Kosevich A.M. The crystal lattice
Подождите немного. Документ загружается.

232
9 Point Defects
varying at distances that greatly exceed the average distance between the defects. Then
we calculate the mean field of all images of the defects multiplyin g (9.5 . 15) by th e
number of defects in a specimen and disregarding surface effects
ε
im
ll
=
4π
3
R
3
nε
1
ll
= πγ
4G
3K
Ω
0
n, (9.5.17)
where n is the number of dilatation centers in a unit volume.
We see that although in an unbounded crystal the dilatation centers do not generate
relative volume change in the elastic medium between defects, in a finite-dimension
specimen there always exists a finite dilatation (Ω
0
> 0) or compression (Ω
0
< 0)
proportional to the defect concentration. However, since the result (9.5.17) is inde-
pendent of the specimen dimension R, it should also remain valid in the limit R → ∞
for n = constant.
9.5.1
Problem
1. Find the hydrostatic compression of an isotropic medium around an elastic dipole
with a unit vector l of its axis.
Solution.
ε
kk
≡ div u(r)=−
Ω
0
4π
l
i
l
k
∇
i
∇
k
1
r
, r = 0.
10
Linear Crystal Defects
10.1
Dislocations
Dislocations are linear defects in a crystal near which the regular atomic arrangement
is broken. In a theoretical treatment, dislocations in real crystals perform as important
a role as electrons do in metals.
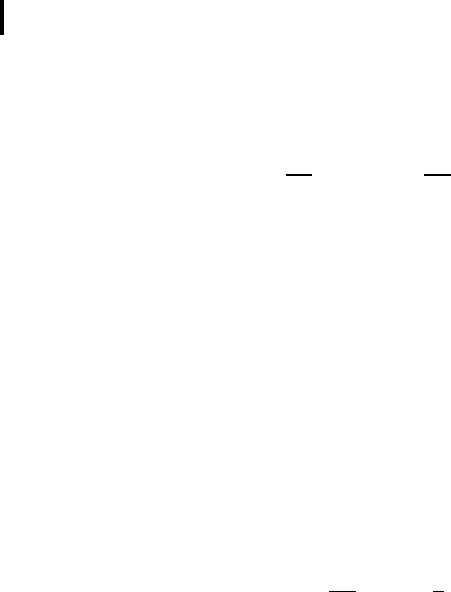
There are many microscopic models of dislocations. In the simplest model the
dislocation is taken to be the edge of an “extra” half-plane present in the crystal lattice.
In the conventional atomic scheme of this model where the trace of the half-plane
coincides with the upper semiaxis Oy (Fig. 10.1), the edge of the extra half-plane on
the z-axis, is called an edge dislocation. The regular crystal structure is then greatly
distorted only in the near vicinity of th e isolated line (the dislocation axis) and the
region of irregular atomic arrangement has transverse dimensions of the order of a
lattice constant. If we surround the dislocation with a tube of radius of the order of
several interatomic distances, the crystal outside this tube may be regarded as ideal and
subject only to elastic deformations (the crystal planes are connected to one another
almost regularly) and inside the tube the atoms are considerably displaced relative to
their equilibrium positions and form the dislocation core. In Fig. 10.1 the atoms of
the dislocation core are distributed over the contour of the shaded pentagon.
Nevertheless, deformation even occurs far from the dislocation. The deformation at
a distance from the dislocation axis may be seen by tracing a path in the plane xOy
(Fig. 10.1) through the lattice sites along the closed contour around the dislocation
core. We consider the displacement vector o f each site from its position in an ideal
lattice and find the total increment of this vector in the path. We go around the dislo-
cation axis along the external contour starting from the upper left angle (atom 1) and
see that the atomic displacement at the end of the path is nonzero and equal to one
lattice period along the x-axis. This singularity of the dislocation deformation can be
considered as the initial one when we define a dislocation in a crystal.
The Crystal Lattice: Phonons, Solitons, Dislocations, Superlattices, Second Edition. Arnold M. Kosevich
Copyright
c
2005 WILEY-VCH Verlag GmbH & Co. KGaA, Weinheim
ISBN: 3-527-40508-9
234
10 Linear Crystal Defects
Fig. 10.1 A scheme of atomic arrangement in the vicinity of an edge
dislocation.
