Kusse B.R., Westwig E.A. Mathematical Physics: Applied Mathematics for Scientists and Engineers
Подождите немного. Документ загружается.

86
INTRODUCTION
TO
TENSORS
AXB=
As
before,
the
transformation matrix can also
be
determined from the basis vectors
of the two coordinate systems. For the general curvilinear case, the elements of
[a]
are
a..
1J
=
(q;
.
qj).
(4.101)
The above manipulations
are
fast and easy using subscript notation. It might be a
useful exercise to go through the same steps using
just
matrices
to
convince yourself
the subscript notation is more efficient.
e,
$2
$3
A,
0
0
0
B,
0
4.6
PSEUDO-OBJECTS
If
we consider only transformations that involve rigid rotations or translations, there
is no way to change a right-handed system into a left-handed system, or vice-versa.
To change handedness requires a reflection. Transformations that involve reflections
require the introduction
of
the so-called “pseudo”-objects. Pseudoscalars, pseudo-
vectors, and pseudotensors
are
very similar to their “regular” counterparts, except
for their behavior when reflected.
An
easy way to demonstrate the distinction is
by closely examining the cross product
of
two regular vectors in right-handed and
left-handed systems. Another way that emphasizes the reflection properties of the
transformation is the mirror test, which
is
presented
in
Appendix E.
4.6.1
Pseudovectors
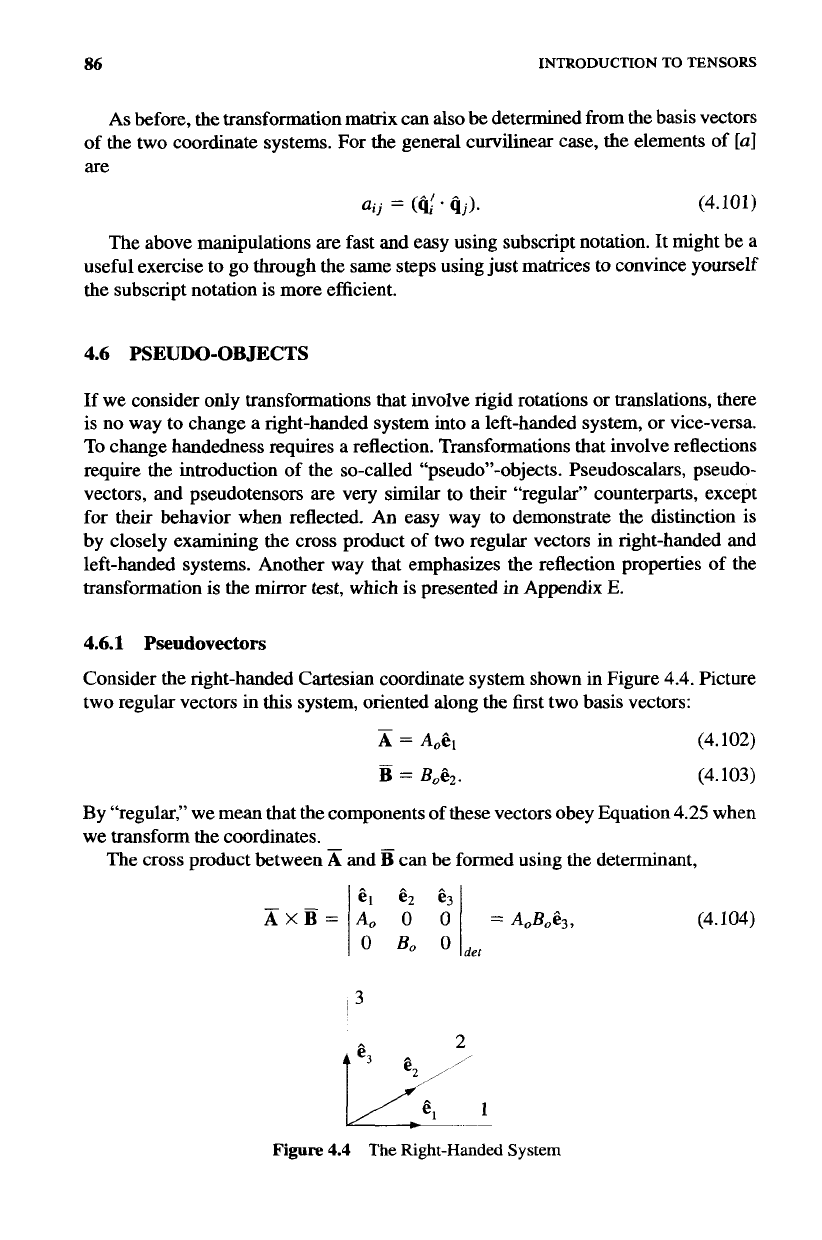
Consider the right-handed Cartesian coordinate system shown in Figure 4.4. Picture
two regular vectors in
this
system, oriented along the first two basis vectors:
(4.102)
(4.103)
By “regular,” we mean that the components of these vectors obey Equation 4.25 when
we transform the coordinates.
