], except that now the components of the
angular momentum L
i
are interpreted, no longer
as differential operators in
i
, but as (2l þ 1)
(2l þ 1) matrices that act on the ‘‘spinor’’ . These
matrices are the transposes of the usual angular
momentum mat rices in angular momentum theory,
that is, (L
i
)
kk
0
= hk
0
jL
i
jki.
This is the final form of the Schro¨ dinger equation
after all reductions by all continuous symmetries
have been carried out. The fully reduced system has
3n 5 degrees of freedom (3n 6 for the shape
coordinates, and one for the ‘‘spinor’’ index k).
Reduction by Rotations: Geometrical
Description
The proper rotation group SO(3) acts on the OCS
by R
7!RR
, and on the TRCS by r
7!Rr
, where
R 2 SO(3). Rotations acting on the OCS do not
commute with translations, but the action preserves
the translation fibers, and thus can be projected onto
the TRCS.
The action of SO(3) on the TRCS is effective but
not free, that is, most orbits are diffeomorphic to
SO(3), but a subset of measure zero (the ‘‘singular’’
orbits) are diffeomorphic to S
2
or a single point.
Configurations of the n-particle system in which the
particles do not lie on a line (‘‘noncollinear shapes’’)
have SO(3) orbits, those in which the particles do lie
on a line but are not coincident have S
2
orbits, and
the n-body collision (a single shape) has an orbit that
is a single point. Thus, the action of SO(3) on the
TRCS foliates the TRCS into a (3n 6)-parameter
family of copies of SO(3), plus the singular orbits. If
we exclude the singular orbits, then the TRCS has the
structure of an SO(3) principal fiber bundle. In
general, the bundle is not trivial. Shape space may
be defined as the quotient space under the SO(3)
action. Omitting the singular shapes, shape space is
the base space of the bundle. The coordinates q
introduced above are coordinates on shape space.
The singular shapes and orbits are physically acces-
sible, and there are important questions regarding the
behavior of the system in their neighborhood.
The definition of a body frame is equivalent to the
choice of a section of the fiber bundle, generally
only locally defined over some region of shape
space. A configuration (a point in the TRC S) on the
section defines an orientat ion of the n-particle
system for the given shap e, which serves as a
reference orientation to which others can be
referred. We think of the reference orientation as
one in which the space and body frames coincide; in
other orientations of the same shape, the body frame
has been rotated with the body to a new orientation.
The choice of the section (body frame) allows us to
Quantum n-Body Problem 287

impose coordinates on each (nonsingular) rotation
fiber, that is, we label points on the fiber by the
rotation that takes us from the section to the actual
configuration in question. This is why a choice of
body frame is necessary before defining orienta-
tional coordinates. Sections are only defined locally.
Popular choices of body frame, such as the principal
axis frame, imply multivalued sections, unless
branch cuts are introdu ced. Orientational coordi-
nates are simply coordinates on the group manifold
SO(3), transferred to the nonsingular rotation fibers,
with the group identity element mapped onto the
point where the fiber intersects the section.
The metric tensor determines much of the geome-
try of the reduction by rotations. Since the metric on
the TRCS is SO(3)-invariant, horizontal subspaces in
the SO(3) fiber bundle (the TRCS minus the singular
orbits) can be defined as the spaces orthogonal to the
fibers (hence orthogonal to the vertical subspaces).
This is a standard construction in Kaluza–Klein
theories, which reappears here. Thus, the bundle has
a connection, induced by the metric.
The moment-of-inertia tensor is the metric tensor
restricted to a fiber, evaluated in a basis of left-
(body frame) or right-invariant (space frame) vector
fields on SO(3), which are transported to the fibers
to create a basis of vertical vector fields.
