Kusse B.R., Westwig E.A. Mathematical Physics: Applied Mathematics for Scientists and Engineers
Подождите немного. Документ загружается.

76
INTRODUCTION TO TENSORS
The functions
x!
=
X~(X~,X~,X~)
relate the primed Cartesian coordinates to the
unprimed Cartesian coordinates.
To
help keep things straight, notice there is
a
pattern
to these transformation equations. Every time we convert from the unprimed system
to the primed system, whether we
are
dealing with a basis vector or the components
of
some vector, we sum over the
second
subscript
of
ai,.
In contrast, conversions
from the primed system to the unprimed system always sum over thefirst subscript.
4.3.4
Tensor
Transformations
To understand why the elements of a tensor must change values when expressed
in different coordinate systems, consider the conductivity tensor. If in one set of
coordinates, current flows more easily in the 1-direction than the 2-direction, then
u11
>
a22.
Observation
of
the same physical situation in
a
new, primed coordinate
system where the 1'-direction is equivalent to the original 2-direction and the
2'-
direction is the same
as
the original 1-direction, would show that
ui1
<
ui2.
Clearly
the elements of the conductivity tensor must take on different values in the two
systems, even though they
are
describing the same physical situation.
This
is also
true
of
a
vector quantity; the same velocity vector will have different components in
different coordinate systems.
Tensor transformations follow the same pattern as vector transformations.
A
vector
expressed in a primed and unprimed system is
still
the same vector:
Likewise, using the notation of Equation 4.19, the expressions for a second-rank
tensor in the two systems must obey
Herein lies the beauty of this notation. The relationship between the elements,
Ti,
and
T,$
is built into Equation
4.47
and is easily obtained by applying two successive
dot products to both sides. The first dot product yields
(4.48)
TRANSFORMATIONS
BETWEEN
COORDINATE
SYSTEMS
77
Applying a second dot product in the same manner yields
Tlm
=
T:sariasm.
(4.49)
To invert Equation
4.49
use the inverted matrix
[a]-'
twice and remember, for
orthonormal coordinate systems,
a[;'
=
aji.
This gives
Ti;
=
Trsalra,.
(4.50)
In general, tensor transformations require one
ai,
factor for each subscript in
the tensor. In other words, an
rth
rank tensor needs
r
different
aij
factors. If the
transformation goes from the unprimed
to
the primed system, all the
aij's
are summed
over their second subscript. For the inverse transformation, going from the primed to
the unprimed system, the sums are over the first subscript. Tensor transformations,
for arbitrary rank tensors, can be summarized as follows:
where the elements of the mamx
[a]
are given by Equation
4.35.
There is another important feature in the tensor notation of Equation
4.19.
Unlike
in a matrix equation where all terms must be in the same basis, the tensor/vector
notation allows equations to have mixed bases. Imagine the elements of
Ohm's
law
expressed in both a primed and unprimed coordinate system:
(4.5
1)
Ohm's law reads
-
_-
J=?F.E,
(4.52)
and any combination of the representations in Equations
4.51
can be used in the
evaluation. For example:
J1ef
=
(Ujkei@L)
'
(El&[)
=
UjkEI$I(@L
'
&)
=
U:kE@;Ukl.
(4.53)
The fact that elements
of
from the primed frame are combined with components
of
E
from the unprimed frame presents no problem. The dot product of the basis vectors
takes care of the mixed representations, as long as the order of the basis vectors
is
preserved. This is accomplished in Equation
4.53
by the fact that
2:
.
21
#
&.
This
type of an operation could not be performed using a matrix representation without
explicitly converting everything to the same basis.
The value of expressing a tensor in the form of
4.19
should now be clear. In addition
to handling the same algebraic manipulations as a matrix array, it also contains all
78
INTRODUCTION TO TENSORS
the information necessary to transform the elements from one coordinate system to
another. Thus a tensor is truly a coordinate-independent, geometric object, just
as
a
vector is.
4.4
TENSOR DIAGONALEATION
In
physics and engineering problems
we
often want to
diagonalize
a tensor. What
this
means is we want to find a particular coordinate system in which the matrix
array representation of a tensor has nonzero elements only along its diagonal.