The cross product between
and can be formed using the determinant,
=
A,B,&,
(4.104)
iet
Figure
4.4
The Right-Handed System
PSEUDO-OBJECTS
87
3
2
AxB
t
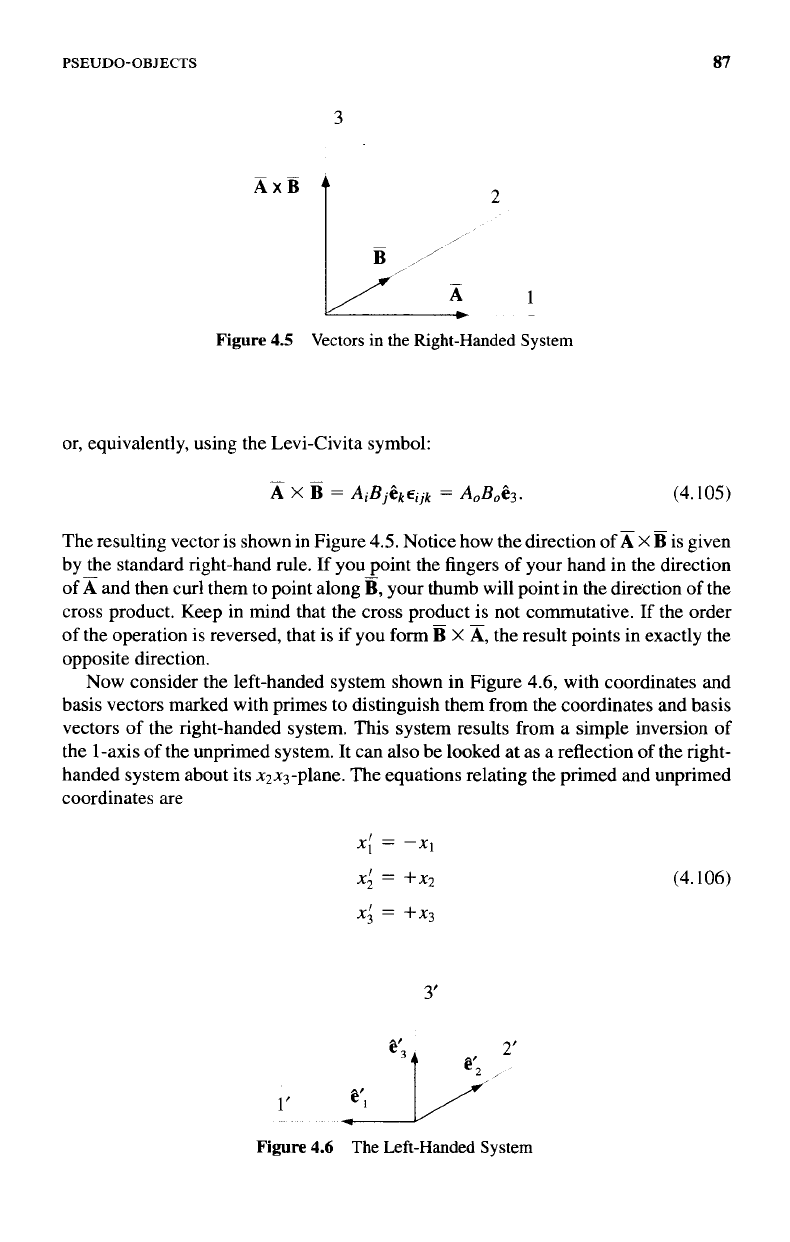
Figure
4.5
Vectors
in
the Right-Handed System
or, equivalently, using the Levi-Civita symbol:
(4.105)
The resulting vector is shown in Figure 4.5. Notice how the direction of
X
B
is given
by the standard right-hand rule.