The coordin ate description of the connection is
the gauge potential A
, in which the index refers
to shape coordinates q
, and the components of the
3-vector A refer to the standard set of left- or right-
invariant vector fields on SO(3). The coordinate
representative of the curvature 2-form is conveni-
ently denoted by B
, defined by
B
¼
@A
@q
@A
@q
A
A
½18
where it is understood that body frame components
are used. Direct calculation shows that it is nonzero,
hence the fiber bundle is not flat, for any value of
n 3. The curvature form B
appears in the
classical equation of motion and in the quantum
commutation relations.
The field B
satisfies differential equations on
shape space that have the form of Yang–Mills field
equations. It is interesting that the sources of this
field are singularities of the monopole type, located
on the singular shapes. In the case n = 3, the source
is a single monopole located at the three-body
collision, which is similar to a Dirac monopole in
electromagnetic theory.
The (3n 6)-dimensional horizontal subspaces of
the TRCS are annihilated by three differential forms,
whose values on a velocity vector of the system are
the components of the classical angular momentum L
(body or space components, depending on the basis
of forms). Thus, horizontal motions are those for
which L = 0, and horizontal lifts of curves in shape
space are motions of the system with vanishing
angular momentum. Since angular momentum is
conserved, such motions are generated by the
classical equations of motion and are physically
allowed. For loops in shape space, the holonomy
generated by the horizontal lift is physically the
rotation that a flexible body experiences when it is
carried under conditions of vanishing angular
momentum from an initial shape, through intermedi-
ate shapes and back to the initial shape. An example
is the rotation generated by the ‘‘falling cat.’’
Since the metric on the TRCS is SO(3)-invariant,
it may be projected onto shape space, which there-
fore is a Riemannian manifold in its own right. The
projected metric is ds
2
= g
dq
dq
. This metric is
not flat (the Riemann curvature tensor is nonzero
for all values n 3). Geodesics in shape space have
horizontal lifts that are free particle motions (V = 0)
of zero angular momentum. Conversely, such
motions project onto geodesics on shape space.
A popular choice of body frame in molecular
physics is the Eckart frame, which has advantages
for the description of small vibrations and other
purposes. The section defining the Eckart frame is a
flat vector subspace of the TRCS of dimension 3n 6
that is orthogonal (horizontal) to a particular fiber
(over an equilibrium shape) at a particular
orientation.
The geometrical meaning of eqn [17] is that
rotations act on a set of wave functions that span
an irrep of SO(3) by multiplication by the represen-
tative element of the group. In standard physics
notation, l indexes the irrep, and m indexes the basis
vectors spanning the irrep. Thus, the values of these
wave functions at any point on the fiber are known
once their values are given at a reference point. A
convenient choice for the reference point is the point
on the section, and the wave functions
lk
are simply
the values of the
lm
on this reference point (with a
change of notation, m ! k). Thus, the wave func-
tions
lk
are properly not ‘‘wave functions on shape
space,’’ but rather wave functions on the section.
Shapespaceinthecasen = 3 is homeomorphic to
the region x
3
0ofR
3
,andinthecasen = 4toR
6
.
A convenient tool for understanding the structure
of shape space is by its foliation under the action of
the kinematic rotations, eqn [ 5]. The kinematic
rotations commute with ordinary rotations, and
hence have an action on shape space. This action
preserves the eigenvalues of the moment-of-inertia
tensor.
288 Quantum n-Body Problem

Concluding Remarks
The quantum n-body problem provides an interesting
example in which nonabelian gauge theories find
application in nonrelativistic quantum mechanics. The
fields E, A
,andg
, and fields derived from them such
as the curvature tensor B
and the Riemann curvature
tensor derived from g
, satisfy a complex set of
differential equations on shape space that can be
derived by considering the vanishing of the Riemann
tensor on the TRCS. The resulting field equations are
useful in perturbation theory, for example, in the study
of small vibrations of a molecule. This means of
constructing field equations on the base space of a
bundle is standard in Kaluza–Klein theories, which are
an important line of thinking in modern attempts to
understand gauge field theories in particle physics.
