Francoise J.-P., Naber G.L., Tsun T.S. (editors) Encyclopedia of Mathematical Physics
Подождите немного. Документ загружается.


more appropriate if one needs to recover unknown
coefficients of the wave equation in – it can be
realized in terms of numerical algorithms.
Extensions of the Method
Electromagnetic waves are also well suited for
coordinatization and for constructing the wave copy
(
˜
,
˜
d). An appropriate version of the amplitude
formula also exists for the system governed by the
Maxw ell equation s (see Further Reading) . At pr esent
(2004), the applicability of the BC method to three-
dimensional inverse problems of elasticity theory is
still an ope n question. The following hypothesis
concerns the Lame´ system: the wave coordinatizati on
procedure (steps 1–3) using the elastic waves instead
of the above u
f ,0
, gives rise to the copy of R
3
endowed wi th the metric jdxj
2
=c
2
p
where
c
p
=
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
( þ 2)=
p
is the speed of the pressure waves.
The concept of model is used for solving inverse
problems for the heat and Schro¨ dinger equations
(Avdonin and Belishev, 1995–2004), as well as for
the problem of boundary data continuation
(Belishev 2001, Kurylev and Lassas 2002). A variant
of the BC method allows one to recover not only the
manifold but also the Schro¨ dinger type operat ors on
it and/or the dissipative term in the scalar wave
equation (Kurylev and Lassas 1993– 2003).
An appropriate version of the amplitude formula
solves the inverse problem for one-dimensional two-
velocity dynamical system which describes the waves
consisting of two modes propagating with different
speeds and interacting with each other (Belishev,
Blagoveschenskii, Ivanov, 1997–2000).
One more variant of coordinatization going back
to the first paper on the BC method, associates with
points x 2 the Dirac measures
x
; then, their
images
˜
x
are identified via suitable models. This
variant solves inverse problems on graphs and the
two-dimensional elliptic Calderon problem. The
reader is referred to articles by the present author
listed in Fur ther Reading.
Within the scope of the method, one derives some
natural analogs of the classical Gelfand–Levitan–
Krein–Marchenko equations (Belishev, 1987–2001).
Also, an appropriate analog solves the kinematic
inverse problem for a class of two-dimensional
manifolds (Pestov 2004).
There exists an abstract version of the
approach, embedding the BC method into the
framework of linear system theory (Belishev
2001). The method is also related to the problem
of triangular factorization of operators (Belishev
and Pushnitski 1996).
Numerical algorithms for solving two-dimensional
spectral and dynamical inverse problems for the wave
equation u
tt
u = 0 which recover the variable
density have been developed and tested (Filippov,
Gotlib, Ivanov, 1994–1999).
See also: Dynamical Systems and Thermodynamics;
Geophysical Dynamics; Inverse Problem in Classical
Mechanics.
Further Reading
Belishev MI (1988) On an approach to multidimensional inverse
problems for the wave equation. Soviet Mathematics. Doklady
36(3): 481–484.
Belishev MI (1996) Canonical model of a dynamical system with
boundary control in the inverse problem of heat conductivity.
St. Petersburg Mathematical Journal 7(6): 869–890.
Belishev MI (1997) Boundary control in reconstruction of
manifolds and metrics. Inverse Problems 13(5): R1–R45.
Belishev MI (2001) Dynamical systems with boundary control:
models and characterization of inverse data. Inverse Problems
17: 659–682.
Belishev MI (2002) How to see waves under the Earth surface
(the BC-method for geo physicists). I n: Kabanikhin SI and
Romanov VG (eds.) Ill-Posed and Inverse Problems, pp. 67–84.
Utrecht/Boston: VSP.
Belishev MI (2003) The Calderon problem for two-dimensional
manifolds by the BC-method. SIAM Journal of Mathematical
Analysis 35(1): 172–182.
Belishev MI (2004) Boundary spectral inverse problem on a class
of graphs (trees) by the BC-method. Inverse Problems
20(3): 647–672.
Belishev MI and Glasman AK (2001) Dynamical inverse problem
for the Maxwell system: recovering the velocity in the regular
zone (the BC-method). St. Petersburg Mathematical Journal
12(2): 279–319.
Belishev MI and Gotlib VYu (1999) Dynamical variant of the
BC-method: theory and numerical testing. Journal of Inverse
and Ill-Posed Problems 7(3): 221–240.
Belishev MI, Isakov VM, Pestov LN, and Sharafutdinov VA
(2000) On reconstruction of metrics from external electro-
magnetic measurements. Russian Academy of Sciences.
Doklady. Mathematics 61(3): 353–356.
Belishev MI and Ivanov SA (2002) Characterization of data of
dynamical inverse problem for two-velocity system. Journal of
Mathematical Sciences 109(5): 1814–1834.
Belishev MI and Lasiecka I (2002) The dynamical Lame´ system:
regularity of solutions, boundary controllability and boundary
data continuation. ESAIM COCV 8: 143–167.
Katchalov A, Kurylev Y, and Lassas M (2001) Inverse Boundary
Spectral Problems. Chapman and Hall/CRC Monographs and
Surveys in Pure and Applied Mathematics, vol. 123. Boca
Raton, FL: Chapman and Hall/CRC.
Boundary Control Method and Inverse Problems of Wave Propagation 345

Boundary-Value Problems for Integrable Equations
B Pelloni, University of Reading, UK
ª 2006 Elsevier Ltd. All rights reserved.
Introduction
Integrable equations are a special class of nonlinear
equations arising in the modeling of a wide variety
of physical phenomena. It has been argued that
integrable PDEs are in a certain, specific sense
‘‘universal’’ models for physical phenomena invol-
ving weak nonlinearity. Indeed, integrable equations
are obtained by a procedure involving rescaling and
an asymptotic expansion from very large classes of
nonlinear evolution equations, which preserves
integrability while retaining in the limit weakly
nonlinear effects. For this reason, integrable equa-
tions are a very important class of PDEs. Important
examples are the nonlinear Schro¨ dinger (NLS)
equation
iq
t
þ q
xx
2jqj
2
q ¼ 0;¼1 ½1
the Korteweg–deVries (KdV) equation
q
t
þ q
x
q
xxx
þ 6qq
x
¼ 0 ½2
the modified KdV (mKdV) equation
q
t
q
xxx
6q
2
q
x
¼ 0;¼1 ½3
and the sine-Gordon (SG) equation in light-cone or
laboratory coordinates
q
xt
þ sin q ¼ 0orq
tt
q
xx
þ sin q ¼ 0 ½4
A general method for solving the initial-value
problem for integrable equations in one space
dimension was discovered in 1967, when in a
pioneering and much celebrated work (Gardner
et al. 1967), the initial-value problems for KdV
with decaying initial condition was completely
solved. Soon afterwards, it was understood that
this method, now known as the ‘‘inverse scattering
transform,’’ is of more general applicability. Indeed,
it can be applied to those nonlinear equations that
can be written as the compatibility condition of a
pair of linear eigenvalue equations. The method of
solution for the Cauchy problem essentially relies on
the possibility of expressing the equation through
this pair, now called a Lax pair after the work of
Lax (1968), who first clarified the connection.
