Kallen A. Understanding Biostatistics
Подождите немного. Документ загружается.


13
Remarks on some estimation
methods
13.1 Introduction
We have a few loose ends to tie up before we conclude this book. They are all concerned
with estimation methods and model misspecification and are mathematical in nature. The
mathematically less inclined reader may wish to skip these discussions, but is advised to have
at least a casual look, since we will address the analysis of some more complex data that may
be of general interest. We need to reiterate what was said in the preface – even if this chapter is
mathematical in nature, it is an overview, with less attention to details. The chapter is divided
into two main parts: the first is a holistic discussion about estimating equations in general and
maximum likelihood theory in particular, and the second discusses how to analyze data with
repeated measurements within subjects.
We have often estimated parameters from an (estimating) equation U(θ) = 0, and used
the distributional properties of the stochastic variable U(θ) to obtain knowledge (e.g., con-
fidence intervals) about the parameter θ. In the first part of this chapter we will discuss this
approach in more generality. This will also help us to gain some understanding of why we
sometimes parameterize in θ, sometimes in its logarithm. We will link this to the well-known
maximum likelihood theory, which (essentially) is the special, but very important, case where
the estimating equation is the derivative of some function. This discussion will introduce a
special variance estimate, the robust variance, which is an alternative estimator of the vari-
ance also for likelihood estimators. The robust variance is less accurate than the one derived
from likelihood theory, but has the virtue of being less sensitive to model misspecification,
since it is derived from the estimating equation alone. This gives us an opportunity to use the
wrong model and still draw the right conclusion. One illustration of this will be the analysis
of recurrent events in a heterogeneous population, a discussion that starts the second part of
this chapter.
Understanding Biostatistics, First Edition. Anders K¨all´en.
© 2011 John Wiley & Sons, Ltd. Published 2011 by John Wiley & Sons, Ltd. ISBN: 978-0-470-66636-4

344 REMARKS ON SOME ESTIMATION METHODS
This second part continues the discussion on the subject-specific approach to dose
response, initiated in Section 10.6, except that this time we will not estimate the model
by reducing it to a population averaged model. Here we will take as our starting point the
likelihood for the problem. The problem with the likelihood approach for these non-linear,
though not for the linear, mixed-effects models is that their likelihood consists of multidi-
mensional integrals that are hard to compute accurately. Methods exist, but they are often too
computer-intensive at present for routine use, so we often need to use various approximations.
We will have a quick look at some of these approximations and demonstrate why we need
to understand how the estimation method works, in order to understand what we are actually
estimating – the population averaged or the subject-specific aspect of the problem.
13.2 Estimating equations and the robust variance estimate
The way we have carried out estimation in statistical models has mostly followed a certain
pattern. We start with a function U(x, θ) of the data x (both outcome variables and explanatory
variables) and an unknown parameter vector θ, such that the equation U(x, θ) = 0 defines
our estimate of θ as a function of x. Important examples of such functions U(x, θ) include
U(x, θ) = x
11
x
22
− θx
12
x
21
and U(x, θ) = x
11
− E
θ
(x
11
) used to estimate the odds ratio in
Section 5.3, the function
G
m
(x, θ)dF
n
(x) −
1
2
associated with the Wilcoxon test, and the
different functions discussed in Chapter 12, modeling survival data. Some of these will be
revisited below. The function U(x, θ), together with the sampling scheme, defines a stochastic
variable which depends on a parameter, which we denote by U(θ). The estimating equation
is then written as U(θ) = 0. As usual the point estimate of θ obtained from a particular set of
data is denoted θ
∗
, whereas the general solution of the equation (which is a function of the
data) is the estimator of θ, is a stochastic variable and is denoted by
ˆ
θ.
The basic requirement on U(θ) is that it is unbiased, which in this case means that it has
mean zero:
E
θ
(U(θ)) =
U(x, θ)dF
θ
(x) = 0.