A
rigid
body will experience no vibration when rotated around any of the
three
axes of a
coordinate system in which the moment of inertia tensor
is
diagonalized. The process
of balancing a wheel of an automobile makes use of
this
fact. Small, asymmetrically
placed weights are added to the
rim
until one of these special axes lies along the axle.
Many students get lost
in
the mathematical process of diagonalization and forget
that it is actually a transformation of coordinates.
In
this section, we derive the
elements of the transformation
matrix
[a]
that diagonalizes a given tensor. We start
off
with a completely theoretical treatment of the subject. Then two numerical examples,
one nondegenerate and one degenerate, are worked out in detail.
4.4.1
Diagonalization
and
the Eigenvalue Problem
Based on the discussion of the previous section, a tensor
system must
be
equivalent to the same tensor written
in
a primed system:
written
in
an unprimed
(4.54)
We are interested in a very special primed system, a system where all the off-diagonal
elements of
S
are zero. In
this
case, Equation 4.54 becomes
(4.55)
Both the tensor elements and the basis vectors
of
the unprimed system are presumed
to
be
known. The problem is to find
uis,
the elements of the tensor in the primed
system, and
&;,
the primed basis vectors, such that Equation 4.55 is satisfied.
To
do
this,
form
the dot product of Equation 4.55 with the fist primed basis vector
el
as
follows:
(4.56)
Equation 4.56 reveals an important property
of
the basis vectors of the system where
the tensor is diagonal. They do not change direction when dot multiplied by the tensor.
They can, however, change in magnitude.
If
we define
hl
=
mi1,
Equation 4.56
TENSOR DIAGONALIZATION
19
becomes
-
-
u
.
6;
=
Al@{.
(4.57)
The
A1
factor is called an
eigenvalue
of
?F.
An eigenvalue results when an operation
on
an
object produces a constant, the eigenvalue, times the original object. The primed
basis vector is called an
eigenvector.
Now, we introduce the special unit tensor
I,
which is defined as
-
-
1
=
a,.@.@.
‘I
1
J
(4.58)
so
that
-
--
1.V
=v.
(4.59)
-
Represented
as
a matrix,
T
is simply
- -
1+[1]=
0
1
0
.
(4.60)
[:
:]
Using the
7
tensor, Equation 4.57 can be rearranged to read
(2
-
Ali)
*
6;
=
0.
(4.61)
in the unprimed system, Equation 4.61 can be written
in
subscript
Expressing
notation as
Equation 4.29 and some rearrangement yields
@i(cr,j
-
A1Gij)alj
=
0,
(4.63)
where the
al
are
three
of
the unknown elements
of
the transformation matrix relating
the original coordinate systems to the one
in
which
The
LHS
of
Equation 4.63
is
a vector, and for it to be zero, each
of
its components
must be zero. Each component involves a sum over the index
j.
Equation 4.63
therefore becomes three equations which can
be
written in matrix array notation as
is diagonal.
u13
~22
-
AI
c23
]
[I!:]
=
[a]
.
(4.64)
g32
u33
-A1
In order for a set
of
linear, homogeneous equations such as those in Equation 4.64
to have a solution, the determinant
of
the coefficients must be zero:
80
INTRODUCTION TO TENSORS
g11
-
A1
u12
a21 ~22
-
A1
u13
g23
I
=
0.
(4.65)
1
a31
a32 u33
-
A1
det
This results in a third-order equation for
A1
which will generate three eigenvalues.
Select one of these values, it does not matter which one because the other two will be
used later, and call it
A].
Inserting
this
value into Equation
4.64
allows a solution for
all, a12,
and
a13
to within an arbitrary constant. These
are
three
of the elements
of
the transformation matrix between the primed and unprimed systems that we seek.
These
three
elements also allow the determination of the
6;
basis vector to within an
arbitrary constant:
e;
=
alje,.
A
(4.66)
Requiring
@[
to
be
a unit vector determines the arbitrary constant associated with
all,
a12
and
~13:
(ad2
+
(a12I2
+
(d2
=
1.