Zakharov and Shabat (1972) constructed such a
pair for the NLS equation, and in subsequent years
the Lax pairs associated with all important integr-
able equations in one and two spatial variables were
constructed. These include the NLS, sG, mKdV,
Davey–Stewartson I and II, and Kamdotsev–
Petviashvili I and II equations.
There is no universally accepted definition of an
integrable PDE, but on account of the above results,
the existence of a Lax pair can be taken as the
defining property of such equations. In the course of
the 1970s, the inverse scattering transform was
applied to solve the initial-value (Cauchy) problem
for many integrable equations. In principle, there is
no obstruction to solving analytically the initial-value
problem by the inverse scattering transform as soon
as a Lax pair is constructed for the equation, and
appropriate decaying initial conditions are pre-
scribed. T he solution i s then c haracterized in
terms of a certain integral equation. This approach
is equivalent to associating with t he initial-value
problem a classical problem in complex analysis,
namely a matrix Riemann–H ilbert problem,
defined in the complex spectral space. This point
of view is currently taken by many authors as it
provides a unifying and very flexible framework for
the analysis.
After the success of the inverse scattering trans-
form in solving the Cauchy problem, it was natural
to attempt to generalize the approach to boundary-
value pro blems. To describe the difficulties involved
in this genera lization, consider the case of evolution
equations in one space and one time dimensions.
The independent variables can be denoted by (x, t),
with t > 0 representing time. While the initial-value
problem is posed on the full real line, hence for
x 2 (1, 1), the simplest boundary-value problem
is posed on a half-line, for x 2 (0, 1 ). In addition
to initial conditions for initial time t = 0, it is
necessary to prescribe conditions at the boundary
x = 0. The number of conditions that must be
prescribed to obtain a problem which admits a
unique solution depends on the particular equation,
but for evolution equation it is roughly equal to
half the number of x-derivatives involved in the
equation. For example, for the NLS equation, a
well-posed problem is defined as soon as one
boundary condition at x = 0 is prescribed; hence a
typical boundary-value problem for this equation is
obtained, for example, when q(x,0)= q
0
(x) and
q(0, t) = g
0
(t) are prescribed and compatible, so that
q
0
(0) = g
0
(0). It follows that, while q
xx
(0, t) can be
computed from the equation, q
x
(0, t) is not imme-
diately known. An even more difficult situation
arises for the KdV equation [2] (with the þ sign),
for which a well-posed problem is again defined as
soon as one boundary condition is prescribed, so
that there are two unknown boundary values.
346 Boundary-Value Problems for Integrable Equations

Because of this simple fact, a straightforward
application of the ideas of the inverse scattering
transform immediately encounters one crucial diffi-
culty. This transform method yields an integral
representation of the solution which involves not
only the given boundary conditions f (t), but also the
other ‘‘unknown’’ boundary values – in our example
for the NLS equation, the function q
x
(0, t). The
problem of characterizing these unknown boundary
values has impeded progress in this direction for over
thirty years.
On account of their physical significance, various
boundary-value problems for the KdV equation have
been considered, and classical PDE techniques (not
specific to integrable models) have been used to
establish existence and uniqueness results (Bona
et al. 2001, Colin and Ghidaglia 2001, Colliander
and Kenig 2001). These approaches, and in parti-
cular the approach of Colliander and Kenig, are
quite general and possibly of wide applicability, and
give global existence results in wide functional
classes. However, they do not rely on integrability
properties. Indeed, none of these results use the
integrable structure of the equation in any funda-
mental or systematic way. However, the fact that
these equations are integrable on the full line implies
very special properties that should be exploited in
the analysis and it is natural to try to generalize the
inverse scattering transform approach.
Such a generalization is sometimes directly possi-
ble. For example, it has been used for studying the
problem on the half-line for the hyperbolic version
of the sG equation [4a] which does not involve
unknown boundary values (Fokas 2000, Pelloni). It
has also been used to study some specific boundary-
value problems for the NLS equation, for example,
for homogeneous Dirichlet or Neumann conditions,
when it is possible to use even or odd extensions of
the problem to the full line (Ablowitz and Segur
1974), or more recently in Degasperis et al. (2001).
In the latter case, however, the unknown boundary
values are characterized through an integral Fred-
holm equation, which does not admit a unique
solution. Some special cases of boundary-value
problems for the KdV equation (Adler et al. 1997,
Habibullin 1999) and elliptic sG (Sklyanin 1987)
have also been studied via the inverse scattering
transform. However all the examples considered are
nongeneric, and it has recently been shown (Fokas,
in press) that the boundary conditions chosen fall in
the special class of the so-called ‘‘linearizable’’
boundary conditions, for which the problem can be
solved as if it were posed on the full line. One
cannot hope to use similar methods to solve the
problem with generic boundary conditions.
Recently, Fokas (2000) introduced a general
methodology to extend the ideas of the inverse
scattering transform to boundary-value problems.
This methodology provides the tools to analyze
boundary-value problems for integrable equations to
a considerable degree of generality. We note as a
side remark that linear PDEs are trivially integrable,
in the sense of admitting a Lax pair (in this case the
Lax pair can be found algorithmically, while the
construction of the La x pair associated with a
nonlinear equation is by no means trivial). As a
consequence of this remark, the extension of the
inverse scattering transform also provide s a meth od
for solving boundary-value problems for a large
variety of linear PDEs of mathematical physics.
What follows is a general description of the
approach of Fokas, considering, for the sake of
concreteness, the case of an integrabl e PDE in the
two variables (x,t) which vary in the domain D
(typically, for an evolution problem D = (0, 1)
(0, T)). We assume that q(x, t) denotes the unique
solution of a boundary-value problem posed for
such an equation.
The method consists of the following steps.
1. Write the PDE as the compatibility condition of a
Lax pair. This is a pair of linear ODEs for the
function = (x, t, k) involving the solution
q
(x, t) of the PDE, the derivatives of this solution,
and a complex parameter k, called the spectral
parameter. This can be done algorithmically for
linear PDEs, and in this case (x, t,k) is a scalar
function. For nonlinear inte grable PDEs, (x, t, k)
is in general a matrix-valued function.
The equivalence of the PDE with a Lax pair
can be reformulated in the language of differ-
ential forms, and in this language it is easier to
describe the methodology in general. Assume
then that (x, t, k) is a differential 1-form
expressed in terms of a function q(x, t) and its
derivatives, and of a complex variable k, and one
which is characterized by the property that
d=0 if and only if q(x, t) satisfies the given
PDE. The closure of the form yields the two
important consequences 2(a) and 2(b) below.