If
you point the fingers of your hand in the direction
of
x
and then curl them to point along
B,
your thumb will point in the direction of the
cross product. Keep in mind that the cross product is not commutative.
If
the order
of the operation is reversed, that is
if
you form
B
X
A,
the result points in exactly the
opposite direction.
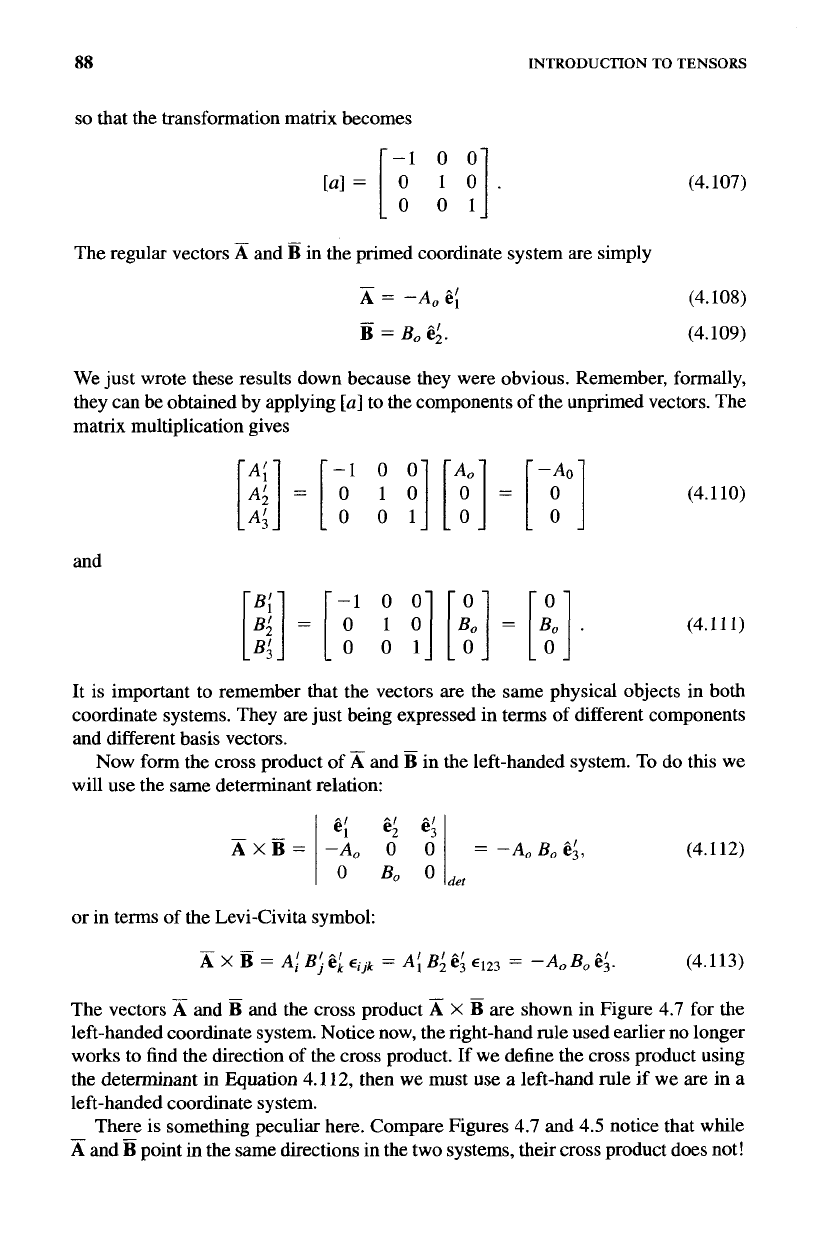
Now consider the left-handed system shown in Figure 4.6, with coordinates and
basis vectors marked with primes to distinguish them from the coordinates and basis
vectors of the right-handed system. This system results from a simple inversion
of
the I-axis of the unprimed system. It can
also
be
looked at as a reflection
of
the right-
handed system about its x2x3-plane. The equations relating the primed and unprimed
coordinates are
(4.106)
3'
Figure
4.6
The
Left-Handed System
88
INTRODUCTION TO TENSORS
so
that the transformation matrix becomes
-1
0 0
0
01
[a]=
[
0
1
oj
The regular vectors
A
and
B
in the primed coordinate system are simply
=
-A,
6;
=
B,
6;.