The rotations generated by flexible bodies of vanish-
ing angular momentum (the ‘‘falling cat’’) are an
example of a ‘ ‘geometric phase,’ ’ that is, a nonabelian
generalization of ‘‘Berry’s phase.’’ It is interesting how
the associated gauge potential A
in this problem plays
a role in the dynamics of the n-particle system.
The Hamiltonian [15] is the starting point for
numerous practical calculations, for example, the
numerical evaluation of energy levels, cross-sections
and reaction rates in molecular physics. One can
compute, for example, chemical reaction rates for
molecular processes in atmospheric or astrophysical
contexts, where experiments would be difficult or
expensive. The numerical analysis of the Hamiltonian
[15] usually requires the introduction of a basis set and
the processing of large matrices. Current techniques
for basis set selection are not very satisfactory, and this
is an area where research into wavelets and numerical
analysis could have an impact.
See also: Bosons and Fermions in External Fields;
Gravitational N-Body Problem (Classical); Integrable
Systems: Overview.
Further Reading
Abraham R and Marsden JE (1978) Foundations of Mechanics,
2nd edn. Reading, MA: Benjamin/Cummings.
Aquilanti V and Cavalli S (1986) Coordinates for molecular
dynamics: orthogonal local frames. Journal of Chemical
Physics 85: 1355–1361.
Berry MV (1984) Quantal phase factors accompanying adiabatic
changes. Proceedings of the Royal Society of London. Series A
392: 45–57.
Coquereaux R (1988) Riemannian Geometry, Fiber bundles,
Kaluza–Klein Theories and All That. World Scientific Lecture
Notes in Physics, vol. 16. Singapore: World Scientific.
Ezra GS (1982) Symmetry Properties of Molecules. New York:
Springer.
Iwai T (1987) A gauge theory for the quantum planar three-body
problem. Journal of Mathematical Physics 28: 964–974.
Kupperman A (1993) A new look at symmetrized hyperspherical
coordinates. Advances in Molecular Vibrations and Collision
Dynamics vol. 2B: 117–186.
Littlejohn RG and Reinsch M (1997) Gauge fields in the
separation of rotations and internal motions in the n-body
problem. Reviews of Modern Physics 69: 213–275.
Mead CA (1992) The geometric phase in molecular systems.
Reviews of Modern Physics 64: 51–85.
Mitchell KA and Littlejohn RG (2000) Kinematic orbits and the
structure of the internal space for systems of five or more
bodies. Journal of Physics A 33: 1395–1416.
Naber GL (1997) Topology, Geometry and Gauge Fields.
New York: Springer.
Wilson EB Jr., Decius JC, and Cross PC (1955) Molecular
Vibrations: the Theory of Infrared and Raman Vibrational
Spectra. New York: McGraw-Hill.
Quantum Phase Transitions
S Sachdev, Yale University, New Haven, CT, USA
ª 2006 Elsevier Ltd. All rights reserved.
Introduction
The study of second-order phase transitions at
nonzero temperatures has a long and distinguished
history in statistical mechanics. Many key physical
phenomena, such as the loss of ferromagnetism
in iron at the Curie temperature or the critical
endpoint of CO
2
, are now understood in precise
quantitative detail. This understanding began in the
work of Onsager, and is based upon what may now
be called the Landau–Ginzburg –Wilson theory.
The content of this sophisticated theory may be sum-
marized in a few basic principles: (1) The collective
thermal fluctuations near second-order transitions
can be accurately described by simple classical
models, that is, quantum-me chanical effects can be
entirely neglecte d. (2) The classical models identify
an ‘‘order parameter,’’ a collective variable which
has to be treated on par with other thermodynamic
variables, and whose correlations exhibit distinct
behavior in the phases on either side of the
transition. (3) The thermal fluctuations of the
order parameter near the transition are controlled
by a continuum field theory whose structure is
usually completly dictated by simple symmetry
considerations.