2. (a) Since the domain D under consideration is
simply connected, the closed form is also exact;
hence, it is possible to find the particular, 0-form
(x, t,k), solving d =. In particular, (x, t, k)
can be chosen to be sectionally bounded with
respect to k by solving either a Riemann–Hilbert
problem or a d-bar problem in the complex
spectral k plane, and the solution (x, t
, k)is
then expressed in terms of certain ‘‘spectral
functions’’ depending on all the boundary values
Boundary-Value Problems for Integrable Equations 347

of the solution q(x, t ) of the PDE. The function
q(x, t) can then be expressed in terms of
(x, t, k). (b) The integral of along the
boundary of the domain D vanishes. This yields
an integral constraint between all boundary
values of the solution o f the PDE, which
becomes an algebraic constraint for the spectral
functions. The resulting algebraic identity is
called the ‘‘global relation.’’
3. The last step is the analysis the k-invariance
properties of the global relation. This analysis
yields the characterization of the spectral func-
tions in terms only of the given bounda ry
conditions.
The crucial and most difficult step in the solution
process is the characterization described above. The
analysis required depends on the type of problem
under consideration. For nonlinear integrable evolu-
tion PDEs posed on the half-line x > 0, in general
the characterization mentioned in step (3) involves
solving a system of nonlinear Volterra integral
equations. This is an important difference from the
case of the Cauchy problem, where the solution is
given by a single integral equation where all the
terms are explicitly known.
The method outlined above has been applied
successfully to solve a variety of boundary-value
problems for linear and integrable nonlinear PDEs.
For concreteness, here the focus is on the important
case of integrable evolution PDEs in one space, which
illustrates clearly the generalities of this method.
Integrable Evolution Equations in One
Space Dimension
The crucial property of integrable PDEs which is
used in the inverse scattering transform approach to
solve the initial-value problem is the fact that they
can be written as the compatibility of a Lax pair.
Many integrable evolution equations of physical
significance (such as NLS, KdV, sG, and mKdV)
admit a Lax pair of the form
x
þ if
1
ðkÞ
3
¼Qðx; t; kÞ
t
þ if
2
ðkÞ
3
¼
~
Qðx; t; kÞ
½5
where (x, t, k)isa2 2 matrix,
3
= diag( 1, 1),
f
i
(k), i = 1, 2, are analytic functions of the complex
parameter k, and Q,
~
Q are analytic functions of k,
of the function q(x, t) (and of its complex conjugate
q(x, t) for complex-valued problems) and of its
derivatives. For example, the NLS equation [1] is
equivalent to the compatibility condition of the pair
x
þ ik
3
¼ Q; Q ¼
0 q
q 0
t
þ 2ik
2
3
¼ð2kQ iQ
x
3
ijqj
2
3
Þ
½6
The first step towards a systematic new approach to
solving boundary-value problem was the work of
Fokas and Its, who associated the boundary-value
problem for NLS on the half-line to a single
Riemann–Hilbert problem determined by both
equations in the Lax pair. The jump determining
this Riemann–Hilbert problem has an explicit
exponential dependence on both x and t. This differs
from the classical inverse scattering approach, in
which the x-part of the Lax pa ir is used to determine
an x-transform with t-depende nt scattering data,
and the t-part of the Lax pair is then exploited to
find the time evolution of these data. The work of
Fokas and Its led to the understanding that both
equations in the Lax pair [6] must be co nsidered in
order to construct a spectral transform appropriate
to solve boundary-value problems. Fokas (2000)
reviews his systematic way to solve these problems
by performing the simultaneous spectral analysis of
both equations in the Lax pair. The transform thus
obtained, which is a nonlinearization of the Fourier
transform, precisely generalizes the inverse scatter-
ing transform.
This simultaneous analysis also leads naturally to
the identification of the ‘‘gl obal relation’’ which
holds between initial and boundary data, and which
plays an essential role in deriving an expression for
the solution of the problem which does not involve
unknown boundary values.
The Riemann–Hilbert problem with explicit ( x, t)
dependence, the global relation, and the invariance
properties of the latter with respect to the spectral
parameter are the fundamental ingredients of this
systematic approach to solve boundary-value pro-
blems for integrable equations.
The steps involved in this method are summar-
ized in the introduction. While steps (1) and (2)
can be described generally, and, once the Lax pair
is identified, c an be performed algorithmically (at
least under the assumption that the solution of the
PDE exists), t he last step is the most difficult part
of the analysis, and it needs to be considered
separately for each given problem. H owever, it is
this step that yields the effective characte rizat ion
of the solution.
The results obtained for the particular case of eqn
[1] are reviewed in detail in the next section, as they
provide an important example, which can be
generalized without any conceptual difficulty to
eqns [2]–[4].
348 Boundary-Value Problems for Integrable Equations

The NLS Equation
As already ment ioned, the initial-value problem for
NLS was solved, for decaying initial condition, by
Zakharov and Shabat, and studied in depth by many
others. However, by the mid-1990s only a handful
of papers had been written on the solution of the
boundary-value problem posed on the half-line, all
on a specific example or aspect of the problem, or
attempts at solving the problem using general PDE
techniques.
For this equation, the approach of Fokas yields
the following results. Let the com plex-valued
function q(x, t) satisfy the NLS equation [1],for
x > 0andt > 0, for prescribed one initial and one
boundary conditions. For the sake of concreteness,
we select the specific initial and boundary
conditions
qðx; 0 Þ¼q
0
ðxÞ2SðR
þ
Þ
qð0; tÞ¼g
0
ðtÞ2SðR
þ
Þ
q
0
ð0Þ¼g
0
ð0Þ
½7
where S denotes the space of Schwartz functions
(similar resul ts hold for different choices of bound-
ary conditions, and less restrictive function classes).
The solution of this initial boundary-value (IBV)
problem can be constructed as follows (Fokas 2000,
2002; in press):
Given q
0
(x) construct the spectral functions
{a(k), b(k)}. These functions are defined by
aðkÞ¼
2
ð0; k Þ; bðkÞ¼
1
ð0; kÞ
where the vector (x, k) with components
1
(x, k)
and
2
(x, k) is the following solution of the
x-problem of the associated Lax pair evaluated
at t = 0:
x
þik
3
¼ Qðx; 0; kÞ; 0 < x < 1; Im k 0
ðx; kÞ¼e
ikx
0
1
þoð1Þ
as x !1
Qðx; 0; kÞ¼
0 q
0
ðxÞ
q
0
ðxÞ 0
(
3
and Q(x, t , k) are defined after eqns [5] and [6],
respectively).