We denote the vector connecting atoms 1 and 2 by b. This vector is called the Burg-
ers vector of a dislocation. The possible values of the Burgers vectors in an anisotropic
solid are determined by its crystallographic structure and correspond, as a rule, to a
small number of certain directions in a crystal. The dislocation lines are arranged
arbitrarily, although their arrangement is limited by a set of definite crystallographic
planes.
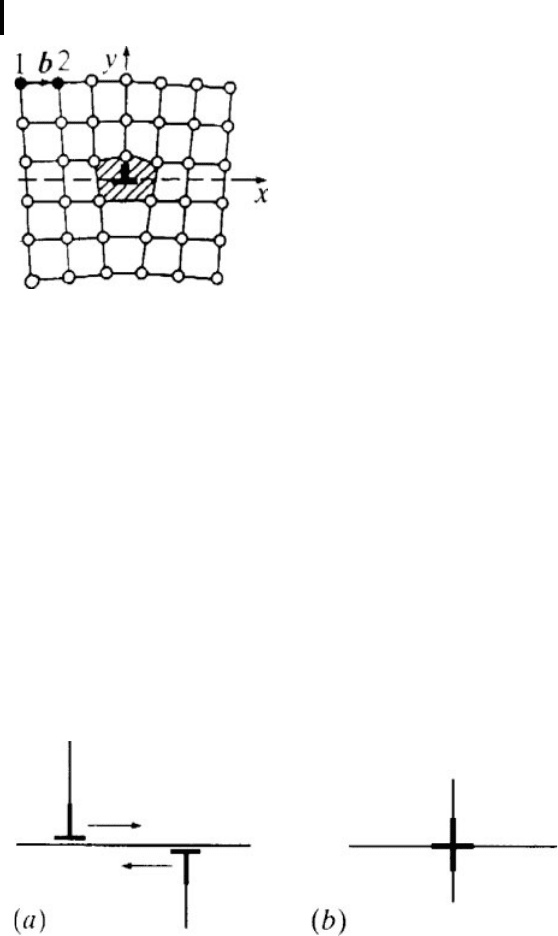
Let τ be the unit vector of a tangent to the dislocation line. For an edge dislocation
τ ⊥ b. Edge dislocations with opposite directions of b differ in that the “extra” crys-
tal half-plane lies above an d below the xOz plane (Fig. 10.2a). If dislocations such as
1 and 2 are observed in a crystal simultaneously, they are called opposite-sign dislo-
cations (for instance, the first one may be called a positive edge dislocation). When
opposite-sign dislocations merge, annihilation takes place, resulting in the elimination
of two defects and in a “reunification” of the regular atomic plane.
Fig. 10.2 Annihilation of edge dislocations: (
a
) two dislocation of op-
posite signs; (
b
) reproduction of an atomic plane after the dislocations
merge.