Here F
θ
(x) is the CDF for the data set, a multidimensional CDF which we do not need to
be explicit about. It is important to note, and will be discussed further below, that it is the
equation that is unbiased; the estimator
ˆ
θ need not be so. Usually the setup is such that we
have a stochastic variable X, representing a unit of data (data from one subject), together
with a function U(x, θ) such that E
θ
(U(X, θ)) = 0, and we have at our disposal a set of n
independent observations x
i
of X from which θ should be estimated. This means that we
estimate θ from the average of the observed values of U(X, θ),
1
n
n
i=1
U(x
i
,θ) = 0.
(Note that when θ is a vector with s components, we need the estimating function to consist
of s independent components in order for this to be solvable.) This is useful, since it allows
us to appeal to large-sample theory when we wish to derive confidence statements about θ.In
fact, we often appeal to the CLT to obtain that
U(θ) ∈ AsN
s
(0,V
θ
(U(θ)).
ESTIMATING EQUATIONS AND THE ROBUST VARIANCE ESTIMATE 345
The key implication of this assumption is that
U(θ)
t
V
θ
(U(θ))
−1
U(θ) ∈ Asχ
2
(s), (13.1)
which we can use to define the (approximative) confidence function
C(θ) = χ
s
(U(θ)
t
V
θ
(U(θ))
−1
U(θ))
for θ, from which we can subsequently deduce confidence intervals and p-values. In order to
capitalize on this we need to know the variance or, at least, have an estimate of it. In some
cases where we only have an estimate of the variance to insert into the expression above, we
might wish to modify the distributional statement in equation (13.1) in order to obtain better
precision in the confidence statements. If, for example, we analyze a linear model of Gaussian
variables we will have an F distribution after insertion of the sample variance as an estimate
of the true variance. In many other applications we instead appeal to large-sample theory and
keep the χ
2
(s) distribution, accepting that the results are approximate.
This discussion is the general version of approaches we have used for specific problems.
Now is the place to compare this with what is standard practice, which is to make one further
approximation in equation (13.1), in order to obtain an approximation to the variance of the
estimator
ˆ
θ of θ. Recall from the definition of
ˆ
θ that we have that U(
ˆ
θ) = 0, which means that
when
ˆ
θ is close to the true value θ, we have approximately that
0 = U(
ˆ
θ) ≈ U(θ) + U
(θ)(
ˆ
θ − θ).
This gives us a way (with the appropriate assumptions, which we ignore together with all
technical details) to find an approximation to the distribution of
ˆ
θ. For this we make one
further approximation and replace −U
(θ) with its expected value,
I(θ) =−E
θ
(U
(θ)),
which is called the information matrix (at least in the context of likelihood theory). This gives
us the approximation U(θ) ≈ I(θ)(
ˆ
θ − θ), using which we can rewrite equation (13.1) as
(
ˆ
θ − θ)
t
I(θ)
t
V
θ
(U(θ))
−1
I(θ)(
ˆ
θ − θ) ∈ Asχ
2
(s).
We therefore have that the variance of
ˆ
θ is given, at least approximately, by the matrix
V (
ˆ
θ) = I(θ)
−1
V
θ
(U(θ))I(θ)
−t
.
We often compute this expression only at the point estimate θ
∗
of θ, and we also approximate
I(θ
∗
) with its observed value, the derivative −U
(θ
∗
). In order to compute V (
ˆ
θ) we also need
an estimate of V
θ
(U(θ
∗
)), which we obtain in the crudest of ways, by computing the average
n
−1
i
U(x
i
,θ
∗
)U(x
i
,θ
∗
)
t
. In all, this gives us an estimate of V (
ˆ
θ) which is referred to as
the robust variance (another name often used is sandwich variance). It is robust in the sense
that if we have an estimating equation derived from some probability model, this estimate is
less sensitive to the validity of the modeling assumptions than the ordinary variance estimate
is. When we use this approximation to compute confidence information, we refer to it as the
quadratic approximation of the confidence function (around the estimate θ
∗
). The price paid
for using the robust variance estimate is that in general it is not a very efficient estimator, and
we may need rather large samples in order to obtain reasonable accuracy.