Quantum Phase Transitions 289

This article will not consider such nonzero
temperature phase transitions, but will instead
describe second-order phase transitions at the
absolute zero of temperature. Such transitions are
driven by quantum fluctuations mandated by the
Heisenberg uncertainty principle: one can imagine
moving across the quantum critical point by
effectively ‘‘tuning the value of Planck’s constant,
h.’’ Clearly, quantum mechanics plays a central role
at such transitions, unlike the situation at nonzero
temperatures. The reader may object that absolute
zero is an idealization not realized by any experi-
mental system; hence, the study of quantum phase
transitions is a subject only of academic interest. As
we will illustrate below, knowledge of the zero-
temperature quantum critical points of a system is
often the key to understanding its finite-temperature
properties, and in some cases the influence of a zero-
temperature critical point can be detected at
temperatures as high as ambient room temperature.
We will begin in the following section by
introducing some simple lattice models which
exhibit quantum phase transitions. Next the theory
of the critical point in these models is based upon
a natural extension of the Landau–Ginzburg–Wilson
(LGW) method, and this will be presented. This
section will also describe the consequences of a zero-
temperature critical point on the nonzero tempera-
ture prop erties. Finally, we will consi der more
complex models in which quantum interference
effects play a more subtle role, and which cannot
be described in the LGW framework: such quantum
critical points are likely to play a central role in
understanding many of the correlated electron
systems of current interest.
Simple Models
Quantum Ising Chain
This is a simple model of N qubits, labeled by the
index j = 1, ..., N. On each ‘‘site’’ j there are two
qubit quantum states "
ji
j
and #
ji
j
(in practice, these
could be two magnetic states of an ion at site j in a
crystal). The Hilbert space therefore consists of 2
N
states, each consisting of a tensor product of the
states on each site. We introduce the Pauli spin
operators, ^
j
, on each site j, with = x, y, z:
^
x
¼
01
10
; ^
y
¼
0 i
i 0
^
z
¼
10
0 1
½1
These operators clearly act on the two states of the
qubit on site j, and the Pauli operators on different
sites commute.
The quantum Ising chain is defined by the simp le
Hamiltonian
H
I
¼J
X
N 1
j¼1
^
z
j
^
z
jþ1
gJ
X
N
j¼1
^
x
j
½2
where J > 0 sets the energy scale, and g 0isa
dimensionless coupling constant. In the thermody-
namic limit (N !1), the ground state of H
I
exhibits
a second-order quantum phase transition as g is
tuned across a critical value g = g
c
(for the specific
case of H
I
it is known that g
c
= 1), as we will now
illustrate.
First, consider the ground state of H
I
for g 1.
At g = 0, there are two degenerate ‘‘ferromagnetically
ordered’’ ground states
*
ji
¼
Y
N
j¼1
"
ji
j
; +
ji
¼
Y
N
j¼1
#
ji
j
½3
Each of these states breaks a discrete ‘‘Ising’’
symmetry of the Hamiltonian rotations of all
spins by 180
about the x-axis. These states are
more succinctly characterized by defining the
ferromagnetic moment, N
0
,by
N
0
¼*
hj
^
z
j
*
ji
¼+
hj
^
z
j
+
ji
½4
At g = 0 we clearly have N
0
= 1. A key point is
that in the thermodynamic limit, this simple picture
of the ground state survives for a finite range of
small g (indeed, for all g < g
c
), but with 0 < N
0
< 1.
The quantum tunneling between the two ferromag-
netic ground states is exponentially small in N (and
so can be neglected in the thermodynamic limit),
and so the ground state remains 2-fold degenerate
and the discrete Ising symmetry remains broken.
The change in the wave functions of these states
from eqn [3] can be easily determined by perturba-
tion theory in g: these small g quantum fluctuations
reduce the value of N
0
from unity but do not cause
the ferromagnetism to disappear.
Now consider the ground state of H
I
for g 1.