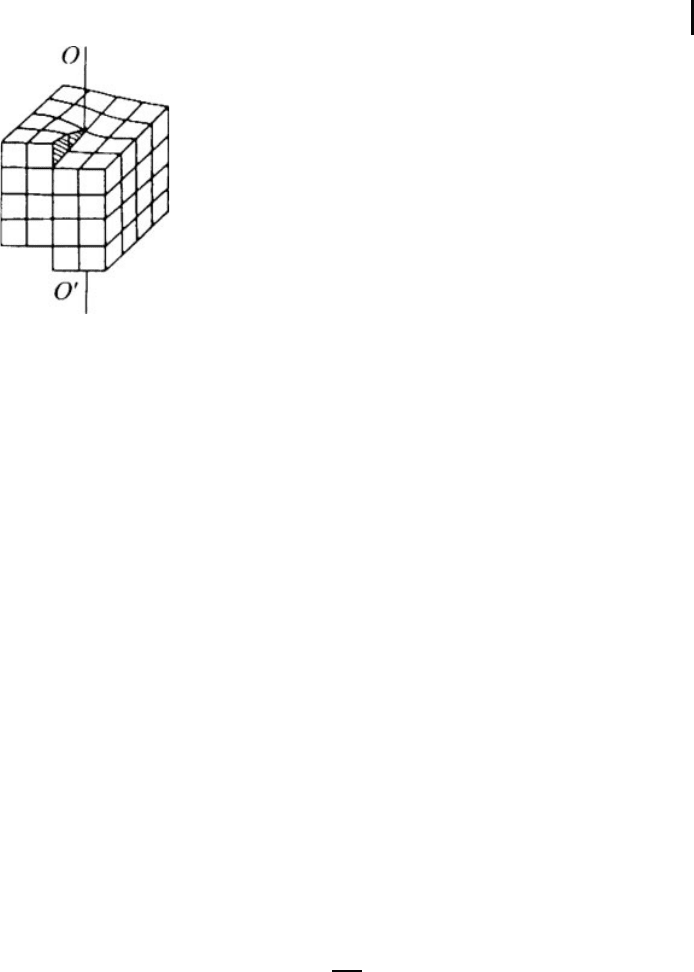
When τ b the corresponding dislocation is called a screw dislocation. The pres-
ence of a linear screw dislocation in a crystal converts the lattice planes into a heli-
coidal surface similar to a spiral staircase. Figure 10.3 shows a scheme of atomic-plane
arrang ement in the presence of a screw dislocation coinciding with the OO
line.
10.2 Dislocations in Elasticity Theory
235
Fig. 10.3 Screw dislocation in a crystal.
If the dislocation line is not perpendicular and not parallel to the Burgers vector, it
is called a segment of mixed type. Dislocation segments of an edge, screw and mixed
type can arrange themselves continuously along a line forming a dislocation line. The
dislocation line cannot end inside a crystal. It must either leave the crystal with each
end at the crystal surface or (as is generally observed in real cases) form a closed
dislocation loop. It is clear that the Burgers vector is constant alon g the d islocation
line.
A crystal lattice with dislocations will sometimes be called a dislocated lattice (or
a dislocated crystal).
10.2
Dislocations in Elasticity Theory
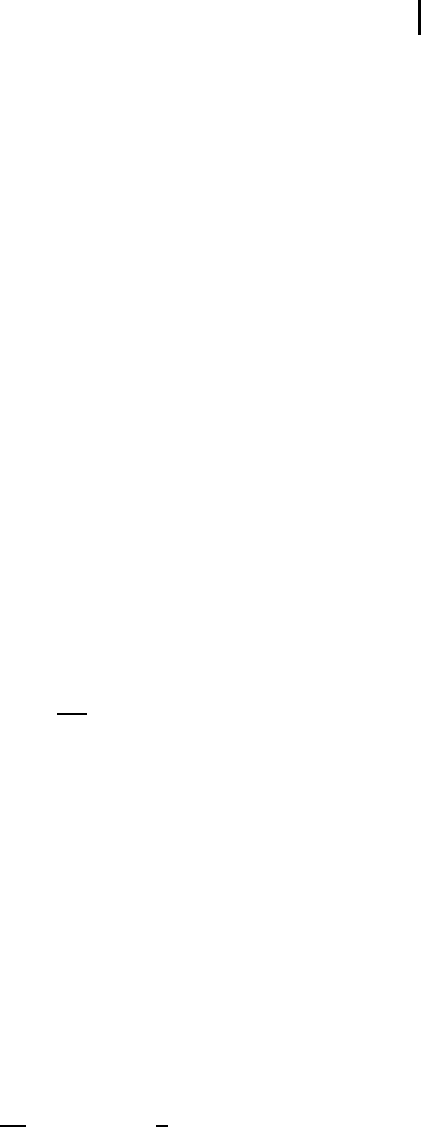
The main property o f a dislocation implies that when a circuit is made around the
dislocation line the total increment of the elastic displacement vector is nonzero and
equal to the Burgers vector. Thus, a dislocation in a crystal will be said to be a specific
line D having the following general property: after a circuit around the closed contour
L enclosing the line D (Fig. 10.4) the elastic displacement vector u changes by a
certain finite increment b equal (in value and direction) to one of the lattice periods.