346 REMARKS ON SOME ESTIMATION METHODS
We may note that even though we assume that there is an underlying probability model
which makes the stochastic variable U(θ) unbiased, this model is not really made explicit
anywhere when we use the robust variance. It is there in the background to assure that when
we estimate θ from the estimating equation, we are actually estimating a real parameter. We
do not use the probability model in any more explicit way.
By construction the stochastic variable U(θ) is unbiased, but that does not necessarily
mean that the estimate
ˆ
θ is unbiased. It is not hugely biased, because
E
θ
(
ˆ
θ) ≈ θ + I(θ)
−1
E
θ
(U(θ)) = θ,
an approximation which is better the larger the sample is. However, higher-order approxima-
tions may reveal some deviance to this, with resulting bias in small samples. This is further
discussed in Appendix 13.A.
For the rest of this chapter we will go through a few examples. All of these revisit dis-
cussions we have already had, but will provide some information about the relation between
different approximations. We also use these examples to highlight some further important
considerations, such as the importance of having the ‘right’ parameterization when we wish
to use the quadratic approximation. In the next section we will discuss the application of this
general theory to the special case of maximum likelihood estimation.
Example 13.1 In Example 12.4 we computed the two-sided confidence function for the
log-rank test. The estimating function can be written as
U(θ) = N
n
(∞) −
∞
0
Y
n
(t)
Y
n
(t) + θY
m
(t)
dN
+
(t),
and for its variance we have the estimate
ˆ
V (θ) =
∞
0
Y
m
(t)Y
n
(t)θ
(Y
n
(t) + θY
m
(t))
2
dN
+
(t).
The confidence function for θ is then obtained by applying the CDF for a χ
2
(1) distribution
to U(θ)
2
/
ˆ
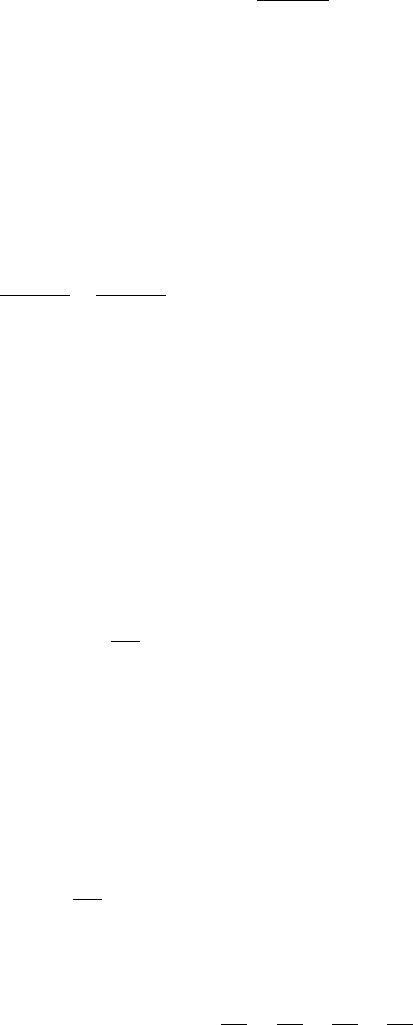
V (θ). This ratio, as a function of θ, is shown in Figure 13.1 as the solid black curve;
the corresponding 95% confidence interval for θ is obtained as the intersection of this curve
with the 95th percentile for the χ
2
(1) distribution (shown as the dashed horizontal line).
There are two more curves in Figure 13.1. The gray curve is obtained from the quadratic
approximation based on θ. This requires that we compute the derivative of U(θ), which is
related to the variance estimate above through
ˆ
V (θ) = θU
(θ). We therefore have that the
robust variance estimate is
ˆ
I(θ)
−1
ˆ
V (θ)
ˆ
I(θ)
−1
= θ
ˆ
V (θ)
−1
, with
ˆ
I(θ) =−U
(θ), and the ratio
(θ − θ
∗
)
2
ˆ
V (θ
∗
)/θ
∗
is what is shown as the gray curve in Figure 13.1. This is a quadratic
function, symmetric around the point estimate θ
∗
, and we see that it is in poor agreement with
the original function, defining confidence intervals that lie to the left of those derived from
the original function. (The reason why we plot the percentiles and not confidence levels on
the y-axis is precisely to highlight the quadratic nature of this curve.)
