Francoise J.-P., Naber G.L., Tsun T.S. (editors) Encyclopedia of Mathematical Physics
Подождите немного. Документ загружается.


This is a system describing a motion of a ‘‘pendu-
lum’’ ((p, q) coordinates) interacting with a ‘‘rotat-
ing wheel’’ ((A
1
,
1
) coordinates) and a ‘‘clock’’
((A
2
,
2
) coordinates) a priori unstable near the
points p = 0, q = 0, 2 (s
1
= 1, s
2
= 0,
1
=
ffiffiffi
g
p
,
cf. [86]). It can be proved that on the energy surface
of energy E and for each " 6¼ 0 small enough (no
matter how small) there are initial data with action
coordinates close to A
i
= (A
i
1
, A
i
2
) with (1=2)A
i2
1
þ A
i
2
close to E eventually evolving to a datum
A
0
= (A
0
1
, A
0
2
) with A
0
1
at a distance from A
f
1
smaller
than an arbitrarily prefixed distance (of course with
energy E). Furthermore, during the whole process
the pendulum energy stays close to zero within o(")
(i.e., the pendulum swings following closely the
unperturbed separatrices).
In other words, [90] describes a machine (the
pendulum) which, working approximately in a
cycle, extracts energy from a reservoir (the clock)
to transfer it to a mechanical device (the wheel). The
statement that diffusion is possible means that the
machine can work as soon as " 6¼ 0, if the initial
actions and the initial phases (i.e.,
1
,
2
, p, q) are
suitably tuned (as functions of ").
The peculiarity of the system [90] is that the fixed
points P
of the unperturbed pendulum (i.e., the
equilibria p = 0, q = 0, 2) remain unstable equilibria
even when " 6¼ 0 and this is an important simplify-
ing feature.
It is a peculiarity that permits bypassing the
obstacle, arising in the analysis of more general
cases, represented by the resonance surfaces consist-
ing of the A’s with A
1
1
þ
2
= 0: the latter
correspond to harmonics (
1
,
2
) present in the
perturbing function, i.e., the harmonics whi ch
would lead to division by zero in an attempt to
construct (as necessary in studying [90] by Arnol’d’s
method) the parametric equations of the perturbed
invariant tori with action close to such A’s. In the
case of [90] the problem arises only on the
resonance marked in Figure 6 by a heavy line, i.e.,
A
1
= 0, corre sponding to cos
1
in [90].
If " = 0, the points P
with p = 0, q = 0 and the
point P
þ
with p = 0, q = 2 are both unstable
equilibria (and they are, of course, the same point,
if q is an angular variable). The unstable manifold
(it is a curve) of P
þ
coincides with the stable
manifold of P
and vice versa. So that the
unperturbed system admits nontrivial motions lead-
ing from P
þ
to P
and from P
to P
þ
, both in a bi-
infinite time interval (1, 1): the p, q variables
describe a pendulum and P
are its unstable
equilibria which are connected by the separatrices
(which constitute the zero-energy surfaces for the
pendulum).
The latter property remains true for more general
a priori unstable Hamiltonians
H
"
¼H
0
ðAÞþH
u
ðp; qÞþ"f ðA; a; p; qÞ
in ðU T
‘
ÞðR
2
Þ
½91
where H
u
is a one-dimensional Hamiltonian which
has two unstable equilibrium points P
þ
and P
linearly repulsive in one direction and linearly
attractive in another which are connected by two
heteroclinic trajectories which, as time tends to 1,
approach P
and P
þ
and vice versa.
Actually, the points need not be different but, if
coinciding, the trajectories linking them must be
nontrivial: in the case [90] the variable q can be
considered an angle and then P
þ
and P
would
coincide (but are connected by nontrivial trajec-
tories, i.e., by trajectories that also visit points
different from P
). Such trajectories are called
heteroclinic if P
þ
6¼ P
and homoclinic if P
þ
= P
.
In the general case, besides the homoclinicity (or
heteroclinicity) condition, certain weak genericity
conditions, automatically satisfied in the example
[90], have to be imposed in order to show that,
given A
i
and A
f
with the same unperturbed energy
E, one can find, for all " small enough but not equal
to zero, initial data ("-dependent) with actions
arbitrarily close to A
i
which evolve to data with
actions arbitrarily close to A
f
. This is a phenomenon
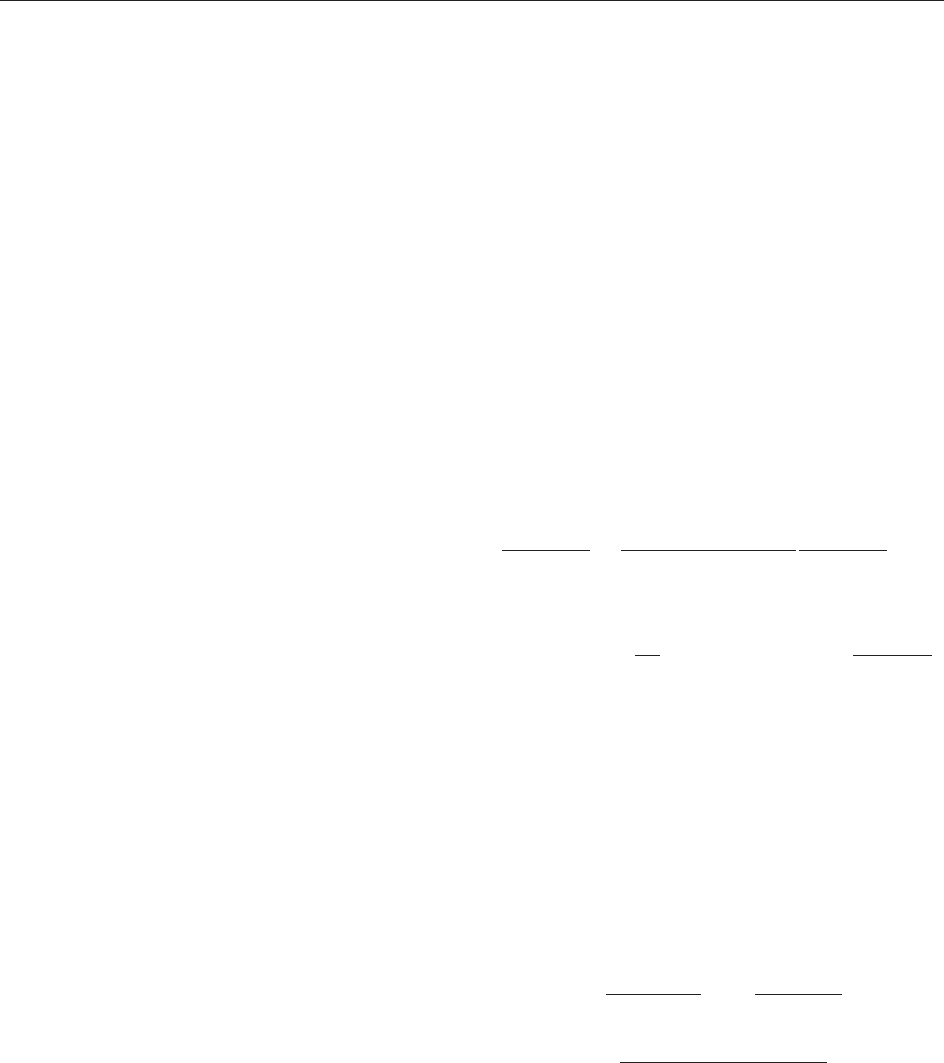
A
f
A
i
(a)
A
f
A
i
(b)
Figure 6 (a) The " = 0 geometry: the ‘‘partial energy’’ lines are
parabolas, (1=2)A
2
1
þ A
2
= const: The vertical lines are the
resonances A
1
= rational (i.e.,
1
A
1
þ
2
= 0). The disks are
neighborhoods of the points A
i
and A
f
(the dots at their centers).