This property is written as
L
du
i
=
L
∂u
i
∂x
k
dl
k
= −b
i
, (10.2.1)
assuming that the direction of the circuit is related by the corkscrew rule with a chosen
direction of the tangent vector τ to the dislocation line. The dislo cation line is in this
case a line of singular points of the fields of strains and stresses
1
.
1) We do not consider the dislocation line as a local inhomogeneity of a crystal.

236
10 Linear Crystal Defects
Fig. 10.4 Mutual orientations of the vector n and τ.
The majority of the essential physical properties of dislocations is not connected
with microscopic models and can be described phenomenologically in the framework
of elasticity theory using a similar definition.
From a mathematical point view, the condition (10.2.1) means that in the presence
of a dislocation the displacement vector is a many-valued function of the coordinates
that receives an increment in a passage around the dislocation line. In this case there is
no physical ambiguity: the increment b denotes an additional displacement of crystal
atoms by one lattice period that, due to the translational invariance, does not change
its state. In particular, the stress tensor σ
ik
characterizing the elastic crystal state is a
single-valued and continuous function of the coordinates.
In a crystal with a separate dislocation, instead of many-valued function u(r),we
can regard the displacement vector u as a single-valued function that undergoes a fixed
jump b on some arbitrary chosen surface S
D
spanning the dislocation loop D:
δu ≡ u
+
− u
−
= b, (10.2.2)
where u
+
and u
−
are the u(r) values from the upper and lower sides of the surface
S
D
, respectively. The “upward” direction (positive) is determined by the direction of a
normal n to the surface S
D
(this direction is connected by the corkscrew rule with the
τ-vector direction, Fig. 10.4). If the jump δu is the same at all points of the S
D
surface
the distortion tensor u
ik
is a continuous and differentiable function on this surface.
Using (10.2.2) we can formally give another definition of a dislocation, namely, by
defining it as the line D on which the surface S
D
with given jump (10.2.2) of the vector
u(r) is spanned. In some cases this definition is more convenient than the initial one,
e. g., using it we can easily find the field around the dislocation. If we calculate the
strain tensor for a crystal with a dislocation, i. e., in the presence of the jump (10.2.2)
on the S
D
surface, it will have on this surface a δ-like singularity
(S)
ik
=
1
2
(n
i
b
k
+ n
k
b
i
)δ(ζ), (10.2.3)
where ζ is the coordinate along the normal n.Thevalueζ = 0 corresponds to the S
D
surface.
10.2 Dislocations in Elasticity Theory
237
As there is no physical singularity in the space near a dislocation the stress tensor
σ
ik
as noted above should be a continuous function everywhere. Meanwhile, the stress
tensor σ
(S)
ik
= λ
iklm
(S)
lm
having a singularity on the surface S
D
is formally associated
with the strain tensor (10.2.3). To eliminate this stress tensor, it is necessary to define
the function’s body forces distributed over the surface S
D
with a specially chosen
density f
(S)
:
f
(S)
i
= −∇
k
σ
(S)
ki
= −λ
iklm
∇
k
(S)
lm
. (10.2.4)
Thus, the problem of finding a many-valued function u(r) is equivalent to that
of finding a single-valued but discontinuous function in the presence of body forces
(10.2.3), (10.2.4). Substituting (10.2. 4) into (9.5.1) and performing the integration we
obtain
u
i
(r)=−λ
iklm
b
m
S
D
n
l
∇
k
G
ij
(r − r
) dS
. (10.2.5)
In principle, (10.2.5) allows one to obtain elastic displacements in a crystal when
the form of the dislocation loop is arbitrary. The general formula (10.2.5), however, is
complicated and the calculation of a displacement field even with simple dislocation
line shapes is quite cumbersome. In the case of a straight-lin e dislocation, when we
deal with the plane problem of elasticity theory, it is simpler to solve a n equilibrium
equation under the condition (10.2.1).
Studying the lattice dynamics, we used a scalar model to simplify the calculations.
To the same aim we clarify to what the dislocation-type linear defect corresponds in a
scalar elastic field model.