(4.107)
(4.108)
(4.109)
We just wrote these results down because they were obvious. Remember, formally,
they can be obtained by applying
[a]
to the components of the unprimed vectors. The
matrix multiplication gives
(4.1
10)
0
01
and
-1
0
0
[:I]
=
[
0
1
01
[lJ
=
[;,I
0
01
It is important to remember that the vectors are the same physical objects in both
coordinate systems. They are just being expressed in terms
of
different components
and different basis vectors.
Now form the cross product of
A
and
B
in the left-handed system. To do this we
will use the same determinant relation:
(4.111)
6;
c;
6;
AXB=
-A,
0 0
=
-A,
B,C&,
(4.112)
I
O
B,
O
Let
or in terms of the Levi-Civita symbol:
A
X
B
=
A{
BI
6;
Eijk
=
A;
B;
6;
€123
=
-A,
B,
6:.
(4.113)
The vectors
A
and
B
and the cross product
X
B
are shown in Figure 4.7 for the
left-handed coordinate system. Notice now, the right-hand rule used earlier
no
longer
works to find the direction
of
the cross product.
If
we define the cross product using
the determinant in Equation 4.112, then we must use a left-hand rule if we are
in
a
left-handed coordinate system.
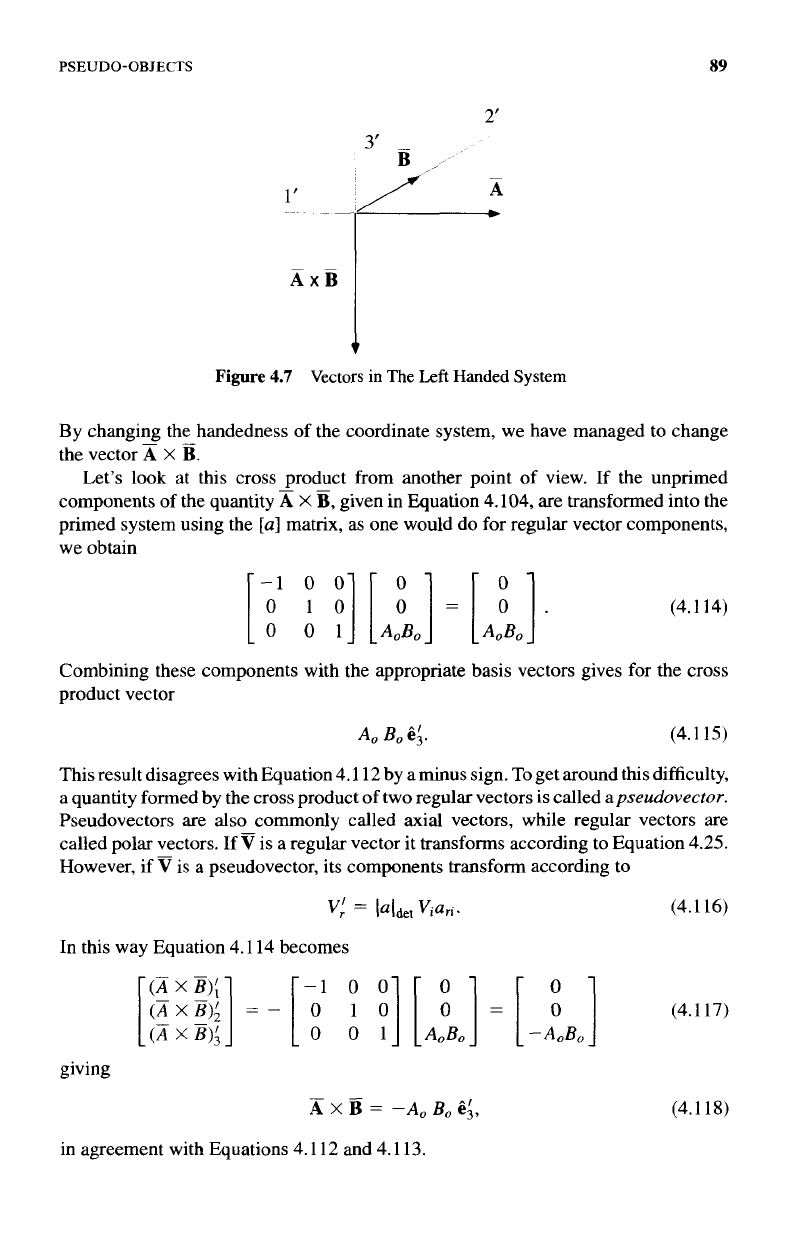
There is something peculiar here. Compare Figures 4.7 and 4.5 notice that while
A
and
B
point in the same directions in the two systems, their cross product does not!