However, if we write θ = e
β
and consider the expressions above as functions of β
instead, we have that
ˆ
V (β) = U
(β). This does not change the black confidence curve in any
way, because that approach is independent of how we parameterize. However, the quadratic
approximation depends on what parameterization we use: the quadratic confidence curve for
β is (β − β
∗
)
2
ˆ
V (β
∗
). Plotted versus β, this would provide a quadratic curve; in Figure 13.1

ESTIMATING EQUATIONS AND THE ROBUST VARIANCE ESTIMATE 347
0
3
6
9
12
15
54321
Hazard ratio
χ
2
(1)-perc
entile
Figure 13.1 Confidence information about the proportional hazards parameter from the
log-rank test, using three different approximations. For an explanation of the different curves,
see Example 13.1.
it is plotted versus θ = e
β
instead as the dashed curve. We see that although it differs
somewhat from the original curve, it is a good approximation to it in any region of interest
(which is defined by the 95th percentile). The lesson is clear: when using the quadratic
approximation, it is important to choose the right parameterization. This, in turn, is related to
the choice of parameter scale in which the distribution of the estimator is best described by a
Gaussian distribution.
In the next example we revisit the problem of estimating confidence intervals for per-
centiles of a distribution (previously discussed in Section 6.5).
Example 13.2 Let F
n
(x) be the e-CDF for a continuous variable, based on a sample of size
n. We wish to estimate the percentile θ = x
p
of the corresponding population CDF F (x). The
estimating equation for this is
U(θ) = F
n
(θ) − p = 0,
and we know that its variance is given by V (U(θ)) = V (F
n
(θ)) = F
c
(θ)
2
τ(θ), where
τ(θ) = F (θ)/nF
c
(θ) if there is no censoring; in the presence of censored data we estimate it
using the Greenwood estimator σ
2
n
of equation (11.7). The confidence functions in the com-
plete and censored data cases are therefore χ
1
(x) applied to
n(F
n
(θ) − p)
2
p(1 − p)
and
(F
n
(θ) − p)
2
(1 − p)
2
σ
2
n
,
respectively. This is the approach that was explored in Chapter 6.
To investigate the corresponding quadratic approximation we need to compute the deriva-
tive of U(θ). For this purpose we redefine the e-CDF F
n
(x) as its piecewise linear version
instead of the staircase version. We then have that U
(θ) = F
n
(θ), which is defined at all points
θ except for the actual observations in the sample. This also implies that the information ma-
trix is I(θ) =−F
(θ), and it follows that
ˆ
θ has the asymptotic variance F
(θ)
−2
V (F
n
(θ)). For
348 REMARKS ON SOME ESTIMATION METHODS
complete data this means that the asymptotic distribution for
ˆ
θ is given by
N
θ,
p(1 − p)
nF
(θ)
2
,
with a minor modification for censored data.
We can also consider the problem of how to simultaneously estimate two percentiles
θ = (x
p
,x
q
), where p<q. For this we define the two-dimensional estimating function
U(θ) = (F
n
(θ
1
) − p, F
n
(θ
2
) − q),
which is such that E(U
(θ)) is the diagonal matrix with entries F
(θ
1
) and F
(θ
2
). When
x<y, the covariance between F
n
(x) and F
n
(y)isgivenbyF
c
(x)F
c
(y)τ(x), from which
we can deduce what the variance matrix for θ looks like, how we should estimate it, and
how to obtain a two-dimensional confidence function for θ. In particular, we find that
the asymptotic correlation between ˆx
p
and ˆx
q
is τ(x
p
)/τ(x
q
), which for complete data re-
duces to
√
p(1 − q)/
√
q(1 − p). This addresses the problem discussed in Box 7.8 in a more
direct way.
In the next example we revisit the Mantel–Haenszel estimator of the odds ratio from an
estimating equation perspective.