Given q
0
(x) and g
0
(t) characterize g
1
(t) by the
requirement that the spectral functions
{A(t, k), B(t, k)} satisfy the global relation
Bðt; kÞRðkÞAðt; kÞ¼e
4ik
2
t
cðt; kÞ
aðkÞ
RðkÞ¼
bðkÞ
aðkÞ
; t 2½0; T; k 2
D
½8
where D denotes the first quadrant of the
complex k-plane:
D ¼fkjRe k > 0; Im k > 0g
D denotes the closure of D, and c(t, k)isa
function of k analytic in D and of order O(1=k)
as k !1. The spectral functions are defined by
Aðt; kÞ¼e
2ik
2
t
2
ðt;
kÞ;
Bðt; kÞ¼e
2ik
2
t
1
ðt; kÞ
½9
where the vector (t, k) with components
1
and
2
is the following solution of the t-problem of
the associated Lax pair evaluated at x = 0:
t
þ 2ik
2
3
¼
~
Qð0; t; kÞ
0 < t < T; k 2 C
ð0; kÞ¼
0
1
~
Qð0; t; kÞ¼
jg
0
ðtÞj
2
2kg
0
ðtÞþig
1
ðtÞ
2k
g
0
ðtÞi
g
1
ðtÞjg
0
ðtÞj
2
!
½10
Given a(k), b(k) and A(k), B(k), define a 2 2
matrix Riemann–Hilbert problem. This problem
has the distinctive feature that its jump has
explicit (x, t) dependence in the exponential
form of exp {ikx þ 2ik
2
t}. Determ ine q(x , t)in
terms of the solution of this Riemann–Hilbert
problem by using the fact that these functions
are related by the Lax pair. Then the function
q(x, t) solves the IBV problem [1]–[7] with
q(x,0)= q
0
(x), q(0, t) = g
0
(t), and q
0
x
(0, t) = g
1
(t).
The above construction can be summarized in the
following theorem (Fokas 2002):
Theorem 1 Consider the boundary-value problem
for the NLS equation [1] determined by the conditions
[7]. Let a(k), b(k) be given by [8], and suppose that
there exists a function g
1
(t) such that if A(k), B(k) are
defined by [9], then the global relation [8] holds.
Let M(x, t, k) be the solut ion of the 2 2
Riemann–Hilbert problem with jump on the real
and imaginary axes given by
M
(x, t, k) = M
þ
(x, t, k)J(x, t, k) with M = M
in
the second and fourth quadrants of C, M = M
þ
in the
first and third quadrants of C, and J(x, t, k) is defined
in terms of a, b, A, B and the exponential e
ikx2ik
2
t
:
M = I þ O(1=k) as k !1and has appropriate
residue conditions if there are poles
Then M(x,t,k) exists and is unique, and
qðx; tÞ¼2i lim
k!1
ðkMðx; t; kÞÞ
12
Boundary-Value Problems for Integrable Equations 349
The result above relies on characterizing the
unknown boundary value g
1
(t) a priori by requiring
that the global relation hold. Recently, substantial
progress has been made in this direction in the case of
integrable nonlinear evolution equations, in particu-
lar of NLS. Namely Fokas (in press) contains an
effective description of the map assigning to each
given q(x,0)= q
0
(x)andg
0
(t) = q(0, t) a unique value
for q
x
(0, t) (called the Dirichlet to Neumann map) for
theNLS,aswellasforaversionoftheKorteweg–
deVries and sG equations. We state below the
relevant theorem for the case of the NLS equation.
Theorem 2 Let q(x, t) satisfy the NLS equation on
the half-line 0 < x < 1, t > 0 with the initial and
boundary conditions [7]. Then g
1
(t):= q
x
(0, t) is
given by
g
1
ðtÞ¼
g
0
ðtÞ
Z
@D
e
2ik
2
t
ð
2
ðt;kÞ
2
ðt;kÞÞdk
þ
4i
Z
@D
e
2ik
2
t
kRðkÞ
2
ðt;
kÞdk
þ
2i
Z
@D
e
2ik
2
t
k½
1
ðt;kÞ
1
ðt; kÞþig
0
ðtÞðÞdk
with =(
1
,
2
)
given by the solution of [10]. The
Neumann datum g
1
(t) is unique and exists globally
in t.
This result yields a rigorous proof of the global
existence of the solution of boundary-value pro-
blems on the half-line for the NLS equation. There-
fore, the assumption in Theorem 1 that a suitable
function g
1
(t) exists can be dropped.
Generalizations and Summary of Results
Results analogous to the ones presented in the
previous section can be phrased exclusively in terms
of integral equations rather than in terms of
Riemann–Hilbert problems, as done for example in
Khruslov and Kotlyarov (2003). This is the point of
view of the school of Gelfand and Marchenko, and in
this setting the functions are given in the so-called
Gelfand–Levitan–Marchenko representation. Results
on boundary-value problems for the NLS equation
using this representation have been obtained only
under additional assumptions on the unknown part
of the boundary values. It was only after the idea that
the x-andt-parts of the spectral equations should be
treated simultaneously that this approach yielded
complete results. However, the Gelfand–Levitan–
Marchenko representation yields a crucial simplifica-
tion for deriving the explicit form of the Dirichlet to
Neumann map and proving Theorem 2.This
representation has now been derived for all equations
[1]–[3],seeFokas (in press).
The analysis of the invariance properties of the
global relation with respect to k also yields the
characterization of all the boundary conditions for
which the transform obtained to represent the solution
linearizes. For these boundary conditions, called
linearizable, the solution can be represented as
effectively as for the Cauchy problem. For example,
the linearizable boundary conditions for the NLS
equation are given by any boundary values that satisfy
g
0
ðtÞg
1
ðtÞg
0
ðtÞg
1
ðtÞ¼0
An example of boundary condition satisfying
this constraint, encompassing also Dirichlet and
Neumann homogeneous conditions, is q(0, t)
q
x
(0, t) = 0, with a non-negative constant.
As mentione d at the beginning of the previous
section, the approach described in general can be
used to obtain results similar to those given for the
NLS equation for many other integrable evolution
equations, in particular, mKdV (Boutet de Monvel
et al. 2004), sG, and KdV (Fokas 2002). The results
obtained are essentially the same as for NLS,
starting from the general form [5] of the Lax pair,
and include the derivation of the solution representa-
tion, the complete characterization of linearizable
boundary conditions, and the analysis of the Dirichlet
to Neumann map.
The approach above can also be used for studying
boundary-value problems posed on finite domains,
for x 2 [0, 1]. This has been done for a model for
transient simulated Raman scattering (Fokas and
Menyuk 1999), for the sG equation in light-cone
coordinates (Pelloni, in press), an d for the NLS
equation (Fokas and Its 2004). In this case also the
method yields a representation of the solution which
is suitable for asymptotic analysis. In this respect,
the question of soliton generation from boundary
data is of some importance, and has been recently
considered by various authors (Fokas and Menyuk
1999, Boutet de Monvel and Kotlyarov 2003,
Pelloni in press, Boutet de Monvel et al. 2004).
The results are however still considered case by case,
and there is no general framework for this problem
identified yet. For problem on the half-line, solitons
may be generated but not necessarily in correspon-
dence to the singularities that generate soliton for
the full line problem, even when the same singula-
rities are prese nt. For problems posed on finite
domains, in some specific cases at least for the
simulated Raman scattering, and the sG equations,
it appears that the dominant asymptotic behavior is
given by a similarity solution.