At g = 1 there is a single nondegenerate ground
state which fully preserves all symmetries of H
I
:
)i¼2
N=2
Y
N
j¼1
"ji
j
þ#ji
j
½5
It is easy to verify that this state has no ferromagnetic
moment N
0
=
)
^
z
j
)i= 0. Further, perturbation
theory in 1=g shows that these features of the ground
state are preserved for a finite range of large g values
290 Quantum Phase Transitions
(indeed, for all g > g
c
). One can visualize this ground
state as one in which strong quantum fluctuations
have destroyed the ferromagnetism, with the local
magnetic moments quantum tunneling between ‘‘up’’
and ‘‘down’’ on a timescale of order h=J.
Given the very distinct signatures of the small g
and large g ground states, it is clear that the ground
state cannot evolve smoothly as a function of g.
These must be at least one point of nonanalyticity as
a function of g: for H
I
it is known that there is only
a single nonanalytic point, and this is at the location
of a second-order quantum phase transition at
g = g
c
= 1.
The character of the excitations above the ground
state also undergoes a qualitative change across the
quantum critical point. In both the g < g
c
and g > g
c
phases, these excitations can be described in the
Landau quasiparticle scheme, that is, as super-
positions of nearly independent particle-like
excitations; a single well-isolated quasiparticle has
an infinite lifetime at low excitation energies.
However, the physical nature of the quasiparticles
is very different in the two phases. In the ferromag-
netic phase, with g < g
c
, the quasiparticles are
domain walls between regions of opposite
magnetization:
j; j þ 1
ji
¼
Y
j
k¼1
"
ji
k
Y
N
‘¼jþ1
#
ji
‘
½6
This is the exact wave function of a stationary
quasiparticle excitation between sites j and j þ 1at
g = 0; for small nonzero g the quasiparticle acquires
a ‘‘cloud’’ of further spin-flips and also becomes
mobile. However its qualitative interpretation as a
domain wall between the two degenerate ground
states remains valid for all g < g
c
. In contrast, for
g > g
c
, there is no ferromagnetism, and the non-
degenerate paramagnetic state has a distinct quasi-
particle excitation:
j
ji
¼ 2
N=2
"
ji
j
#
ji
j
Y
k6¼j
"
ji
k
þ#
ji
k
½7
This is a stationary ‘‘flipped spin’’ quasiparticle at