(b) " 6¼ 0; an artist’s rendering of a trajectory in A space, driven
by the pendulum swings to accelerate the wheel from A
i
1
to A
f
1
at
the expenses of the clock energy, sneaking through invariant tori
not represented and (approximately) located ‘‘away’’ from the
intersections between resonances and partial energy lines (a
dense set, however). The pendulum coordinates are not shown:
its energy stays close to zero, within a power of ". Hence the
pendulum swings, staying close to the separatrix. The oscilla-
tions symbolize the wiggly behavior of the partial energy
(1=2)A
2
1
þ A
2
in the process of sneaking between invariant tori
which, because of their invariance, would be impossible without
the pendulum. The energy (1=2)A
2
1
of the wheel increases
slightly at each pendulum swing: accurate estimates yield an
increase of the wheel speed A
1
of the order of "=( log "
1
)at
each swing of the pendulum implying a transition time of the
order of g
1=2
"
1
log "
1
.
Introductory Article: Classical Mechanics 25
called the Arnol’d diffusion. Simple sufficient con-
ditions for a transition from near A
i
to near A
f
are
expressed by the following result:
Theorem 7 Given the Hamiltonian [91] with H
u
admitting two hyperbolic fixed points P
with
heteroclinic connections, t !(p
a
(t), q
a
(t)), a = 1, 2,
suppose that:
(i) On the unperturbed energy surface of energy
E = H(A
i
) þH
u
(P
) there is a regular curve
: s !A(s) joining A
i
to A
f
such that the
unperturbed tori {A(s)} T
‘
can be continued
at " 6¼ 0 into invariant tori T
A(s), "
for a set of
values of s which fills the curve leaving only
gaps of size of order o(").
(ii) The ‘ ‘ matrix D
ij
of the second derivatives of
the integral of f over the heteroclinic motions is
not degenerate, that is,
jdet Dj
¼
det
Z
1
1
dt @
i
j
f ðA; a þ wðAÞt;
p
a
ðtÞ; q
a
ðtÞÞ
> c > 0 ½92
for all A’s on the curve and all a 2 T
2
.
Given arbitrary >0, for " 6¼ 0 small enough
there are initial data with action and energy closer
than to A
i
and E, respectively, which after a long
enough time acquire an action closer than to A
f
(keeping the initial energy).
The above two conditions can be shown to hold
generically for many pairs A
i
6¼ A
f
(and many
choices of the curves connecting them) if the
number of degrees of freedom is 3. Thus, the result,
obtained by a simple extension of the argument
originally outlined by Arnol’d to discuss the para-
digmatic example [90], proves the existence of
diffusion in a priori unstable systems. The integral
in [92] is called Melnikov integral.
The real difficulty is to estimate the time needed
for the transition: it is a time that obv iously has to
diverge as " !0. Assuming g fixed (i.e., " indepen-
dent) a na ive approach easily leads to estimates
which can even be worse than O(exp (a"
b
)) with
some a, b > 0. It has finally been shown that in such
cases the minimum time can be, for rather general
perturbations "f (a, q), estimated above by
O("
1
log "
1
), which is the best that can be hoped
for under generic assumptions.
The reader is referred to Arnol’d (1989) and
Chierchi a and V aldinoci (2000) for more details.
Long-Time Stability of Quasiperiodic
Motions
A more difficult problem is whether the same
phenomenon of migration in action space occurs in
a priori stable systems. The root of the difficulty is a
remarkable stability property of quasiperiodic
motions. Consider Hamiltonians H
"
(A, a) = h(A) þ
"f (A, a) with H
0
(A) = h(A) strictly convex, analytic,
and anisochronous on the closure U of an open
bounded region U R
‘
, and a perturbation "f (A, a)
analytic in
U T
‘
.
Then a priori bounds are available on how long it
can possibly take to migrate from an action close to
A
1
to one close to A
2
: and the bound is of
‘‘exponential type’’ as " !0 (i.e., it admits a lower
bound which behaves as the exponential of an
inverse power of "). The simplest theorem is
(N
EKHOROSSEV):
Theorem 7 There are constants 0 < a, b, d, g,
such that any initial datum (A, a) evolves so that A
will not change by more than a"
g
before a long time
bounded below by exp (b"
d
).
Thus, this puts an exponential bound, i.e., a
bound exponential in an inver se power of ", to the
diffusion time: before a time exp (b"
d
) actions can
only change by O("
g
) so that their variation cannot
be large no matter how small " 6¼ 0 is chosen. This
places a (long) lower bound to the time of diffusion
in a priori stable systems.
The proof of the theore m provides, actually, an
interesting and detailed picture of the variations in
actions showing that some actions may vary more
slowly than others.
The theorem is constructive, i.e., all constants
0 < a, b, d, can be explicitly chosen and depend
on ‘, H
0
, f although some of them can be fixed to
depend only on ‘ and on the minimum curvature of
the convex graph of H
0
. Its proof can be adapted
to cover many cases which do not fall in the class of
systems with strictly convex unperturbed Hamilto-
nian, and even to cases with a resonant unperturbed
Hamiltonian.
However, in important problems (e.g., in the
three-body problems met in celestial mechanics)
there is empirical evidence that diffusion takes
place at a fast pace (i.e., not exponentially slow in
the above sense) while the above results would
forbid a rapid migration in phase space if they
applied: however, in such problems the assumptions
of the theorem are not satisfied, because the
unperturbed system is strong ly resonant (as in the
celestial mechanics problems, where the number of
independent frequencies is a fraction of the number
26 Introductory Article: Classical Mechanics
of degrees of freedom and h(A) is far from strictly
convex), leaving wide open the possibility of observ-
ing rapid diffusion.