(4.67)
Except for an overall arbitrary sign and the degenerate situation discussed below, we
have now uniquely determined
6;.
The other primed basis vectors and elements of the transformation matrix are
obtained
in
a similar way. The second primed basis vector is determined by forming
the dot product in Equation 4.56 using
6;.
A
matrix equation equivalent
to
4.64
is
written with
A2,
a21,
az2,
and
~23.
The
resulting determinant equation for
A2
is
identical to the one for
Al,
in Equation 4.65. One of the two remaining eigenvalues
of this equation is selected for
A2
and used to determine
a21, a22, a23,
and
$4.
In
a
similar way, the last eigenvalue of Equation 4.65 is used for
A3
to determine
~31,
~32,
is diagonal,
is
defined by the basis
vectors
6;,
64,
and
$:.
The elements
of
??in
this
primed system are just the eigenvalues
determined from Equation 4.65,
~33,
and
$4.
The primed coordinate system, in which
0
0
A3
(4.68)
The matrices of interest in physics and engineering are typically
Hermitian.
If
we allow the possibility
for
complex matrix elements, a matrix
is
Hermitian if it is
equal to its complex conjugate transpose. That is,
%j
=
eF.
There are two important
properties of Hermitian matrices. First, their eigenvalues are always pure real num-
bers. Second, their eigenvectors
are
always orthogonal.
Proofs of
these statements
are left as exercises at the end of
this
chapter.
The only complication that can arise in the above diagonalization process is
a
degenerate situation that occurs when two or more of
the
eigenvalues are identical.
Consider the case when
Al
#
A2
=
A3.
The unique eigenvalue
Al
determines
all,
TENSOR
DIAGONALIZATION
81
a12,
a13
and the eigenvector
e;,
just as before. The degenerate eigenvalues, however,
will not uniquely specify their eigenvectors. These eigenvectors may be chosen an
infinite number
of
ways. An example with
this
type of degeneracy
is
discussed in one
of the examples that follows.
~~ ~ ~~ ~ ~
Example
4.1
tivity tensor expressed
in
Cartesian coordinates:
As
an example of the diagonalization process, consider the conduc-
Let this tensor have the matrix representation (ignoring units)
10 0
1 10
(4.70)
This matrix is Hermitian,
so
we can expect to find pure real eigenvalues and orthog-
onal eigenvectors. The eigenvalues for the diagonalization
are
generated from the
determinant equation
10-A 0
0 10-A
;
I
=O.
(4.7
1)
1
10
-
h
der
Expansion of the determinant gives the third-order polynomial equation
(10
-
A)
[(lo
-
h)2
-
11
=
0,
(4.72)
which has three distinct roots:
Al
=
9,
A2
=
11,
and
A3
=
10.
to obtain
The elements
of
al
are determined by inserting the value of
A1
into Equation 4.64
(4.73)
This equation requires
aI2
=
-a13
and
all
=
0.
Thenormalization condition imposes
the additional constraint that
(~12)~
+
(~13)~
=
1
and results in
a13
The first eigenvector associated with the primed system becomes
(4.74)
82
INTRODUCTION TO TENSORS
The other components of
[a]
can be determined by performing similar calculations
to give
hz
and
h3.
The complete transformation matrix is
[a]
=
-
[:
:
q.
&&oo
(4.76)
The other two primed eigenvectors are
6;
=
(1/&)6*
+
(1/&)6,
(4.77)
and
$4
=
6,.