-
PSEUDO-OBJECTS
2'
89
I
Figure
4.7
Vectors
in
The
Left
Handed System
By changing the handedness
of
the coordinate system, we have managed to change
the vector
X
B.
Let's look at this cross product from another point of view.
If
the unprimed
components of the quantity
X
B,
given in Equation 4.104, are transformed into the
primed system using the
[a]
matrix, as one would
do
for regular vector components,
we obtain
[
y]
[At,,]
=
[At,]
(4.1 14)
Combining these components with the appropriate basis vectors gives for the cross
product vector
-1
0
0
A,
B,
$4.
(4.1
15)
This result disagrees with Equation 4.1 12 by a
minus
sign.
To
get around this difficulty,
a quantity formed by the cross product of two regular vectors is called
apsedovector.
Pseudovectors are
also
commonly called axial vectors, while regular vectors are
called polar vectors. If
v
is a regular vector it transforms according to Equation 4.25.
However, if
v
is a pseudovector, its components transform according to
V:
=
bidet
Viari-
(4.1
16)
In this way Equation 4.1 14 becomes
(A
x
B);
-1
0
0
(A x
B);
0 0
1
A,B,
-
'43"
[(AXE1:]
=-
[
0
1
.]
[
:
]
=
[
:
]
giving
(4.117)
X
B
=
-A,
B,
$;,
(4.1 18)
in agreement with Equations 4.1 12 and 4.1 13.
90
INTRODUCTION
TO
TENSORS
To
summarize, if
v
is a regular vector its components transform as
v:
=
vi
a,i.
If instead it is a pseudovector, it components transform as
(4.1
19)
(4.120)
If the handedness of two orthonormal coordinate systems is the same, a transformation
between them will have
=
1
and vectors and pseudovectors will both transform
normally. If the systems have opposite handedness,
la/&
=
-1
and vectors will
transform normally but pseudovectors will flip direction.
A
vector generated by a
cross product of two regular vectors
is
actually a pseudovector.
It is tempting to think that all this balderdash is somehow a subtle sign error
embedded in the definition of the cross product.
In
some cases, this is correct. For
example, when we define the direction of the magnetic field vector, which turns out
to be a pseudovector, we have implicitly made an arbitrary choice of handedness
that must be treated consistently. Another example is the angular momentum vector,
which is defined using a cross product. While you could argue that the “pseudoness”
of these two examples is just
a
problem with their definition, there are cases where
you cannot simply explain
this
property away. It
is
possible to design situations where
an experiment and its mirror image do not produce results which are simply the mirror
images of each other. In fact, the
Nobel
Prize was won
by
Lee and Yang for analyzing
these counterintuitive
violations
of
purity conservation.
The classic experiment was
first performed by
Wu,
who showed
this
effect with the emission of beta particles
from Cobalt-60, under the influence of the weak interaction.
4.6.2
Pseudoscalars
The ideas that led us to the concept
of
pseudovectors apply to scalars as well.
A
proper
scalar is invariant to any change of the coordinate system. In contrast, a pseudoscalar
changes sign if the handedness of the coordinate system changes.