Let b characterize the linear defect intensity of a scalar field u and the defect itself
is defined by
L
du =
L
∂u
∂x
k
dx
k
= −b, (10.2.6)
which plays the role of a boundary condition for the field equation (2.9.21). In a static
case, (2.9.21) reduces to the Laplace equation
∆u = 0. (10.2.7)
If we introduce the vector h = grad u as a c haracteristic of the field state then
the fixed circulation of this vector along any closed contour enclosing the defect line
will be determined by (10.2.6). A similar defect is a vortex of the field h. Thus, a
dislocation in an elastic field is an analog of a vortex of some scalar field.
It follows from (10.2.6), (10.2.7) that the dislocation field in a scalar model coin-
cides with the vortex field in a liquid up to the notations.
In particular, a rectangular vortex perpendicular to the plane xO y and a dislocation
in a scalar model have potential field
u =
b
2π
θ,tanθ =
y
x
. (10.2.8)

238
10 Linear Crystal Defects
The field (10.2.8) generates the vector field h
h
x
=
b
2π
y
r
, h
y
= −
b
2π
x
r
, r
2
= x
2
+ y
2
. (10.2.9)
Since a screw dislocation with Burgers vector b parallel to the Oz-axis in an
isotropic medium is a singularity of the scalar field, u
z
and its displacement field
are u
x
= u
y
= 0, u
z
= u, where the function u is given by (10.2.8).
10.3
Glide and Climb of a Dislocation
The definition of a dislocation (10.2.2) is a formal tool allowing us to solve some static
elasticity problems in a medium with dislocations. If we associate the vector u(r)
having a discontinuity (10.2.2) with real atomic displacements in a crystal and try
to reproduce the real process of dislocation generation (via relative displacements of
atomic layers on both sides of the surface S
D
by the value b), we run into certain diffi-
culties of a physical character. Indeed, when the condition (10.2.2) was formulated we
supposed that crystal continuity is conserved along the surface S
D
. In particular, the
interatomic distances remain unchang e d (up to elastic deformations). However, when
(10.2.2) is understood formally it is clear that crystal continuity is violated. In fact,
when the cut boundaries are displaced by b the crystal volume changes inelastically
δV = nbδS, (10.3.1)
per each element δS of a discontinuity surface. Therefore, the condition (10.2.2) im-
plies that we “eject” the material where the atomic layers overlap under displacement
and fill in the remaining “gaps” with additional material. However, a crystal has no
mechanisms of automatic removal or supply of material in a solid. Thus, a purely
mechanical way of dislocation generation through displacement of the atomic layers
along an arbitrary surface S
D
without discontinuities appearing in physical quantities
is impossible.
However, it follows from (10.3.1) that in a crystal there exists a specified surface
S
sl
at each point of which nb = 0 and the displacement described is shear-like with
no effect on the crystal continuity. It is clear that it is a cylindrical surface whose
elements are parallel to the vector b and its directrix is a dislocation loop. It is called
a slip surface of the dislocation concerne d and is an envelope of the family of slip
planes of all dislo cation line elements. By the slip plane of a dislocation element we
understand a surface tangent to the corresponding element of the dislocation line and
this plane is determined by the vectors τ and b. Possible systems of slip planes in an
anisotropic medium are determined by the structure of a corresponding crystal lattice.
A slip plane is singled out physically because a dislocation-induced shift is possi-
ble along it (the interatomic distances in the vicinity of a slip plane surface remain
10.3 Glide and Climb of a Dislocation
239
unchanged after a shift). A comparatively easy mechanical displacement of the dislo-
cation is possible in this plane. The latter follows directly from a microscopic picture
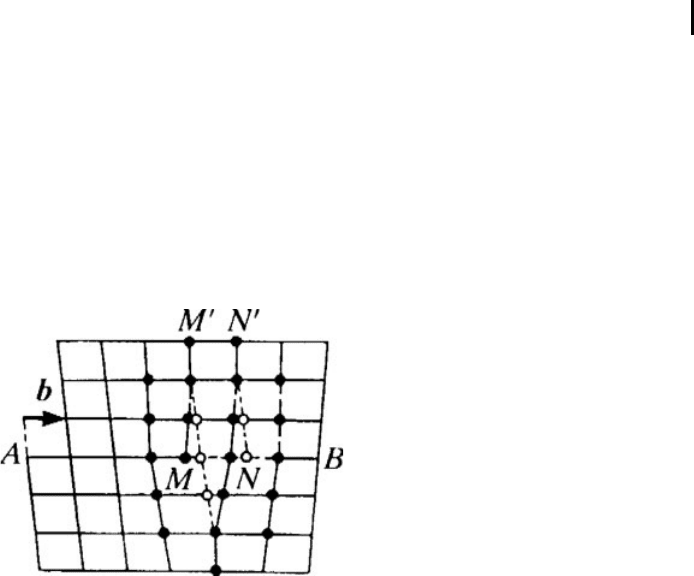
of the dislocation defect and is demonstrated by means of a scheme with an extra half-
plane (Fig. 10.5). Let an edge dislocation be generated by a shift b along a slip plane
whose trace in Fig. 10.5 coincides with a crystallographic direction AB. We consider
two atomic configurations near th e dislocation core when an extra atomic half-plane is
in the position MM
(atoms are marked with black circles) and also when the role of
an extra crystal half-plane is p layed by the atomic layer occupying the position NN
(atoms are shown with light circles).