350 Boundary-Value Problems for Integrable Equations

In conclusion, the extension of the inverse scattering
transform given by Fokas provides the tool for analyzing
boundary-value problems specific to nonlinear integr-
able equations. This tool relies, in an essential way, on
the integrability structure of the problem, and yields a
full characterization of the solution as well as uniqueness
and existence results. The solution representation thus
obtained is not always fully explicit, but it is always
suitable for asymptotic analysis using standard techni-
ques such as the recent nonlinearization of the classical
steepest descent method.
See also:
@ Approach to Integrable Systems; Integrable
Discrete Systems; Integrable Systems and the Inverse
Scattering Method; Integrable Systems: Overview;
Nonlinear Schro
¨
dinger Equations; Riemann–Hilbert
Methods in Integrable Systems; Separation of Variables
for Differential Equations; Sine-Gordon Equation.
Further Reading
Ablowitz MJ and Segur HJ (1974) The inverse scattering
transform: semi-infinite interval. Journal of Mathematical
Physics 16: 1054.
Adler VE, Gurel B, Gurses M, and Habibullin IT (1997) Journal
of Physics A 30: 3505.
Bona J, Sun S, and Zhang BY (2001) A non-homogeneous boundary
value problem for the Korteweg–deVries equation. Transactions of
the American Mathematical Society 354: 427–490.
Boutet de Monvel A, Fokas AS, and Shepelsky D (2004) The
modified KdV equation on the half-line. Journal of the
Institute of Mathematics of Jussieu 3: 139–164.
Boutet de Monvel A and Kotlyarov VP (2003) Generation of
asymptotic solitons of the nonlinear Schro¨ dinger equation by
boundary data. Journal of Mathematical Physics 44: 3185–3215.
Colin T and Ghidaglia J-M (2001) An initial-boundary value problem
for the Korteweg–deVries equation posed on a finite interval.
Advanced Differential Equations 6(12): 1463–1492.
Colliander JE and Kenig CE (2001) The generalized Korteweg–
deVries equation on the half line (http://arxiv.org/abs/
math.AP/0111294).
Degasperis A, Manakov S, and Santini PM (2001) The nonlinear
Schro¨ dinger equation on the half line. JETP Letters
74(10): 481–485.
Fokas AS (2000) On the integrability of linear and nonlinear
PDEs. Journal of Mathematical Physics 41: 4188.
Fokas AS (2002) Integrable nonlinear evolution equations on the half
line. Communications in Mathematical Physics 230: 1–39.
Fokas AS (2005) A generalised Dirichlet to Neumann map for
certain nonlinear evolution PDEs. Communications on Pure
and Applied Mathematics 58: 639–670.
Fokas AS and Its AR (2004) The nonlinear Schro¨ dinger equation
on the interval. Journal of Physics A: Mathematical and
General 37: 6091–6114.
Fokas AS and Menyuk CR (1999) Integrability and self-similarity
in transient stimulated Raman scattering. Journal of Nonlinear
Science 9: 1–31.
Gardner GS, Greene JM, Kruskal MD, and Miura RM (1967)
Method for solving the Korteweg–de Vries equation. Physical
Review Letters 19: 1095.
Habibullin IT (1999) KdV equation on a half-line with the zero
boundary condition. Theoretical and Mathematical Fizika
119: 397.
Khruslov E and Kotlyarov VP (2003) Generation of asymptotic
solitons in an integrable model of stimulated Raman scattering by
periodic boundary data. Mat. Fiz. Anal. Geom. 10(3): 366–384.
Lax PD (1968) Integrals of nonlinear equations of evolution and
solitary waves. Communications in Pure and Applied Mathe-
matics 21: 467–490.
Pelloni B (2005) The asymptotic behaviour of the solution of boundary
value problems for the Sine–Gordon equation on a finite interval.
Journal of Nonlinear Mathematical Physics 12: 518–529.
Sklyanin EK (1987) Boundary conditions for integrable equations.
Functional Analysis and its Applications 21: 86–87.
Zakharov VE and Shabat AB (1972) An exact theory of two-
dimensional self-focusing and one-dimensional automodula-
tion of waves in a nonlinear medium. Soviet Physics – JEPT
34: 62–78.
Braided and Modular Tensor Categories
V Lyubashenko, Institute of Mathematics, Kyiv,
Ukraine
ª 2006 Elsevier Ltd. All rights reserved.
Introduction
Tensor or monoidal categories are encountered in
various branches of modern mathematical physics.
First examples came without mentioning the name of a
monoidal category as categories of modules over a
group or a Lie algebra. The operation of a monoidal
product in this case is the usual tensor product X
C
Y
of modules (representations) X and Y. These categories
are symmetric: the modules X Y and Y X are
isomorphic; moreover, the permutation isomorphism
(the twist) c : X Y 7!Y X, x y !y x,is
involutive, c
2
= id
XY
. Next examples of m onoidal
categories were given by categories of representa-
tions of supergroups or Lie superalgebras. They are
also symmet ric: now the symm etry (Koszul’s rule)
c : X Y !Y X, x y 7!(1)
deg xdeg y
y x,isthe
twist with a sign, which depends on the degree (or
parity) deg x of elements x 2 X.
The development of the theory of exactly solvable
models in statistical mechanics led Drinfeld (1987)
to the notion of qua ntum groups – Hopf algebras H
with additional structures (quasitriangular Hopf
algebras). H-Modules also form a monoidal cate-
gory; however, it is not symmetric, but only braided.
Braided and Modular Tensor Categories 351

It means that a canonical braiding isomorphism
c : X Y !Y X still exists, but it is not involutive
any more, c
2
6¼ id. The braiding c satisfies the Yang–
Baxter equation
ðc 1Þð1 cÞðc 1Þ
¼ð1 cÞðc 1Þð1 cÞ : X Y Z !Z Y X
for any three H-modules X, Y, Z.
In the above exam ples, we also have an obviou s
isomorphism of associativity a : X (Y Z)!
(X Y) Z of the it erated tensor product.
There are, however, monoidal categories of
modules, where such an isomorphism is nontri-
vial, namely, modules over quasi-Hopf algebras.
These were introduced by Drinfeld (1989a, b)in
connection with the Knizhnik–Zamolodchikov equ a-
tions. These nontrivial associativity isomorphisms
a : X (Y Z) !(X Y) Z are required to
satisfy the pentagon equation of Mac Lane and
Stasheff.