(4.78)
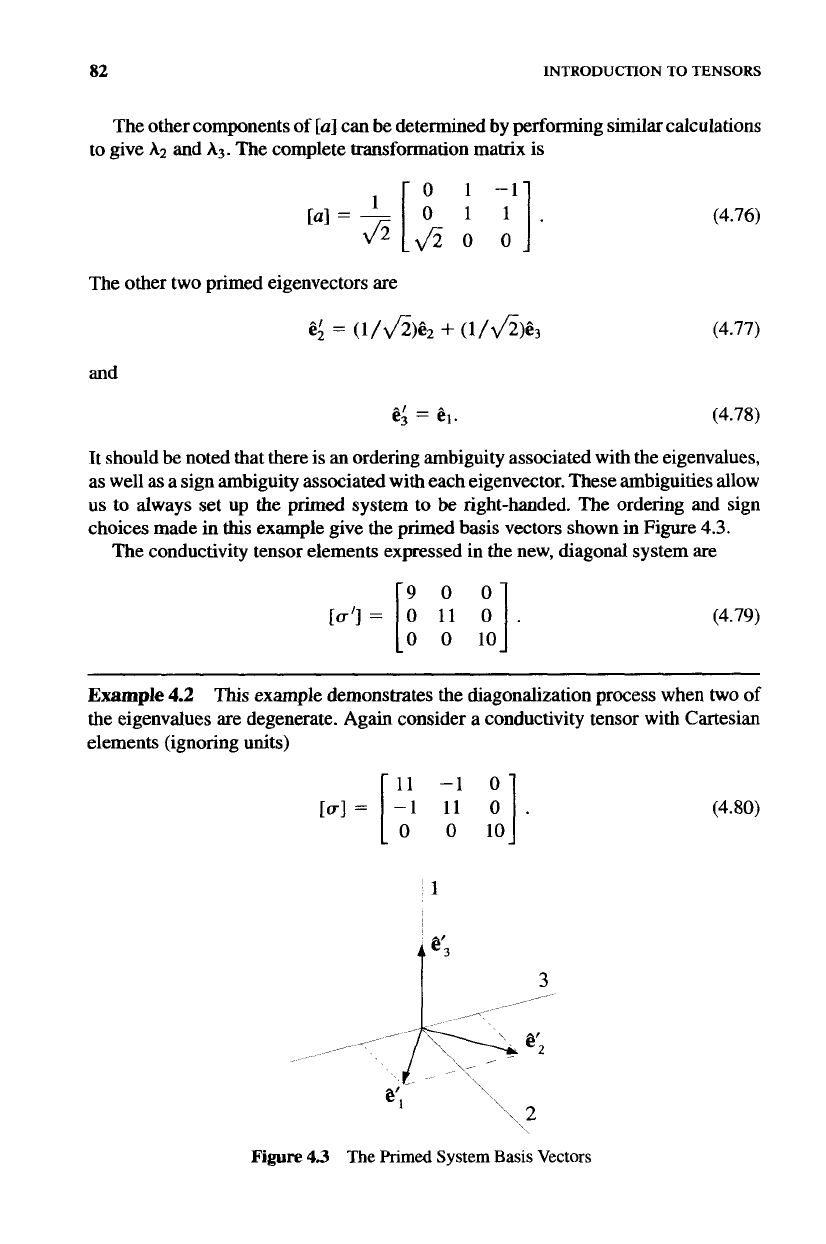
It
should
be
noted that there is an ordering ambiguity associated with the eigenvalues,
as well
as
a sign ambiguity associated with each eigenvector. These ambiguities allow
us
to
always set up the primed system
to
be
right-handed. The ordering and sign
choices made
in
this
example give the primed basis vectors shown in Figure
4.3.
The conductivity tensor elements expressed in the new, diagonal system are
[d]
=
0
11
0
.
[:
:
:]
(4.79)
Example
4.2
This
example demonstrates the diagonalization process when two
of
the eigenvalues are degenerate. Again consider
a
conductivity tensor with Cartesian
elements (ignoring units)
-1
0
[a]
=
[
;1
'd
pol.
(4.80)
Figure
4.3
The Primed System
Basis
Vectors
TENSOR DIAGONALIZATION
83
This is a Hermitian matrix and
so
we expect pure real eigenvalues and orthogonal
eigenvectors. The determinant condition is
-1 11-A
1
=0,
(4.81)
11-A
-1
0
10
-
A
det
which leads to the third-order polynomial equation
(10
-
A)
[(ll
-
A)2
-
11
.
(4.82)
This
third-order equation has three roots, but only two are distinct,
A1
=
12 and
A2
=
A3
=
10. The
A,
root can be treated as before. When substituted into Equation
4.64, the matrix relation becomes
(4.83)
This, when coupled with the normalization condition, gives
(4.84)
These elements
of
the transformation matrix define the first eigenvector
c;
=
(l/JZ)Cl
-
(1/&)@2.