Fig. 10.5 A scheme of atomic-layer rearrangement with the edge dislo-
cation gliding.
Although the transition from the first atomic configuration to the second one is con-
nected with the d islocation migrating one interatomic distance to the right in the slip
plane, the displacements of individual atoms are small compared to the value of b.
This means that such collective atomic rearrangements that provide a dislocation mi-
gration may be realized under the action of comparatively small forces. If we compare
such forces with macroscopic loads, it turns out that the corresponding shear stresses
σ
s
necessary to initiate dislo cation motion are less by a factor of 10
2
− 10
4
than the
shear modulus of a monocrystal G. The smallness of the parameter σ
s
/G is a crucial
physical factor that allows us to use linear elasticity theory to describe the mechanical
processes accompanied by the motion of dislocations. Thus, a dislocation may move
comparatively easily in its own slip plane. This motion of a dislocation is generally
called sliding or gliding,orjustglide. Finally, it is often called a conservative motion.
A simple mathematical model allows us to understand certain features of the dislo-
cation dynamics and to explain qualitatively the high mobility of the dislocations.
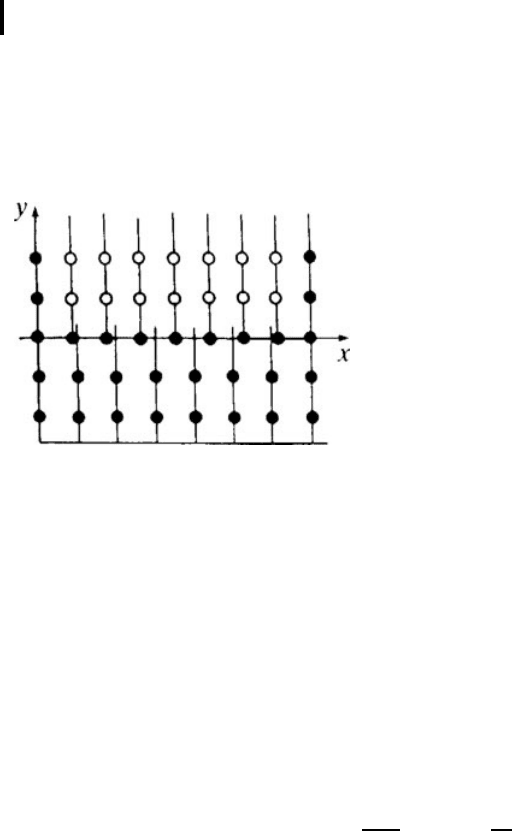
Let us imagine that a chain of atoms (Fig. 1.11) is an edge series of one half of
a plane crystal (y > 0, Fig. 10.6) displaced in a certain way with respect to another
half of a crystal (y < 0, Fig. 10.6). Then the influence of the nondisplaced half of a
crystal on the atoms distributed along the x-axis can be qualitatively described using
the energy (1.6.4).
240
10 Linear Crystal Defects
Crystallographic atomic rows with an extra half of the atomic row (Fig. 10.6) above
the x-axis represent a model of the dislocation in a crystal. Thus, the scheme described
may be an analog of the problem of dislocations in a two-dimensional and three-
dimensional crystal. Such an interpretation of this model was performed by its authors
(Frenkel and Kontorova, 1938).