Example 13.3 Consider a single 2 × 2 table, for which the conditional distribution of the
upper left element x
11
given the margins is the (non-central) hypergeometric distribution with
the odds ratio parameter θ. The estimating equation is
U(θ) = x
11
x
22
− θx
21
x
12
= 0,
the solution of which is the empirical odds ratio. Its variance is given by
V
θ
(U(θ)) =
1
2n
2
E
θ
((x
11
x
22
+ θx
21
x
12
)(x
11
+ x
22
+ θ(x
21
+ x
12
))).
Here we can either compute this expression explicitly as a function of θ, which is the true
variance, or we can estimate it by inserting the observed values x
ij
from the table cells and
get an estimated variance (still a function of θ). Furthermore,
I(θ) =−E
θ
(U
(θ)) =−E
θ
(x
21
x
12
) =−θ
−1
E
θ
(x
11
x
22
),
and if we denote the empirical odds ratio by θ
∗
, we see that the robust covariance estimator
for θ is given by θ
∗2
V
R
(θ
∗
), where
V
R
(θ) =
1
2n
2
(x
11
x
22
)
−2
(x
11
x
22
+ θx
21
x
12
)(x
11
+ x
22
+ θ(x
21
+ x
12
)).
From this we also get the robust covariance estimate for the empirical log-odds ratio as V
R
(θ
∗
).
Another calculation shows that this is the variance for the logged odds ratio (see Section 4.5.1):
V
R
(θ
∗
) =
1
x
11
+
1
x
12
+
1
x
21
+
1
x
22
.

ESTIMATING EQUATIONS AND THE ROBUST VARIANCE ESTIMATE 349
0
1
2
3
4
χ
2
(1)-percentile
5432
Odds ratio
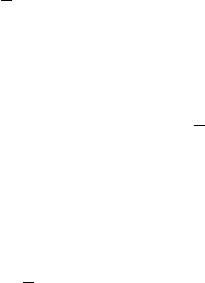
Figure 13.2 Deriving confidence intervals for the odds ratio in a 2 × 2 table. The three
methods discussed in the text are illustrated.
We can graphically illustrate how this approximation works by comparing the
two functions
Q
1
(θ) = U(θ)
2
/V
θ
(U(θ)) and Q
2
(θ) = (ln(θ) − ln(θ
∗
))
2
/V
R
(θ
∗
).
We actually have two versions of Q
1
(θ): one in which we use the true variance and one in
which we use the estimated variance. These three functions are all illustrated in Figure 13.2 for
the first Hodgkin’s lymphoma data set in Section 4.5.1. The solid black curve uses the function
Q
1
(θ) with the true variance as a function of θ, while the gray curve is this function using
the estimate of this variance (still as a function of θ). The dashed curve, which is sandwiched
between these, is Q
2
(θ). The dashed horizontal line defines the intersection level for a 90%
confidence interval, based on the χ
2
(1) distribution. We see that these functions are much in
agreement with each other at the lower confidence limit, but disagree somewhat at the upper
limit. They agree with what we obtained in Figure 5.2 (dashed curves).
How to extend this to a general Mantel–Haenszel pooled odds ratio discussed in Section 5.5
is more or less immediate. The estimating function is the sum over strata,
U(θ) =
n
i=1
1
n
i
(x
i11
x
i22
− θx
i12
x
i21
),
where n
i
is the total number of observations in table i. Applying the knowledge just
obtained for a single cell, we see that the variance in equation (5.3) is derived from the
robust variance for the estimating equation in the example, and is therefore what the quadratic
approximation for the log-odds ratio is based on.
This step from a single 2 × 2 table to a series of tables, that is, the introduction of a
stratified test, can be done in much larger generality. In fact, suppose we have a series of data
sets, each defining an estimating equation U
i
(θ) = 0. We can then define a stratified test by
defining the pooled estimating equation
U(θ) =
i
w
i
U
i
(θ) = 0
350 REMARKS ON SOME ESTIMATION METHODS
for some specified weights. In this way we can introduce both the stratified log-rank test
discussed in Section 12.7 and a stratified Wilcoxon test. In the latter case one usually takes
weights similar to those in the Mantel–Haenszel pooled odds ratio estimate.