Further, changing the assumptions can dramati-
cally change the results. For instance, rapid diffusion
can sometimes be proved even though it might be
feared that it should require exponentially long
times: an example that has been proposed is the
case of a three-timescales system, with Hamiltonian
!
1
A
1
þ !
2
A
2
þ
p
2
2
þ gð1 þ cos qÞ
þ "f ð
1
;
2
; p; qÞ½93
with w
"
=
def
(!
1
, !
2
), where !
1
= "
1=2
!, !
2
= "
1=2
e
!
and
!,
e
!>0 constants. The three scales are
!
1
1
,
ffiffiffiffiffiffiffi
g
1
p
, !
1
2
. In this case, there are many
(although by no means all) pairs A
1
, A
2
which can
be connected within a time that can be estimated to
be of order O("
1
log "
1
).
This is a rapid-diffusion case in an a priori
unstable system in which condition [92] is not
satisfied: because the "-dependence of w(A) implies
that the lower bound c in [92] must depend on "
(and be exponentially small with an inverse power
of " as " !0).
The unperturbed system in [93] is nonresonant in
the H
0
part for ">0 outside a set of zero measure
(i.e., where the vector w
"
satisfies a suitable
Diophantine property) and, furthermore, it is
a priori unstable: cases met in applicat ions can be
a priori stable and resonant (and often not aniso-
chronous) in the H
0
part. In such a system, not only
the speed of diffusion is not understood but
proposals to prove its existence, if present (as
expected), have so far not given really satisfactory
results.
For more details, the reader in referred
to Nekhorossev (1977).
The Three-Body Problem
Mechanics and the three-body problem can be
almost identified with each other, in the sense that
the motion of three gravitating masses has long been
a key astronomical problem and at the same time
the source of inspiration for many techniques:
foremost among them the theory of perturbations.
As an introduction, consider a special case. Let
three masses m
S
= m
0
, m
J
= m
1
, m
M
= m
2
interact
via gravity, that is, with interaction potential
km
i
m
j
jx
i
x
j
j
1
: the simplest problem arises
when the third body has a neg legible mass compared
to the two others and the latter are supposed to be
on a circular orbit; furthermore, the mass m
J
is "m
S
with " smal l and the mass m
M
moves in the plane of
the circular orbit. This will be called the ‘‘circular
restricted three-body problem.’’
In a refe rence system with center S and rotating at
the angular speed of J around S inertial forces
(centrifugal and Coriolis) act. Supposing that the
body J is located on the axis with unit vector i at
distance R from the origin S, the acceleration of the
point M is
€
R ¼ F þ!
2
0
R
"R
1 þ "
i
2w
0
^
_
R
if F is the force of attraction and w
0
^
_
R !
0
_
R
?
where w
0
is a vector with jw
0
j= !
0
and perpen-
dicular to the orbital plane and R
?
=
def
(
2
,
1
)if
R = (
1
,
2
). Here, taking into account that the origin
S rotates around the fixed center of mass, !
2
0
(R
"R=(1 þ ")i) is the centrifugal force while 2w
0
^
_
R
is the Coriolis force. The equations of motion can
therefore be derived from a Lagrangian
L¼
1
2
_
R
2
W þ !
0
R
?
_
R þ
1
2
!
2
0
R
2
!
2
0
"R
1 þ "
R i ½94
with
!
2
0
R
3
¼ km
S
ð1 þ "Þ¼
def
g
0
W ¼
km
S
jRj
km
S
"
jR Rij
where k is the gravitational constant, R the distance
between S and J, and finally the last three terms in [94]
come from the Coriolis force (the first) and from the
centripetal force (the other two, taking into account that
the origin S rotates around the fixed center of mass).
Setting g = g
0
=(1 þ ") km
S
, the Hamiltonian of
the system is
H¼
1
2
ðp !
0
R
?
Þ
2
g
jRj
1
2
!
2
0
R
2
"
g
R
R
R
i
1
R
R
i
½95
The first part can be expressed immediately in the
action–angle coordinates for the two-body problem
(cf. the section ‘‘Newtonian potential and Kepler’s
laws’’). Calling such coordinates (L
0
,
0
, G
0
,
0
)and
0
the polar angle of M with respect to the major axis
of the ellipse and
0
the mean anomaly of M on its
ellipse, the Hamiltonian becomes, taking into account
that for " = 0 the ellipse axis rotates at speed !
0
,
H¼
g
2
2L
2
0
!
0
G
0
"
g
R
R
R
i
1
R
R
i
½96
Introductory Article: Classical Mechanics 27
which is convenient if we study the interior problem,
i.e., jRj < R. This can be expressed in the action–
angle coordinates via [41], [42]:
0
¼
0
þf
0
;
0
þ
0
¼
0
þ
0
þf
0
e ¼ 1
G
2
0
L
2
0
1=2
;
jRj
R
¼
G
2
0
gR
1
1þecosð
0
þf
0
Þ
½97
where (see [42]), f
=f (esin, ecos) and
f ðx; yÞ¼2x 1 þ
5
4
y þ
with the ellipsis denoting higher orders in x, y even
in x. The Hamiltonian takes the form, if !
2
= gR
3
,
H
"
¼
g
2
2L
2
0
!G
0
þ"
g
R
FðG
0
;L
0
;
0
;
0
þ
0
Þ½98
where the only important feature (for our purposes) is
that F(L,G,,) is an analytic function of L,G,,
near a datum with jGj< L (i.e., e > 0) and jRj< R.
However, the domai n of analyticity in G is rather
small as it is constrained by jGj< L excluding in
particular the circular orbit case G = L.
Note that apparently the KAM theore m fails to be
applicable to [98] because the matrix of the second
derivatives of H
0
(L, G) has vanishing determinant.
Nevertheless, the proof of the theorem also goes
through in this case, with minor changes. This can
be checked by studying the proof or, following a
remark by Poincare´, by simply noting that the
‘‘squared’’ Hamiltonian H
0
"
=
def
(H
"
)
2
has the form
H
0
"
¼
g
2
2L
2
0
!G
0
2
þ"F
0
ðG
0
;L
0
;
0
;
0
þ
0
Þ½99
with F
0
still analytic. But this time
det
@
2
H
0
0
@ðG
0
; L
0
Þ
¼6g
2
L
4
0
!