Braided monoidal categories also arise in rational
conformal field theories (RCFTs), integrable models
of statistical mechanics and topological quantum
field theories (TQFTs). The common feature of
these categories is that they are semisimple abelian
with finite number of simple modules. In other
words, such a category C is equivalent to the category
of finite-dimensional C
n
= C C-modules for
some n. However, not monoidally equivalent, the
monoidal structure can be rather involved. For
instance, from the Ising model one can obtain the
monoidal category with two simple objects I and X,
which obey the monoidal law 1 1 = 1, 1 X = X
1 = X, X X = 1 X. Clearly, such relations cannot
be satisfied by finite-dimensional C-vector spaces 1
and X,if would mean the usual tensor product
C
of C-vector spaces. However, here means simply a
functor : CC!C with certain properties. Cate-
gories which come from RCFT, integrable models or
TQFT often enjoy additional properties. They are
rigid – for each object X, there exists a dual object
X
_
.Theyareribbon (balanced) – there is a canonical
endomorphism v
X
: X !X for each object X, which
is related to the braiding. They are modular,whichis
defined as nondegeneracy of a certain matrix. The
meaning of modularity is that the ribbon category is
suitable for producing a TQFT out of it.
For categories equivalent to the category of
C C-modules, the ribbon (braided) monoidal
structure can be specified by a finite number of complex
matrices. For instance, 6j-symbols or q-6j-s ymbols
encode the associativity isomorphism. In this form,
modular categories appeared in the work of Moore and
Seiberg (1989) on RCFTs. Such categories can be
realized as categories of modules over weak Hopf
algebras, but we stress again that the monoidal product
for such modules does not coincide with the tensor
product of vector spaces. So, general features are better
seen at the level of category theory, and we now start
with precise definitions.
Rigid Monoidal Categories
We recall here the basic definitions of monoidal
categories, monoidal funct ors, and dual objects.
Definition 1 A monoidal category (C, , a, 1, l, r)is
a category C, a functor : CC!C (called the
tensor product), a functorial isomorphism a : X
(Y Z) !(X Y) Z, the associativity isomorph-
ism, a unit object 1, and two functorial isomorph-
isms l : 1 X !X, r : X 1 !X such that
X ðY ðZ WÞÞ!
a
ðX YÞðZ WÞ!
a
ððX YÞZÞW
X a #"a W
X ððY ZÞWÞ
^
a
ðX ðY ZÞÞ W
commutes (the pentagon equation) and
a
X;1;Y
¼ X ð1 YÞ!
Xl
Y
X Y !
r
1
X
Y
ðX 1ÞY
Definition 2 A monoidal functor (F, , f ):(C, ) !
(D, ) is a functor F : C!D, a functorial isomorph-
ism =
X, Y
: F(X) F(Y) !F(X Y) 2D, and an
isomorphism f : 1 !F1 2Dsuch that
FX ðFY FZÞ!
1
FX FðY ZÞ!
FðX ðY ZÞÞ
a
##
F
a
ðFX FYÞFZ !
1
FðX YÞZ !
FððX YÞZÞ
F1 FX!
Fð1 XÞ FX F1 !
FðX 1Þ
f 1
"#
F
l
; 1 f
"#
Fr
1 FX
^
l
FX FX 1
^
r
FX
commute. A morphism of monoidal functors
:(F,,f )!(G, ,g) is a functorial morphism
:F!G such that
FX FY
!
FðX YÞ
##
GX GY !
GðX YÞ
g ¼ð1 !
f
F1 !
G1Þ
The f da tum of a monoidal functor (F, , f )is
uniquely determined by the (F, ) data, so we can
denote a monoidal functor as (F, ) or even F.
352 Braided and Modular Tensor Categories
The coherence theorem of Mac Lane (1963) states
that any monoidal category C is equivalent to a
strictly monoidal category, in which X (Y Z) =
(X Y) Z, 1 X = X = X 1, and the isomorph-
isms a, l, r are identity isomorphisms. Thus, in
theoretical constructions, one may ignore the associa-
tivity isomorphism. It is not always so in practice. For
instance, working with quasi-Hopf algebras related
with the Knizhnik–Zamolodchikov equation one
prefers to keep the original category, which is (a
deformation of) the category of modules over a Lie
algebra, rather than to replace it with a strict monoidal
category, that is not a category of modules any more.
Definition 3 A rigid category C is a monoidal
category in which, to every object X 2C, dual
objects X
_
and
_
X 2C are assigned together with
morphisms of evaluation and coevaluation
ev
X
: X X
_
! 1 ¼ X
[
X
_
ev
0
X
:
_
X X ! 1 ¼
_
X
[
X
coev
X
: 1 ! X
_
X ¼ X
_
\
X
coev
0
X
: 1 ! X
_
X ¼ X
\
_
X
The evaluations and coevaluations are chosen such
that the compositions
X!
r
1
X1 !
1coev
XðX
_
XÞ!
a
ðXX
_
ÞX!
ev1
1X!
1
X
X!
1
1
1X !
coev
0
1
ðX
_
XÞX!
a
1
Xð
_
XXÞ!
1ev
0
X1!
r
X
X
_
!
1
1
1X
_
!
coev1
ðX
_
XÞX
_
!
a
1
X
_
ðXX
_
Þ!
1ev
X
_
1!
r
X
_
_
X!
r
1
_
X1 !
1coev
0
_
XðX
_
XÞ!
a
ð
_
XXÞ
_
X !
ev
0
1
1
_
X!
1
_
X
are all identity morphisms.
In a rigid monoidal category C, there is a pairing
ðX YÞðY
_
X
_
Þ!
ðX ðY Y
_
ÞÞ
X
_
^
XevX
_
ðX 1ÞX
_
^
rX
_
X X
_
!
ev
1
which induces an isomorphism j
þX, Y
: Y
_
X
_
!(X
Y)
_
, such that the above pairing coincides with
ðX YÞðY
_
X
_
Þ!
1j
þ
ðX YÞðX YÞ
_
!
ev
1
The equation
coev
XY
¼
1 !
coev
Y
Y
_
Y ’ Y
_
1 Y
^
1coev
X
1
Y
_
X
_
X Y
!
j
þ
1
ðX YÞ
_
ðX YÞ
also holds. Similarl y, there is an isomorphism
j
X, Y
:
_
Y
_
X !
_
(X Y).