A
pseudoscalar
involved in a transformation, governed by the transformation matrix
[a],
will obey
(4.121)
A
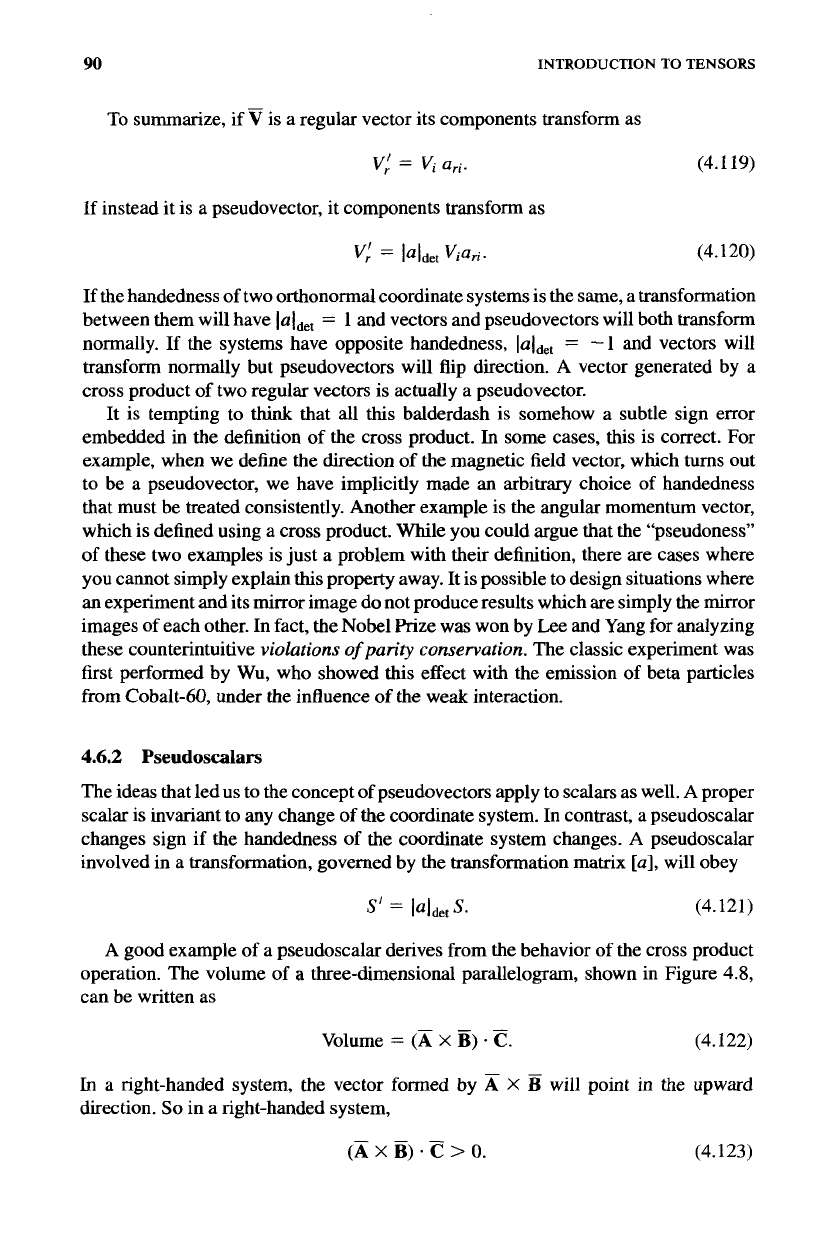
good example of a pseudoscalar derives from the behavior of the cross product
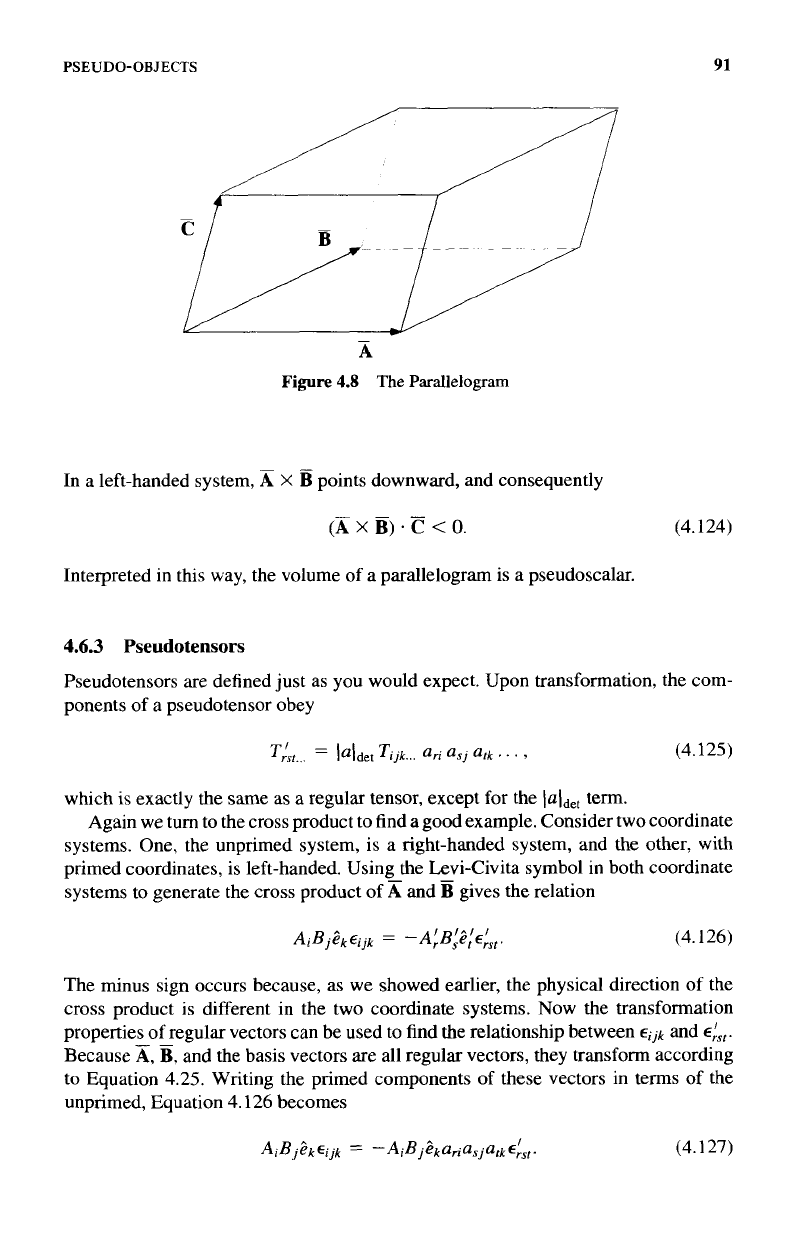
operation. The volume of a three-dimensional parallelogram, shown in Figure 4.8,
can be written as
Volume
=
(A
x
B)
.
C.
(4.122)
In
a
right-handed system, the vector formed by
A
X
B
will point in the upward
direction.
So
in a right-handed system,
(A
x
B)
i2
>
0.
(4.123)
PSEUDO-OBJECTS
91
In a left-handed system,
X
B
points downward, and consequently
(h
x
B)
.
c
<
0.
(4.124)
Interpreted in this way, the volume of a parallelogram is a pseudoscalar.
4.6.3
Pseudotensors
Pseudotensors are defined just as you would expect. Upon transformation, the com-
ponents of a pseudotensor obey
which
is
exactly the same as a regular tensor, except for the
laid,,
term.
Again we turn to the cross product to find a good example. Consider two coordinate
systems. One, the unprimed system, is a right-handed system, and the other, with
primed coordinates, is left-handed. Using the Levi-Civita symbol in both coordinate
systems to generate the cross product of
A
and
B
gives the relation
The minus sign occurs because, as we showed earlier, the physical direction
of
the
cross product is different in the two coordinate systems. Now the transformation
properties
of
regular vectors can be used to find
the
relationship between
Eijk
and
&.
Because
A,
B,
and the basis vectors are all regular vectors, they transform according
to Equation 4.25. Writing the primed components of these vectors in terms
of
the
unprimed, Equation 4.126 becomes
_-
92
INTRODUCTION
TO
TENSORS
This
expression is true for arbitrary
a
and
B,
so
we obtain the result
Eijk
=
-ariasjat&.
(4.128)
Keep in mind
this
applies only when the two systems have opposite handedness.
If both systems have the same handedness, the
minus
sign disappears.
Thus
for
the general case of arbitrary transformation between
two
orthonormal systems, the
Levi-Civita symbol components obey
Eijk
=
blder%%jatk'&t.