2
0
h 6¼ 0
if h ¼g
2
L
2
0
2!G
0
6¼ 0
Therefore, the KAM theorem applies to H
0
"
and
the key observation is that the orbits generated by
the Hamiltonian (H
"
)
2
are geometrically the same as
those generated by the Hamiltonian H
"
: they are
only run at a different speed becau se of the need of a
time rescaling by the constant factor 2H
"
.
This shows that, given an unperturbed ellipse of
parameters (L
0
, G
0
) such that w = (g
2
=L
3
0
, !),
G
0
> 0, with !
1
=!
2
Diophantine, then the perturbed
system admits a motion which is quasiperiodic with
spectrum proportional to w and takes place on an orbit
which wraps around a torus remaining forever close to
the unperturbed torus (which can be visualized as
described by a point moving, according to the area law
on an ellipse rotating at a rate !
0
)withactions
(L
0
, G
0
), provided " is small enough. Hence,
The KAM theorem answers, at least conceptually, the
classical question: can a solution of the three-body
problem remain close to an unperturbed one forever?
That is, is it possible that a solar system is stable
forever?
Assuming e, j%j=R 1 and retaining only the lowest
orders in e and j%j=R 1 the Hamiltonian [98]
simplifies into
H¼
g
2
2L
2
0
!G
0
þ
"
ðG
0
Þ
"g
2R
G
4
0
g
2
R
2
3cos2ð
0
þ
0
Þ
e cos
0
9
2
e cosð
0
þ2
0
Þ
þ
3
2
ecosð3
0
þ2
0
Þ
½100
where
"
ðG
0
Þ ¼ ðð1 þ "Þ
1=2
1Þ!G
0
"g
2R
G
4
0
g
2
R
2
e ¼ 1
G
2
0
L
2
0
1=2
It is an interesting exercise to estimate, assuming
as model the Hamiltonian [100] and following the
proof of the KAM theorem, how small has " to be if
a planet with the data of Mercury can be stable
forever on a (slowly precessing) orbit with actions
close to the present-day values under the influence
of a mass " times the solar mass orbiting on a circle,
at a distance from the Sun equal to that of Jupiter. It
is possible to follow either the above reduction to
the ordinary KAM theorem or to apply directly to
[100] the Lindstedt series expansion, proceeding
along the lines of the section ‘‘Quasip eriodicity and
KAM stability .’’ The first ap proach is easy but the
second is more efficient: in both cases, unless the
estimates are done in a particularly careful manner,
the value found for "m
S
is not interesting from the
viewpoint of astronomy.
The reader is refered to Arnol’d (1989) for more
details.
Rationalization and Regularization of
Singularities
Often integrable systems have interesting data which
lie on the boundary of the integrability domain. For
instance, the central motion when L = G (circular
orbits) or the rigid body in a rotation around one of
the principal axes or the two-body problem when
G = 0 (collisional data). In such cases, perturbation
28 Introductory Article: Classical Mechanics
theory cannot be applied as disc ussed abov e.
Typically, the perturbation depends on quantities
like
ffiffiffiffiffiffiffiffiffiffiffiffiffiffi
L G
p
and is not analytic at L = G. Never-
theless, it is sometimes possible to enlarge phase space
and introduce new coordinates in the vicinity of the
data which in the initial phase space are singular.
A notable example is the failure of the analys is of
the circular restricted three-body problem: it appar-
ently fails when the orbit that we want to perturb is
circular.
It is convenient to introduce the canonical
coordinates L, and G, :
L ¼ L
0
; G ¼ L
0
G
0
¼
0
þ
0
;¼
0
½101
so that e =
ffiffiffiffiffiffiffiffiffiffiffiffiffiffi
2GL
1
p
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
1 G(2L)
1
q
and
0
= þ
and
0
=
0
þ f
0
, where f
0
is defined in [42] (see
also [97]). Hence,
0
¼ þ þ f
þ
;
0
þ
0
¼ þ f
þ
e ¼
ffiffiffiffiffiffiffi
2G
p
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
1
L
1
G
2L
s
j%j
R
¼
L
2
ð1 e
2
Þ
gR
1
1 þ e cosð þ þ f
þ
Þ
½102
and the Hamiltonian [100] takes the form
H
"
¼
g
2
2L
2
!L þ !G
þ "
g
R
FðL G; L;þ ; Þ½103
In the coordinates L,G of [101] the unperturbed
circular case corresponds to G = 0 and [96], once
expressed in the action–angle variables G, L, , ,is
analytic in a domain whose size is controlled by
ffiffiffiffiffi
G
p
. Nevertheless, very often problems of perturba-
tion theory can be ‘‘regularized.’’
This is done by ‘‘enlarging the integrability’’
domain by adding to it points (one or more) around
the singularity (a boundary point of the domain of
the coordinates) and introducing new coordinates to
describe simultaneously the data close to the
singularity and the newly added points: in many
interesting cases, the equations of motion are no
longer singular (i.e., become analytic) in the new
coordinates and are therefore apt to describe the
motions that reach the singularity in a finite time.
One can say that the singularity was only apparent.
Perhaps this is best illustrated precisely in the
above circular restricted three-body problem, with
the singularity occurring where G = 0, that is, at a
circular unperturbed orbit. If we describe the points
with G small in a new system of coordinates
obtained from the one in [101] by letting alone
L, and setting
p ¼
ffiffiffiffiffiffiffi
2G
p
cos ; q ¼
ffiffiffiffiffiffiffi
2G
p
sin ½104
then p, q vary in a neighborhood of the origin with
the origin itself excluded.
Adding the origin of the p–q plane then in a full
neighborhood of the origin, the Hamiltonian [96] is
analytic in L, ,
p, q. This is because it is analytic
(cf. [96], [97]) as a function of L, and e cos
0
and of cos (
0
þ
0
). Since
0
= þ þ f
þ
and
0
þ
0
= þ f
þ
by [97], the Hamiltonian [96] is
analytic in L, , e cos ( þ þ f
þ
), cos ( þ f
þ
)
for e small (i.e., for G small) and, by [42], f
þ
is
analytic in e sin ( þ ) and e cos ( þ ). Hence the
trigonometric identities
e sinð þ Þ¼
p sin þ q cos
ffiffiffiffi
L
p
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
1
G
2L
r
e co sð þ Þ¼
p cos q sin
ffiffiffiffi
L
p
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
1
G
2L
r
½105
together with G = (1=2)(p
2
þ q
2
) imply that [103] is
analytic near p = q = 0 and L > 0, 2 [0, 2]. The
Hamiltonian becomes analytic and the new coordi-
nates are suitable to describe motions crossing the
origin: for example, by setting
C ¼
def
1
2
1
p
2
þ q
2
4L
L
1=2
[100] becomes
H¼
g
2
2L
2
!L þ !