Fig. 10.6 Edge dislocation in the Frenkel–Kontorova model.
We remind ourselves of an important result obtained in analyzing the crowdion
dynamics (Section 9.4). In the continuum approximation (a crystal is considered as a
continuous elastic medium) the crowdion energy is independent of the coordinate of
its center, and thus the crowdion m ay move freely along a 1D crystal. A dislocation
has the same property.
However, if we take into account the discreteness of the crystal, a resistance force
arises that must be overcome to start the motion of either a crowdion or of a dislo ca-
tion, i. e., a starting stress σ
s
appears.
We estimate it from (9.4.7) determining the crystal energy dependent on a crow-
dion coordinate. The derivative of this energy with respect to the crowdion center
coordinate x
0
yields the force
f = −16 πα
0
a exp
−
π
2
l
0
a
sin
2π
x
0
a
,
where l
0
is the crowdion width; a is the interatomic distance (l
0
a). This force
exists by virtue of the lattice discreteness (a = 0) and is exponentially small with
respect to the parameter l
0
/a determining the degree of macroscopicity of a crowdion
core.
Extending the results obtained in a 1D model to the case o f a linear dislocation in
a 3D crystal, it is p ossible to expect that they are valid as qualitative statements. The
latter makes it possible to explain the smallness of a starting stress of the dislocation
by the macroscopicity of its core and understand why glide is comparatively easy.
Quite a different physical nature is inherent to the real migration of a dislocation
in a direction perpendicular to the slip plane. We con sid er an arbitrarily small dis-
placement δX of an element of the dislocation loop length dl , assuming δX to have

10.4 Disclinations
241
a component normal to the slip surface. Such a migration of a dislocation element
results in the su rface area S
D
increasing by the crystal volume, a value that may be
characterized by an axial vector δS =[δXτ]dl.
As a result, the crystal volume exhib its an inelastic local increase that, from
(10.3.1), is equal to
δV = bδS = b[δXτ] dl = −[bτ]δX dl . (10.3.2)
If δV = 0, then the deficiency (δV > 0)orexcess(δV < 0) of material cannot be
balanced in the ideal crystal volume in a mechanical way (if continuity is conserved).
However, in a real crystal a slow-acting mechanism of condensation or rarefaction of
a substance exists, requiring no macroscopic breaks of continuity. We are referring
to the processes of formation and diffusion migration of point defects: atoms in the
interstices (the material condensed) and vacant sites (the material rarefied). Thus, an
inelastic increase in the volume (10.3.2) on the dislocation axis should be compensated
by an equal decrease in the crystal volume due to the formation of a corresponding
number of point defects in the vicinity of a d islocation core. As each crystal site is
associated with unit cell volume V
0
, the quantity (10.3.2) should be associated with
the number |δV|/V
0
arising from vacancies or vanishing interstitial atoms. However,
since point defects of both types may vanish or be generated, the change in their
number is related to the displacement of the dislocation line element by
δN =
[bτ]
V
0
δX dl , (10.3.3)
where δN is the difference in numbers of interstitial atoms and vacancies produced.
The point defects for which (10.3.3) is written appear or vanish just near the dislo-
cation core. Therefore, in macroscopically describing the dislocation motion the total
variation in crystal volume can be concentrated at the dislocation line. Thus, the mi-
gration of a dislocation in a direction perpendicular to the slip plane is accompanied
by a local increase in crystal volume with a relative value given by
δ
0
kk
= δX[bτ]δ(ξ), (10.3.4)
where δ(ξ) is a 2D δ-function; ξ is a 2D radius vector in the p lane perpendicu lar to
the vector τ at a given point of the dislocation loop with its origin at the dislocation
axis.
Dislocation migration w ith a velocity limited by th e diffusion processes that pro-
vide changes in the volume (10.3.4) is called climb or nonconservative motion of a
dislocation.
10.4
Disclinations
The definition of a dislocation based on (10.2.2) reflects an important property of
deformation in a continuous medium. If the function u(r) exhibits a jump (10.2.2)