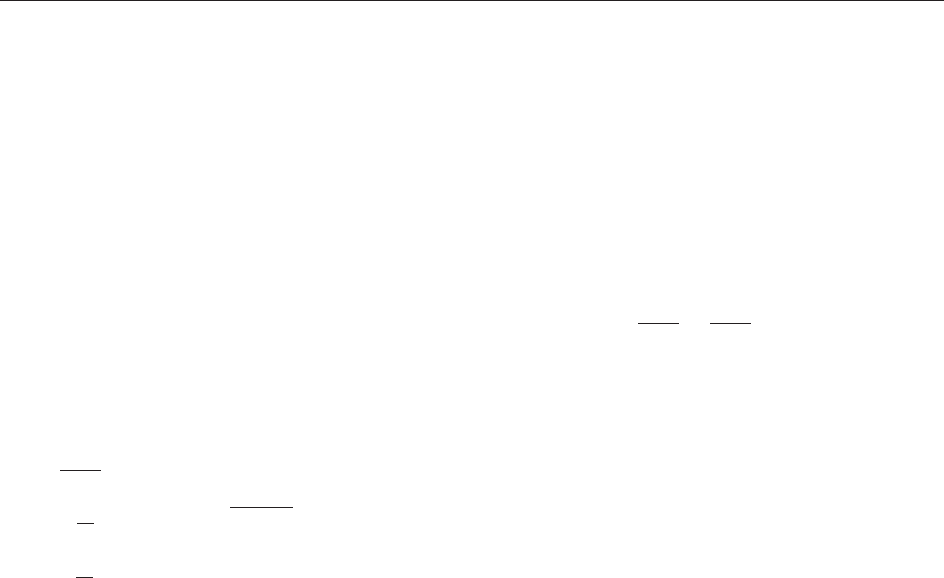
Morphisms constructed from braidings and (co)-
evaluations are often described by tangles. The
conventions are listed in Figure 1. The suggested
assignment of morphisms in C to elementary pictures
extends to a unique functor from the category of
C-colored tangles to the category C itself. With the
above interpretation, these tangles need not be
oriented. We shall use the same notation for framed
tangles, and the framing will be within the plane.
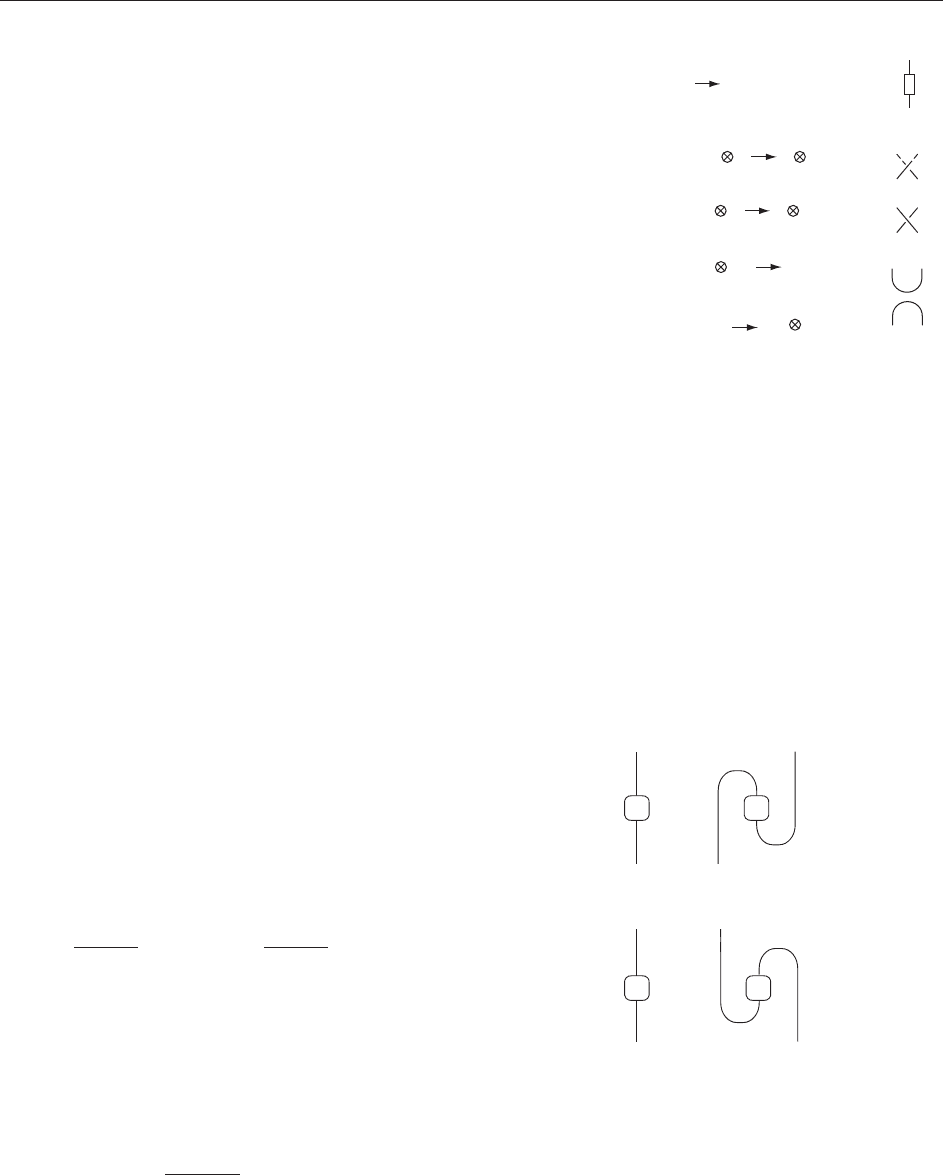
The maps Ob C!Ob C, X 7!X
_
,andX 7!
_
X
extend to contravariant self-equivalences C!C,
f 7!f
t
, and f 7!
t
f . For given f, the morphisms f
t
and
t
f can be defined, respectively, by the following
pictures using the assignment from Figure 1:
Y
∨
X
∨
Y
X
∨
Y
∨
X
Y
∨
X
∨
∨
Y
Y
∨
X
X
=
=
t
f
f
f
t
f
We have a monoidal self-equivalence of C,
ð
__
;j
2
Þ: ðC;; 1Þ!ðC; ;1Þ; X7!X
__
; f 7!f
tt
j
2X;Y
¼ X
__
Y
__
!
jþ
ðY
_
X
_
Þ
_
!
j
1t
þ
ðX YÞ
__
½1
It is not always true that the two duals X
_
and
_
X
are isomorphic. However, there are canonical
isomorphisms
X !
_
ðX
_
Þ; X !ð
_
XÞ
_
A morphism
f :
X Y by
c
X,Y
:
X Y Y X
The braiding
by
c
–1
:
X Y Y X
The inverse braiding
by
:
ev
X
X X
∨
1
The evaluation
by
f
Y
X
XY
X
Y
X
X
∨
X
∨
X
:
coev
X
X
∨
X
The coevaluation
1
by
Figure 1 Conventions for notation of morphisms from
tangles.
Braided and Modular Tensor Categories 353
We may replace the category C with an equivalent one,
such that the above isomorphisms become identity
morphisms, and the functors
_
and
_
are inverse to
each other. We shall assume this to simplify notations.
Finally, we denote the iterated duals by X
(n_)
= X
__
(n times) and X
(n_)
=
__
X (n times) for n 0.
Braided Categories
Here we review the definitions of the braiding
isomorphism and further derived isomorphisms. Sev-
eral basic relations between them are listed. Two
important classes of examples of braided categories
are given by the categories of modules over quasitrian-
gular Hopf algebras and the categories of tangles.