1
2
ðp
2
þ q
2
Þ
þ
"
ð
1
2
ðp
2
þ q
2
ÞÞ
"g
2R
ðL
1
2
ðp
2
þ q
2
ÞÞ
4
g
2
R
2
ð3 cos 2 ðð11 cos þ 3 cos 3Þp
ð7 sin þ 3 sin 3ÞqÞCÞ½106
The KAM theorem does not apply in the form
discussed above to ‘‘Cartesian coordinates,’’ that is,
when, as in [106], the unperturbed system is not
assigned in action–angle variables. However, there
are versions of the theorem (actually its corollaries)
which do apply and therefore it becomes possible to
obtain some results even for the perturbations of
circular motions by the techniques that have been
illustrated here.
Likewise, the Hamiltonian of the rigid body with
a fixed point O and subject to analytic external
forces becomes singular, if expressed in the action–
angle coordinates of Depr it, when the body motion
nears a rotation around a principal axis or, more
generally, nears a configuration in which any two of
Introductory Article: Classical Mechanics 29
the axes i
3
, z,orz
0
coincide (i.e., any two among the
principal axis, the angular momentum axis a nd the
inertial z-axis coincide; see the section ‘‘Rigid
body’’). Nevertheless, by imitating the procedure
just described in the simpler cases of the circular
three-body problem, it is possible to enlarge the
phase space so that in the new coordinates the
Hamiltonian is analytic near the singular
configurations.
A regularization also arises when considering
collisional orbits in the unrestricted planar three-
body problem. In this respect, a very remarkable
result is the regularization of collisional orbits in the
planar three-body problem. After proving that if the
total angular momentum does not vanish, simulta-
neous collisions of the three masses cannot occur
within any finite time interval, the question is
reduced to the regularization of two-body collisions,
under the assumption that the total angular momen-
tum does not vanish.
The local change of coordinates, which changes the
relative position coordinates (x, y) of two colliding
bodies as (x, y) !(, ), with x þ iy = ( þ i)
2
, is not
one to one, hence it has to be regarded as an
enlargement of the positions space, if points with
different (, ) are considered different. However, the
equations of motion written in the variables , have
no singularity at , = 0(L
EVI-CIVITA).
Another celebrated regularization is the regular-
ization of the Sch wartzschild metric, i.e., of the
general relativity version of the two-body problem:
it is, however, somewhat out of the scope of this
review (S
YNGE,KRUSKAL).
For more details, the reader is refered to Levi-
Civita (1956).
Appendix 1: KAM Resummation Scheme
The idea to control the ‘‘remaining contributions’’ is to
reduce the problem to the case in which there are no
pairs of lines that follow each other in the tree order
and which have the same current. Mark by a scale
label ‘‘0’’ the lines, see [74], [83], of a tree whose
divisors C=w
0
:n(l)are>1: these are lines which give
no problems in the estimates. Then mark by a scale
label ‘‘1’’ the lines with current n(l) such that
jw
0
n(l)j2
nþ1
for n = 1 (i.e., the remaining lines).
The lines labeled 0 are said to be on scale 0, while
those labeled 1 are said to be on scale 1. A cluster
of scale 0 will be a maximal collection of lines of
scale 0 forming a connected subgraph of a tree .
Consider only trees
0
2
0
of the family
0
of
trees containing no cluster s of lines with scale label
0 which have only one line entering the cluster and
one exiting it with equal current.
It is useful to introduce the notion of a line ‘
1
situated ‘‘between’’ two lines ‘, ‘
0
with ‘
0
>‘: this
will mean that ‘
1
precedes ‘
0
but not ‘.
All trees in which there are some pairs l
0
> l of
consecutive lines of scale label 1 which have equal
current and such that all lines between them bear
scale label 0 are obtained by ‘‘inserting’’ on the lines
of trees in
0
with label 1 any number of clusters
of lines and nodes, with lines of scale 0 and with the
property that the sum of the harmonics of the nodes
inserted vanishes.
Consider a line l
0
2
0
2
0
linking nodes v
1
< v
2
and labeled 1 and imagine inserting on it a cluster
of lines of scale 0 with sum of the node harmonics
vanishing and out of which emerges one line
connecting a node v
out
in to v
2
and into which
enters one line linking v
1
to a node v
in
2 . The
insertion of a k–lines, jj= (k þ 1)-nodes, cluster
changes the tree value by replacing the line factor,
that will be briefly called ‘‘value of the cluster ’’, as
n
v
1
n
v
2
w
0
nðl
0
Þ
2
!
ðn
v
1
Mð; nðl
0
ÞÞn
v
2
Þ
w
0
nðl
0
Þ
2
1
w
0
nðl
0
Þ
2
½107
where M is an ‘ ‘ matrix
M
rs
ð;nðl
0
ÞÞ ¼
"
jj
k!
out; r
in; s
Y
v2
ðf
n
v
Þ
Y
l2
n
v
n
v
0
w
0
nðlÞ
2
if ‘ = v
0
v denotes a line linking v
0
and v. Therefore, if
all possible connected clusters are inserted and the
resulting values are added up, the result can be taken
into account by attributing to the original line l
0
a
factor like [107] with M
(0)
(n(l
0
)) =
def
P
M(; n(l
0
))
replacing M(; n(l
0
)).
If several connected clusters are inserted on the
same line and their values are summed, the result is
a modification of the factor associated with the line
l
0
into
X
1
k¼0
n
v
1
M
ð0Þ
ðnðl
0
ÞÞ
w
0
nðl
0
Þ
2
!
k
n
v
2
1
w
0
nðl
0
Þ
2
¼ n
v
1
1
w
0
nðl
0
Þ
2
M
ð0Þ
ðnðl
0
ÞÞ
n
v
2
!
½108
The series defining M
(0)
involves, by construction, only
trees with lines of scale 0, hence with large divisors, so
that it converges to a matrix of small size of order "
(actually "
2
, more precisely) if " is small enough.
Convergence can be established by simply remark-
ing that the series defining M
(1)
is built with lines
with values >(1=2) of the propagator, so that it
certainly converges for " small enough (by the
estim ates in the section ‘‘Perturbi ng funct ions,’’
where the propagators were ident ically 1) and the
30 Introductory Article: Classical Mechanics

sum is of order " (actually "
2
), hence <1. However,
such an argument cannot be repeated when dealing
with lines with smaller propagators (which still have
to be discussed). Therefore, a method not relying on
so trivial a remark on the size of the propagators has
eventually to be used when considering lines of scale
higher than 1, as it will soon become neces sary.