Example 13.4 At this point we take a second look at the two quadratic forms discussed
in Section 5.5, which we called the Mantel–Haenszel and Breslow–Day quadratic forms.
If we have a series of N 2 × 2 tables with elements a
k
,b
k
,c
k
,d
k
, the estimating equation
for the odds ratio for a single table is U
k
(θ) = a
k
− E
θ
(a
k
) = 0, where the expectation
is computed assuming a hypergeometric distribution. The pooled estimator function is
therefore U(θ) =
k
U
k
(θ), and a two-sided confidence function can be obtained by
considering U(θ)
2
/V(U(θ)), which is the Mantel–Haenszel quadratic form. We derive the
confidence function for θ by using the fact that this quadratic form has approximately a
χ
2
(1) distribution.
The Breslow–Day quadratic form is the weighted least squares expression for θ. This is a
case where the parameter to be estimated also appears in the variance, and we therefore may
wisht to estimate the parameter using the GLS estimate. This produces precisely the same
estimating equation as above, so the two quadratic forms Q
MH
(θ) and Q
BD
(θ) define the
same test.
We could alternatively argue that Q
BD
(θ) ∈ χ
2
(N) and derive a confidence function from
this. However, similar to the discussion in Section 8.8, this contains two parts: the first ad-
dresses whether it is reasonable that there is a common θ, and the second what we know about
such a θ. It takes more (individual strata cells need to be large; for Q
MH
(θ) we only need to
have either large individual strata cells or many strata, or a combination) to get accuracy when
obtaining confidence intervals for θ, and it is therefore not recommended. Instead we use it
for the other question: given the GLS estimate θ
∗
of θ, is this a reasonable summary of the
different tables? For this we compare Q
BD
(θ
∗
)totheχ
2
(N − 1) distribution.
Our final example in this section refers to the regression analysis in the Cox proportional
hazards model.
Example 13.5 The Cox proportional hazards model solves the equation
U(β) =
1
n
n
i=1
∞
0
(z
i
− ¯z(t, β))dN
i
(t) = 0,
where
¯z(t, β) = ∂
β
ln S
0
(t, β),S
0
(t, β) =
1
n
n
i=1
Y
i
(t)e
z
i
β
.
If we introduce our standard martingales ξ
i
(t) = N
i
(t) −
t
0
Y
i
(s)e
z
i
β
d(s), the requirement
that the estimating equation is an unbiased estimator of β means that we can write
U(β) =
1
n
n
i=1
∞
0
(z
i
− ¯z(t, β))dξ
i
(t).

MAXIMUM LIKELIHOOD THEORY 351
Its variance V
β
(U(β)) is given by
E
β
(U(β)
2
) = E
∞
0
(z − ¯z(t, β))
2
Y(t)e
zβ
d(t)
.
We also have that
U
(β) =−
n
i=1
∞
0
∂
2
ββ
ln S
0
(t, β)dN
i
(t),
and, under the assumption that the ξ
i
(t) are martingales, we see that the information matrix
I(β) is the same as E
β
(U(β)
2
). An alternative estimate of V
β
(U(β)) is
1
n
n
i=1
∞
0
(z
i
(t) − ¯z(t, β))d
ˆ
ξ
i
(t)
2
.
For the estimate
ˆ
ξ
i
(t) we use the all-sample estimate of (t), which will be a function of β.
If we compute this at the point estimate β
∗
and multiply by the inverse of U
(β
∗
), we obtain
the robust estimator for the Cox model estimating equation.
This last example provides us with a way to analyze time-to-event data using the Cox
model also in situations where its model assumptions are not fulfilled, provided we use the
robust variance estimate, and have a sufficiently large sample. In Section 13.4 we will apply
this to the situation with recurrent events, where the assumption of independence of all events
cannot be assumed to hold.
13.3 From maximum likelihood theory to generalized
estimating equations
Our approach to parameter estimation has mostly been to define an equation that should hold
true for the correct parameter value. Usually in statistics parameter estimation starts with
likelihood theory, a methodology which we have also referred to occasionally. Here is the
place to see how this theory relates to that of estimating equations.