site j, with its wave function exact at g = 1.Again,
this quasiparticle is mobile and applicable for all
g > g
c
, but there is no smooth connection between
eqns [7] and [6].
Coupled Dimer Antiferromagnet
This model also involves qubits, but they are now
placed on the sites, j, of a two-dimensional square
lattice. Models in this class describe the magnetic
excitations of many experimentally important spin
gap compounds.
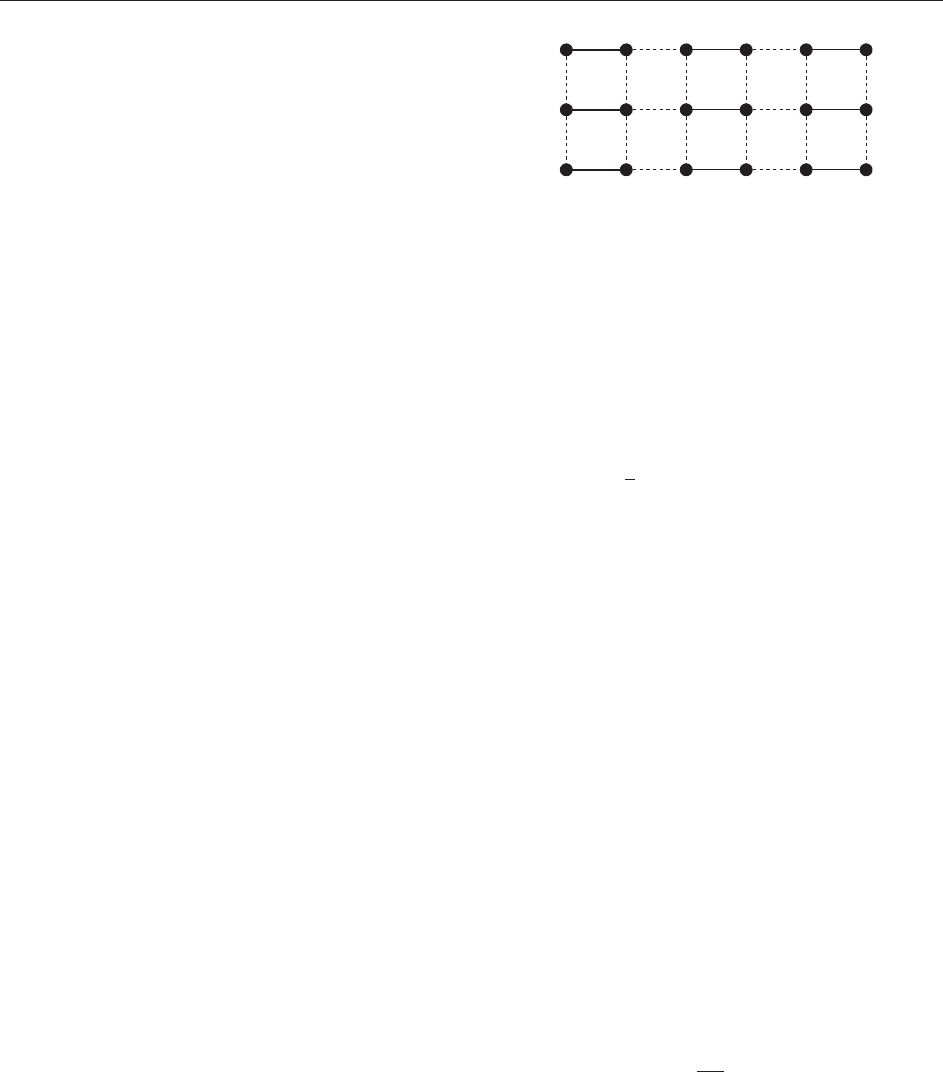
The Hamiltonian of the dimer antiferromag net is
illustrated in Figure 1 and is given by
H
d
¼J
X
hjki2A
^
x
j
^
x
k
þ ^
y
j
^
y
k
þ ^
z
j
^
z
k
þ
J
g
X
hjki2B
^
x
j
^
x
k
þ ^
y
j
^
y
k
þ ^
z
j
^
z
k
½8
where J > 0 is the exchange constant, g 1 is the
dimensionless coupling, and the set of nearest-
neighbor links A and B are defined in Figure 1.An
important property of H
d
is that it is now invariant
under the full O(3) group of spin rotations under
which the ^
transform as ordinary vectors (in
contrast to the Z
2
symmetry group of H
I
). In
analogy with H
I
, we will find that H
d
undergoes a
quantum phase trans ition from a paramagnetic
phase which preserves all symmetries of the
Hamiltonian at large g, to an antiferromagnetic
phase which breaks the O(3) symmetry at small g.
This transition occurs at a critical value g = g
c
,
and the best current numerical estimate is
1=g
c
= 0.52337(3).
As in the previous section, we can establish the
existence of such a quantum phase transition by
contrasting the disparate physical properties at large
g with those at g 1. At g = 1 the exact ground
state of H
d
is
spin gap
ji
¼
Y
hjki2A
1
ffiffiffi
2
p
"
ji
j
#
ji
k
#
ji
j
"
ji
k
½9
and is illustrated in Figure 2. This state is non-
degenerate and invariant under spin rotations, and
so is a paramagnet: the qubits are paired into spin
singlet valence bonds across all the A links.
The excitations above the ground state are
created by breaking a valence bond, so that the
pair of spins form a spin triplet with total spin
S = 1 – this is illustrated in Figure 3. It costs a large
energy to create this excitation, and at finite g the
Figure 1 The coupled dimer antiferromagnet. Qubits (i.e.,
S = 1=2 spins) are placed on the sites, the A links are shown as
full lines, and the B links as dashed lines.
Quantum Phase Transitions 291