The advantage of the collection of terms achieved
with [108] is that we can represent h as a sum of
values of trees which are simpler because they
contain no pair of lines of scale 1withinbetween
lines of scale 0 with total sum of the node harmonics
vanishing. The price is that the divisors are now more
involved and we even have a problem due to the fact
that we have not proved that the series in [108]
converges. In fact, it is a geometric series whose value
is the RHS of [108] obtained by the sum rule [79]
unless we can prove that the ratio of the geometric
series is <1. This is trivial in this case by the previous
remark: but it is better to note that there is another
reason for convergence, whose use is not really
necessary here but will become essential later.
The property that the ratio of the geometric series
is <1 can be regarded as due to the consequence of
the cancell ation mentione d in the section ‘‘Q uasi-
perio dicity an d KAM stability ’’ which can be
shown to imply that the ratio is <1 because
M
(0)
(n) = "
2
(w
0
n)
2
m
(0)
(n) with C jm
(0)
(n)j< D
0
for some D
0
> 0 and for all j"j <"
0
for some "
0
.
Then for small " the divisor in [108] is essentially
still what it was before starting the resummation.
At this point, an induction can be started. Consider
trees evaluated with the new rule and place a scale
level ‘ ‘2’ ’ on the lines with C jw
0
n(l)j2
nþ1
for
n = 2: leave the label ‘ ‘0’’ on the lines already marked
so and label by ‘ ‘1’’ the other lines. The lines of scale
‘ ‘1’’ will satisfy 2
n
< jw
0
n(l)j2
nþ1
for n = 1.
The graphs will now possibly contain lines of scale 0,
1or2 while lines with label ‘ ‘1’’ no longer can
appear, by construction.
A cluster of scale 1 will be a maximal collection of
lines of scales 0, 1 forming a connected subgraph of
a tree and containing at least one line of scale 1.
The construction carried out by considering clusters
of scale 0 can be repeated by considering trees
1
2
1
,
with
1
the collection of trees with lines marked 0, 1,
or 2 and in which no pairs of lines with equal
momentum appear to follow each other if between
them there are only lines marked 0 or 1.
Insertion of connected clusters of such lines on a
line l
0
of
1
leads to define a matrix M
(1)
formed by
summing tree values of clusters with lines of scales
0 or 1 evaluated with the line fact ors defined in
[107] and with the restriction that in there are no
pairs of lines ‘<‘
0
with the same current and which
follow each other while any line between them has
lower scale (i.e., 0), here ‘‘between’’ means ‘‘preced-
ing l
0
but not preceding l,’’ as above.
Therefore, a scale-independent method has to be
devised to check the convergence for M
(1)
and for the
matrices to be introduced later to deal with even
smaller propagators. This is achieved by the following
extension of Siegel’s theorem mentioned in the section
‘‘Quasiperiodicity and KAM stability’’:
Theorem 8 Let w
0
satisfy [74] and set w = Cw
0
.
Consider the contribution to the sum in [82] from
graphs in which
(i) no pairs ‘
0
>‘ of lines which lie on the same
path to the root carry the same current n if all
lines ‘
1
between them have current n(‘
1
) such
that jw n(‘
1
)j > 2jw nj;
(ii) the node harmonics are bounded by jnjN for
some N.
Then the number of lines ‘ in with divisor w n
‘
satisfying 2
n
< jw n
‘
j2
nþ1
does not exceed
4 Nk2
n=
, n = 1, 2, ....
This implies, by the same estimates in [85], that
the series defining M
(1)
converges. Again, it must be
checked that there are cancellations implying that
M
(1)
(n) = "
2
(w
0
n)
2
m
(1)
(n) with jm
(1)
(n)j < D
0
for
the same D
0
> 0 and the same "
0
.
At this point, one deals with trees containing only
lines carrying labels 0, 1, 2, and the line factors for
the lines ‘ = v
0
v of scale 0 are n
v
0
n
v
=(w
0
n(‘))
2
,
those of the lines ‘ = v
0
v of scale 1 have line factors
n
v
0
(w
0
n(‘)
2
M
(0)
(n(‘)))
1
n
v
, and those of the
lines ‘ = v
0
v of scale 2 have line factors
n
v
0
ðw
0
nð‘Þ
2
M
ð1Þ
ðnð‘ÞÞÞ
1
n
v
Furthermore, no pair of lines of scale ‘‘1’’ or of scale
‘‘2’’ with the same momentum and with only lines
of lower scale (i.e., of scale ‘‘0’’ in the first case or of
scale ‘‘0’’, ‘‘1’’ in the second) between them can
follow each other.
This procedure can be iterated until, after infi-
nitely many steps, the problem is reduced to the
evaluation of tree values in which each line carries a
scale label n and there are no pairs of lines which
follow each other and which have only lines of
lower scale in between. Then the Siegel argument
applies once more and the series so resumed is an
absolutely convergent series of functions analytic in
": hence the original series is convergent.
Although at each step there is a lower bound on the
denominators, it would not be possible to avoid using
Siegel’s theorem. In fact, the lower bound would become
worse and worse as the scale increases. In order to check
Introductory Article: Classical Mechanics 31
the estimates of the constants D
0
, "
0
which control the
scale independence of the convergence of the various
series, it is necessary to take advantage of the theorem,
and of the absence (at each step)ofthenecessityof
considering trees with pairs of consecutive lines with
equal momentum and intermediate lines of higher scale.
One could also perform the analysis by bounding
h
(k)
order by order with no resummations (i.e.,
without changing the line factors) and exhibiting the
necessary cancellations. Alternatively, the paths that
Kolmogorov, Arnol’ d and Moser used to prove
the first three (somewhat differen t) versions of the
theorem, by successive approximations of the
equations for the tori, can be followed.
The invariant tori are Lagrangian manifolds just
as the unperturbed ones (cf. comments after [31])
and, in the case of the Hamiltonian [80], the
generating function A y þ (A, y ) can be
expressed in terms of their parametric equations
ðA; y Þ¼Gðy Þþa y þhðy ÞðA w hðy ÞÞ
¶
y
Gðy Þ¼
def
hðy Þþh
ðy Þ¶
y
h
ðy Þa
a ¼
def
Z
ðhðy Þþh
ðy Þ¶
y
h
ðy ÞÞ
dy
ð2Þ
‘
¼
Z
h
ðy Þ¶
y
h
ðy Þ
dy
ð2Þ
‘
½109
where =(w ¶
y
) and the invariant torus corre-
sponds to A
0
= w in the map a = y þ¶
A
F(A, y ) and
A
0
= A þ ¶
y
(A, y ). In fact, by [109] the latter
becomes A
0
= A h and, from the second of [75]
written for f depending only on the angles a,itis
A = w þh when A, a are on the invariant torus.