When we design an experiment we should (in principle) also have a probability model
for the outcome. The outcome is a sample, x = (x
1
,...,x
n
), and the probability model
is a (multidimensional) CDF F
θ
(x) for the data. The likelihood theory asks the following
question: for which choice of θ is what we see most likely? This means that we introduce the
likelihood function
L(θ) = dF
θ
(x),
computed at the point corresponding to the sample we obtained. For a continuous model this is
a density function, for a discrete model it is a probability function. Having already encountered
a number of examples of this, we proceed directly to the general theory. To obtain the maximal
value of the likelihood, which is also the maximum of ln L(θ), we solve the score equation,
U(θ) = (ln L)
(θ) = 0.

352 REMARKS ON SOME ESTIMATION METHODS
This implies that ∂
θ
dF
θ
(x) = L
(θ) = U(θ)L(θ) = U(θ)dF
θ
(x) (where ∂
θ
denotes
differentiation with respect to θ), which in turn implies that ∂
θ
E
θ
(X) = E
θ
(XU(θ)). The score
equation is the estimating equation of maximum likelihood theory, to which we can apply the
discussion we had in the previous section. However, it is an estimating equation with some spe-
cial properties. First we confirm that it is unbiased, and therefore a valid estimating equation:
E
θ
(U(θ)) =
L
(θ)
L(θ)
dF
θ
(x) = ∂
θ
dF
θ
(x) = 0.
If we differentiate this equation we obtain from the differentiation formula above that
E
θ
(U
(θ)) + E
θ
(U(θ)U(θ)
t
) = 0,
which means that in this case the information matrix equals the variance of the estimating
function, I(θ) = V
θ
(U(θ)). This, in turn, implies that inference about θ is made from
U(θ)
t
I(θ)
−1
U(θ), a stochastic variable whose distribution is often assumed (appealing to
large-sample theory when our experiment is made up of a large number of independent
sub-experiments) to be at least approximately χ
2
(s), where s is the number of parameters.
The next problem is to obtain from this an expression for the variance of
ˆ
θ. We addressed
this problem in the previous section, but we can do slightly more in this case, because U(θ)
is a derivative. We use a second-order Taylor expansion of ln L(θ) around the true value θ.
Inserting the maximum likelihood estimate into this gives the approximation
ln L(
ˆ
θ) ≈ ln L(θ) + U(θ)
t
(
ˆ
θ − θ) +
1
2
(
ˆ
θ − θ)
t
E
θ
(U
(θ))(
ˆ
θ − θ).
We also have that 0 = U(
ˆ
θ) ≈ U(θ) + E
θ
(U
(θ))(
ˆ
θ − θ), so
2(ln L(
ˆ
θ) − ln L(θ)) ≈ (
ˆ
θ − θ)
t
I(θ)(
ˆ
θ − θ). (13.2)
If we can appeal to large-sample theory to deduce that U(θ) has an approximate Gaussian
distribution, the distribution on the right-hand side is approximately χ
2
(s), where s is the
number of components of θ. Applied to the right-hand side, it follows that
ˆ
θ ∈ AsN
s
(θ, I(θ)
−1
).
In summary, we have three different expressions,
U(θ)
t
I(θ)
−1
U(θ), (
ˆ
θ − θ)
t
I(θ)(
ˆ
θ − θ), 2(ln L(
ˆ
θ) − ln L(θ)),
all of which define (approximate) confidence functions if we apply the CDF χ
s
(x)tothe
expression but replace the estimator
ˆ
θ by the maximum likelihood estimate θ
∗
. Often we also
replace the matrix function I(θ) by the observed matrix −U
(θ
∗
) in the first two expressions
here. The last expression defines a test which is referred to as the likelihood ratio test.
So far we have assumed that we are analyzing the correct model, but if we combine the
discussion here with that in the previous section, we can also use the score equation as an
estimating tool when the model is not correct, as long as we mitigate the misspecification by
using the robust variance estimate instead of the model-derived one. This makes the analysis
less precise, compared to if the model had been correct, but there must be a price to pay for
using the wrong model. As an example, suppose that we want to do a classical ANOVA on