Definition 4 A braided category (C, c) is a monoidal
category C equipped with a functorial isomorphism
c = c
X, Y
: X Y !Y X – the braiding, or the
commutativity isomorphism – such that the two
hexagons commute,
X ðY ZÞ
^
1c
1
X ðZ YÞ!
a
ðX ZÞY
a ##c
1
1
ðX YÞZ !
c
1
Z ðX YÞ!
a
ðZ XÞY
(one for c and one for c
1
).
The graphical notation for the braiding and its
inverse is
c ¼ðc
X;Y
: X Y ! Y X Þ¼
X
Y
Y
X
c ¼
X
Y
Y
X
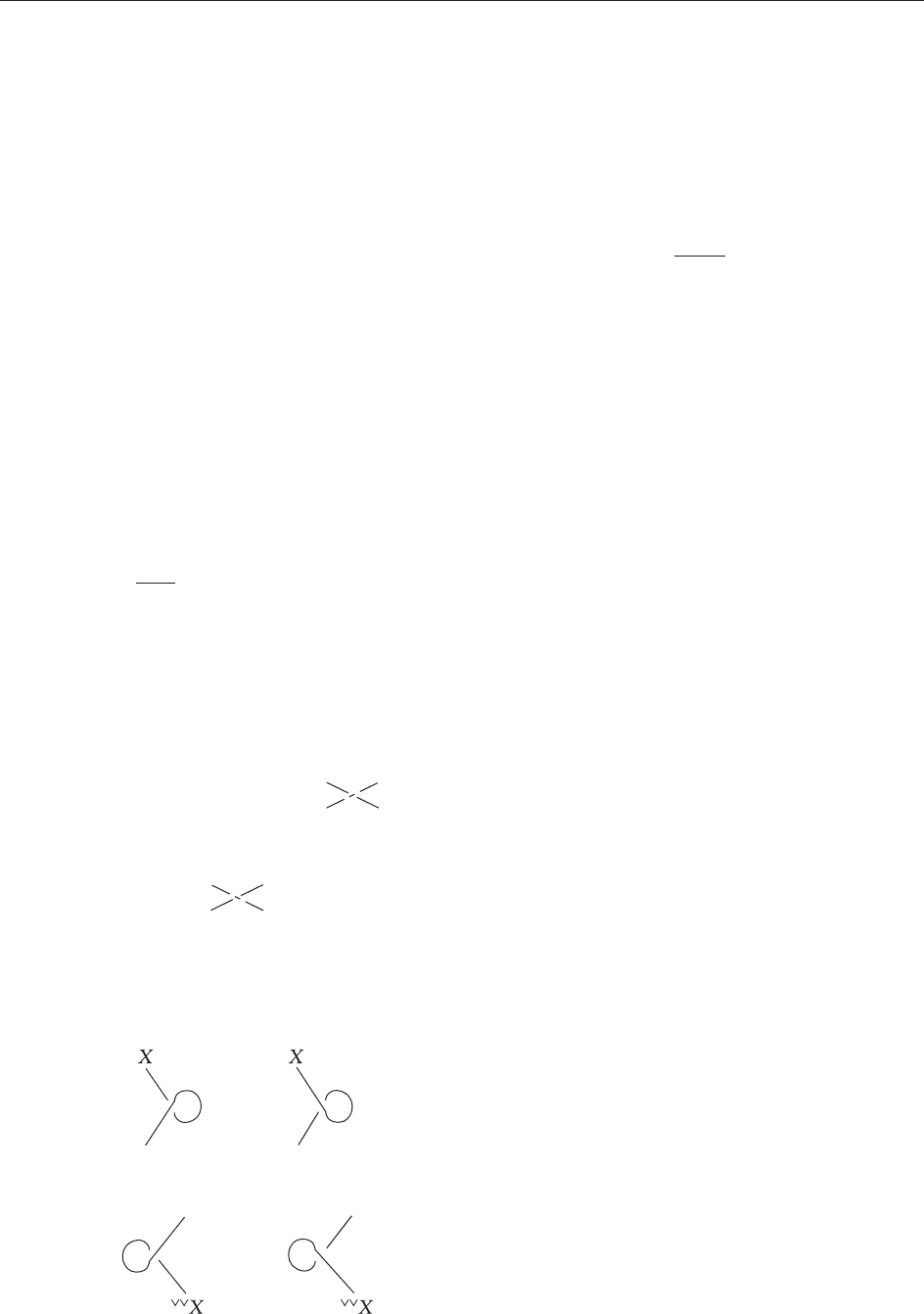
In a rigid braided category, we can define
functorial isomorphisms using again the conventions
from Figure 1:
X
∨∨
u
2
1
=
,
,
X
∨∨
u
2
–1
=
X
u
–2
–1
=
X
u
–2
–1
=
These are isomorphisms of monoidal functors
(see [1])
u
2
1
: ðId; c
2
Þ!ð
__
; j
2
Þ
u
2
1
: ðId; c
2
Þ!ð
__
; j
2
Þ
In particular, this implies the commutativity of the
diagram
X Y
^
c
2
X Y
u
2
1
u
2
1
##u
2
1
X
__
Y
__
!
j
2
ðX YÞ
__
The square of the monoidal functor (
__
, j
2
)is
ð
____
; j
4
Þ : ðC; ; 1Þ!ðC; ; 1Þ;
X 7!X
____
; f 7!f
tttt
where
j
4X;Y
¼ X
____
Y
____
!
j
2
ðX
__
Y
__
Þ
__
!
j
tt
2
ðX YÞ
____
The natural isomorphism u
4
0
= u
2
1
u
2
1
is, in fact, an
isomorphism of monoidal functors u
4
0
: (Id, id) !
(
____
, j
4
).
Ribbon Categories
Now we define balancing and recall some properties
of balanced (ribbon) categories.
Definition 5 Let C be a rigid braided category.
Abalancing
X
: X !X
__
is an isomorphism of
monoidal functors : (Id, id, id) !(
__
, j
2
, d
2
)such
that
2
= u
4
0
and
t
X
=
1
X
_
: X
___
!X
_
.Thecate-
gory C equipped with a balancing is called
balanced.
We also use the notation u
2
0
= . In any balanced
category, there exists a canonical ribbon twist v.
A ribbon twist v = v
X
: X !X, v :Id!Id is a self-
adjoint (v
X
_
= v
t
X
) automorphism of the identity
functor such that c
2
= (v
1
X
v
1
Y
) v
XY
. It can be
determined from the equations
u
2
0
¼ u
2
1
v
1
¼ u
2
1
v : X ! X
__
1
¼ u
2
0
¼ u
2
1
v
1
¼u
2
1
v : X !
__
X
In particular, its square is given by the canonical
isomorphism v
2
= u
2
1
u
2
1
. Conversely, in any
rigid braided category with a ribbon twist (called
ribbon category) there exists a canonical balan-
cing u
2
0
given b y the above for mulas. Thus, ribbon
categories and balanced categories are synonyms.
In the case of X = 1,wehavev
1
= id
1
.
354 Braided and Modular Tensor Categories