Note that if a exists it is necessarily determined by the
third relation in [109] but the check that the second
equation in [109] is soluble (i.e., that the RHS is an exact
gradient up to a constant) is nontrivial. The canonical
map generated by A y þ F(A, y ) is also defined for A
0
close to w and foliates the neighborhood of the invariant
torus with other tori: of course, for A
0
6¼ w the tori
defined in this way are, in general, not invariant.
The reader is referred to Gallavotti et al. (2004)
for more details.
Appendix 2: Coriolis and Lorentz
Forces – Larmor Precession
Larmor precessio n refers to the motion of an
electrically charge d particle in a magnetic field H
(in an inertial frame of reference). It is due to the
Lorentz force which, on a unit mass with unit
charge, produces an acceleration
€
R = v ^ H if the
speed of light is c = 1.
Therefore, if H = Hk is directed along the k-axis,
the acceleration it pr oduces is the same that the
Coriolis force would impress on a unit mass located
in a reference frame which rotates with angular
velocity !
0
k around the k-axis if H = 2!
0
k.
The above remarks imply that a homogeneous
sphere electrically charged uniformly with a unit
charge and freely pivoting about its center in a
constant magnetic field H dire cted along the k-axis
undergoes the same motion as it would follow if not
subject to the magnetic field but seen in a
noninertial reference frame rotating at constant
angular velocity !
0
around the k-axis if H and !
0
are related by H = 2!
0
: in this frame, the Coriolis
force is interpreted as a magnetic field.
This holds, however, only if the centrifugal force
has zero moment with respect to the center: true in
the spherical symmetry case only. In spherically
nonsymmetric cases, the centrifugal forces have in
general nonzero moment, so the equivalence
between Coriolis force and the Lorentz force is
only approximate.
The Larmor theorem makes this more precise. It
gives a quantitative estimate of the difference between
the motion of a general system of particles of mass m
in a magnetic field and the motion of the same
particles in a rotating frame of reference but in the
absence of a magnetic field. The approximation is
estimated in terms of the size of the Larmor frequency
eH=2mc, which should be small compared to the
other characteristic frequencies of the motion of the
system: the physical meaning is that the centrifugal
force should be small compared to the other forces.
The vector potential A for a constant magnetic
field in the k-direction, H = 2!
0
k,isA = 2!
0
k ^ R
2!
0
R
?
. Therefore, from the treatment of the Coriolis
force in the sect ion ‘‘Three -body prob lem’’ (see
[95]), the motion of a charge e with mass m in a
magnetic field H with vector potential A and subject
to other forces with potential W can be described, in
an inertial frame and in generic units, in which the
speed of light is c, by a Hamiltonian
H¼
1
2m
p
e
c
A
2
þWðRÞ½110
where p = m
_
R þ (e=c)A and R are canonically con-
jugate variables.
Further Reading
Arnol’d VI (1989) Mathematical Methods of Classical Mechanics.
Berlin: Springer.
Calogero F and Degasperis A (1982) Spectral Transform and
Solitons. Amsterdam: North-Holland.
32 Introductory Article: Classical Mechanics

Chierchia L and Valdinoci E (2000) A note on the construction of
Hamiltonian trajectories along heteroclinic chains. Forum
Mathematicum 12: 247–255.
Fasso` F (1998) Quasi-periodicity of motions and complete
integrability of Hamiltonian systems. Ergodic Theory and
Dynamical Systems 18: 1349–1362.
Gallavotti G (1983) The Elements of Mechanics. New York:
Springer.
Gallavotti G, Bonetto F, and Gentile G (2004) Aspects of the
Ergodic, Qualitative and Statistical Properties of Motion.
Berlin: Springer.
Kolmogorov N (1954) On the preservation of conditionally
periodic motions. Doklady Akademia Nauk SSSR 96:
527–530.
Landau LD and Lifshitz EM (1976) Mechanics. New York:
Pergamon Press.
Levi-Civita T (1956) Opere Matematiche. Accademia Nazionale
dei Lincei. Bologna: Zanichelli.
Moser J (1962) On invariant curves of an area preserving
mapping of the annulus. Nachricten Akademie Wissenschaften
Go¨ ttingen 11: 1–20.
Nekhorossev V (1977) An exponential estimate of the time of
stability of nearly integrable Hamiltonian systems. Russian
Mathematical Surveys 32(6): 1–65.
Poincare´ H (1987) Me´thodes nouvelles de la me´canique cele`ste
vol. I. Paris: Gauthier-Villars. (reprinted by Gabay, Paris,
1987).
Introductory Article: Differential Geometry
S Paycha, Universite
´
Blaise Pascal, Aubie
`
re, France
ª 2006 Elsevier Ltd. All rights reserved.
Differential geometry is the study of differential
properties of geometric objects such as curves,
surfaces and higher-dimensional manifolds endowed
with additional structures such as metrics and
connections. One of the main ideas of differential
geometry is to apply the tools of analysis to
investigate geometric problems; in particular, it
studies their ‘‘infinitesimal parts,’’ thereby lineariz-
ing the problem. However, historically, geometric
concepts often anticipated the analytic tools
required to define them from a differential geometric
point of view; the notion of tangent to a curve, for
example, arose well before the notion of derivative.
In its barely more than two centurie s of existence,
differential geometry has always had strong (often
two-way) interactions wi th physics. Just to name a
few examples, the theory of curves is used in
kinematics, symplectic manifolds arise in Hamilto-
nian mechanics, pseudo-Riemannian manifolds in
general rel ativity, spinors in quantum mech anics, Lie
groups and principal bundles in gauge theory, and
infinite-dimensional manifolds in the path-integral
approach to quantum field theory.
Curves and Surfaces
The study of differential properties of curves and
surfaces resulted from a combination of the coordi-
nate method (or analytic geometry) developed by
Descartes and Fermat during the first half of the
seventeenth century and infinitesimal calculus devel-
oped by Leibniz and Newton during the second half
of the seventeenth and beginning of the eighteenth
century.
Differential geometry appeared later in the eight-
eenth century with the works of Euler Recherches
sur la courbure des surfaces (1760) (Investigations
on the curvature of surfaces) and Monge Une
application de l’analyse a`lage´ome´trie (1795) (An
application of analysis to geometry). Until Gauss’
fundamental article Disquisitiones generales circa
superficies curvas (General investigations of curved
surfaces) published in Latin in 1827 (of which one
can find a partial translation to English in Spivak
(1979)), su rfaces embedded in R
3
were either
described by an equation, W(x, y, z) = 0, or by
expressing one variable in terms of the others.