(4.85)
Now consider the degenerate eigenvalue. When
A2
=
10
is substituted into Equa-
tion 4.64 we obtain
Substitution
of
A3
gives almost the same equation:
(4.86)
(4.87)
Equation
4.86
requires
a21
=
u22,
but gives no constraint on
~23.
The normalization
condition forces the condition
uil
+
ui2
+
u:3
=
1.
These conditions can be satisfied
by many different eigenvectors. Since
a23
is arbitrary, set it equal
to
zero. Now if the
second eigenvector is to be orthogonal to
Ci,
we have
(4.88)
a4
INTRODUCTION
TO
TENSORS
This gives for the second eigenvector
6.:
=
(1/&)2,
+
(1/&2.
(4.89)
The eigenvector associated with
A3
is given by Equation 4.87 and has all the same
constraints as the
A2
eigenvector, namely,
a31
=
(132
and
a33
is arbitrary. If we want
the eigenvectors to be orthogonal, however,
6:
must be perpendicular to
C/,
and
$4.
The basis vectors
2;
and
are
both in the original 12-plane and
so,
if
C:
is to be
perpendicular to these two primed basis vectors, it must be along the 3-direction.
This gives
(4.90)
and
for
the third eigenvector
2;
=
23.
(4.91)
A
quick check will show that these three eigenvectors are orthonormal and define a
right-handed coordinate system in which the elements of the conductivity tensor are
diagonalized.
4.5
TENSOR TRANSFORMATIONS
IN
CURVILINEAR
COORDINATE
SYSTEMS
The transformations of the previous sections easily generalize to curvilinear coordi-
nate systems. First consider the intermediate problem
of
a transformation between a
Cartesian and a curvilinear system.
Let the Cartesian system have primed coordinates
(xi,
x;,
x;)
and basis vectors
(Ci,
Ci,
Ci),
while the unprimed, curvilinear system has coordinates
(q1,qz.
q3),
basis
vectors
(ql,q2,$3),
and scale factors
(hl,h2,h3).
The set
of
equations relating the
coordinates
of
the two systems can be written as
=
x:(q1,
929
q3).
For example, the standard cylindrical system would use the equations
x/
=
-
XI
=
pcos8
x;
G
z'
=
2.
xi
=
y'
=
psin6
(4.92)
(4.93)
TENSOR TRANSFORMATIONS IN CURVILINEAR COORDINATE SYSTEMS
85
The transformation matrix
[a]
performs the same function as before. That is, it takes
the unprimed, curvilinear components
of
a vector and generates the primed, Cartesian
components:
V!
I
=
a..~.
'J
J'
(4.94)
Recall from the previous chapter that the displacement vector for the two systems
can be written
dr
=
=
h
I
.d
41%.
.A
(4.95)
The components
of
the displacement vector in the unprimed curvilinear system are
given by the
h,dq;,
while its components in the primed Cartesian system are given
by the
dxl.
These components must be related by the transformation matrix
[a].
In
subscript notation
&!
1
=
a..h.d
11
I
41.
.
(4.96)
The total differential
dx!
can be formed from Equations 4.92 and becomes
(4.97)
Equation 4.97 can be placed in the form of Equation 4.96 by multiplying the
RHS
of
4.97
by
hJ/h;:
Comparing Equations 4.98 and 4.96 gives
[Curvilinear
-+
Cartesian].
Jx:(q19
q29
q3)
hjaqi
a,,
=
(4.98)
(4.99)
The further generalization for the transformation between two curvilinear systems
follows
in
a straightforward way. The elements for the transformation matrix
[a]
in
this case become
(4.100)
Note there is no sum over
i
or
j
on the
RHS
of Equation 4.100 because both these
subscripts appear on the
LHS
of the expression.
Equation
4.100
is
the most general form
for
the elements of the transformation
matrix between two curvilinear coordinate systems. It simplifies to Equation 4.99 if
the primed system is Cartesian since the
hf
-+.
1.
It further degenerates to Equation
4.35
if
both the primed and unprimed systems are Cartesian since the
h,'
and the
h;
+
1.