Although Euler had already noticed that the
coordinates of a point on a surface could be
expressed as functions of two independent variables,
it was Gauss who first made a systematic use of such
a parametric representation, thereby ini tiating the
concept of ‘‘local chart’’ which underlies differe ntial
geometry.
Differentiable Manifolds
The actual notion of n-manifold independent of a
particular embedding in a Euclidean space goes back
to a lecture U
¨
ber die Hypothesen, welche der
Geometrie zu Grunde liegen (On the hypotheses
which lie at the foundations of geometry) (of which
one can find a translation to English and comments
in Spivak (1979)) delivered by Riemann at Go¨ ttingen
University in 1854, in which he makes clear the
fact that n-manifolds are locally like n-dimensional
Euclidean space. In his work, Riemann mentions
the existence of infinite-dimensional manifolds,
such as function spaces, which today play an
important role since they naturally arise as config-
uration spaces in quantum field theories.
In modern language a differentiable manifold
modeled on a topolog ical space V (which can be
Introductory Article: Differential Geometry 33

finite dimensional, Fre´chet, Banach, or Hilbert for
example) is a topological space M equipped with a
family of local coordinate charts (U
i
,
i
)
i2I
such that the
open subsets U
i
M cover M and where
i
: U
i
! V,
i 2 I, are homeomorphisms which give rise to smooth
transition maps
i
1
j
:
j
(U
i
\ U
j
) !
i
(U
i
\ U
j
).
An n-dimensional differentiable manifold is a differ-
entiable manifold modeled on R
n
. The sphere
S
n1
:= {(x
1
, ..., x
n
) 2 R
n
,
P
n
i = 1
x
2
i
= 1} is a differenti-
able manifold of dimension n 1.
Simple differentiable curves in R
n
are one-
dimensional differentiable manifolds locally speci-
fied by coordinates x(t) = (x
1
(t), ..., x
n
(t)) 2 R
n
,
where t 7!x
j
(t) is of class C
k
. The tangent at point
x(t
0
) to such a curve, which is a straight line passing
through this point with direction given by the vector
x
0
(t
0
), generalizes to the concept of tangent space
T
m
M at point m 2 M of a smooth manifold M
modeled on V which is a vector space isomorphic to
V spanned by tangent vectors at point m to curves
(t) of class C
1
on M such that (t
0
) = m.
In order to make this more precise, one needs the
notion of differentiable mapping. Given two differ-
entiable manifolds M and N, a mapping f : M ! N
is differentiable at point m if, for every chart (U , )
of M containing m and every chart (V, )ofN such
that f (U) V,themapping f
1
: (U) ! (V)
is differentiable at point (m). In particular, differenti-
able mappings f : M ! R form the algebra C
1
(M, R)
of smooth real-valued functions on M. Differentiable
mappings :[a, b] ! M from an interval [a, b] R to
a differentiable manifold M are called ‘‘differentiable
curves’’ on M. A differentiable mapping f : M ! N
which is invertible and with differentiable inverse
f
1
: N ! M is called a diffeomorphism.
The derivative of a function f 2 C
1
(M, R) along
acurve :[a, b] ! M at point (t
0
) 2 M with t
0
2
[a, b]isgivenby
Xf :¼
d
dt
j
t¼t
0
f ðtÞ
and the map f 7!Xf is called the tangent vector to
the curve at point (t
0
). Tangent vectors to some
curve :[a, b] ! M at a given point m 2 ([a, b])
form a vector space T
m
M called the ‘‘tangent space’’
to M at point m.
A (smooth) map which, to a point m 2 M, assigns
a tangent vector X 2 T
m
M is called a (smooth)
vector field. It can also be seen as a derivation
~
X : f 7!Xf on C
1
(M, R) defined by (
~
Xf )(m):=
X(m)f for any m 2 M and the bracket of vector
fields is thereby defined from the operator bracket
g
[X, Y]:=
~
X
~
Y
~
Y
~
X. The linear operations on
tangent vectors carry out to vector fields (X þ
Y)(m):= X(m) þ Y(m), (X)(m):= X(m) for any
m 2 M and for any X, Y 2 T
m
M, 2 R so that
vector fields on M build a linear space.
One can generate tangent vectors to M via local
one-parameter groups of differentiable transforma-
tions of M, that is, mappings (t, m) 7!
t
(m) from
], [ U to U (with >0 and U M an
open subset of M) such that
0
= Id,
tþs
=
t
s
8s, t 2 ], [ with t þ s 2 ], [ and m 7!
t
(m)isa
diffeomorphism of U onto an open subset
t
(U).
The tangent vector at t = 0 to the curve (t ) =
t
(m)
yields a tangent vector to M at point m = (0).
Conversely, when M is finite dimensional, the
fundamental theorem for systems of ordinary
equations yields, for any vector field X on M, the
existence (around any point m 2 M)ofa
local one-parameter group of local transformations
:], [ U !M (with U an open subset contain-
ing m) which induces the tangent vector
X(m) 2 T
m
M.
A differentiable mapping : M !N induces a map
(m):T
m
M !T
(m)
M defined by
Xf = X(f ).
An ‘ ‘immersion’’ of a manifold M in a manifold N is a
differentiable mapping : M !N such that the maps
(m) are injective at any point m 2 M.Suchamapis
an embedding if it is moreover injective in which case
(M) N is a submanifold of N. The unit sphere S
n
is a submanifold of R
nþ1
. Whitney showed that every
smooth real n-dimensional manifold can be embedded
in R
2nþ1
.
A differentiable manifold whose coordinate charts
take values in a complex vector space V and whose
transition maps are holomorphic is called a complex
manifold, which is complex n-dimensional if V = C
n
.
The complex projective space CP
n
,theunionof
complex straight lines through 0 in C
nþ1
,isa
compact complex manifold of dimension n. Similarly
to the notion of differentiable mapping between
differentiable manifolds, we have the notion of
holomorphic mapping between complex manifolds.
A smooth family m 7!J
m
of endomorphisms of the
tangent spaces T
m
M to a differentiable manifold M such
that J
2
m
= Id gives rise to an almost-complex manifold.
The prototype is the almost-complex structure on C
n
defined by J(@
x
i
) = @
y
i
; J(@
y
i
) = @
x
i
with z = (x
1
þ
iy
1
, ..., x
n
þ iy
n
) 2 C
n
which can be transferred to a
complex manifold M by means of local charts. An
almost-complex structure J on a manifold M is called
complex if M is the underlying differentiable manifold
of a complex manifold which induces J in this way.
Studying smooth functions on a differentiable
manifold can provide information on the topology
of the manifold: for example, the behavior of a
smooth function on a compact manifold as its
critical points strongly restricted by the topological
properties of the manifold. This leads to the Morse
34 Introductory Article: Differential Geometry