(4.129)
Consequently, the Levi-Civita symbol is a pseudotensor.
EXERCISES FOR CHAPTER
4
1.
2.
Determine the transformation matrix
[a]
that corresponds to a rotation of a two-
dimensional Cartesian system by
30".
Obtain the inverse of
this
matrix
[a]-'
and
evaluate the following operations:
(a)
a;'ajm.
(b)
aij'a,j.
(c)
Uj'Qmj.
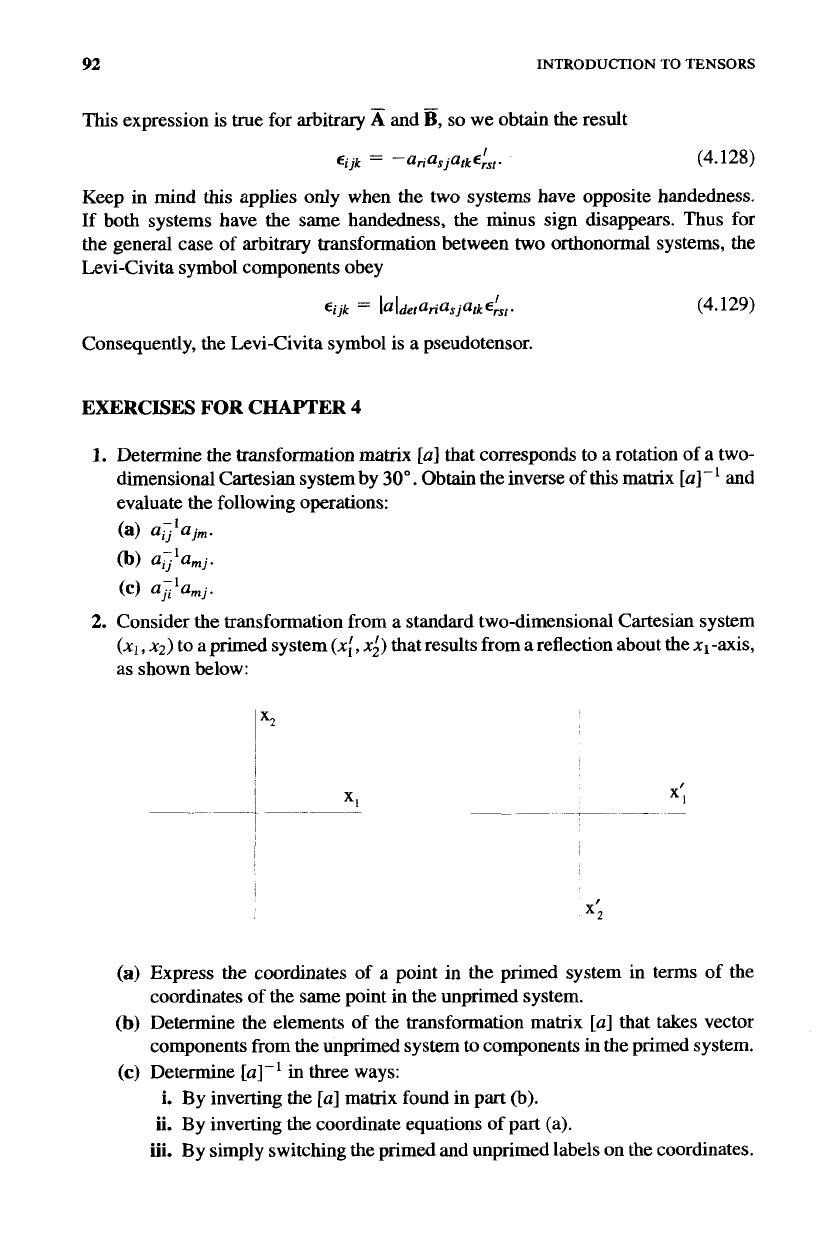
Consider the transformation from a standard two-dimensional Cartesian system
(xl,
xz)
to a
primed
system
(xi,
xi)
that results from a reflection about the
x1
-axis,
as shown below:
1
i
I
.I
Express the coordinates
of
a point
in
the primed system in terms of the
coordinates of the same point in the unprimed system.
Determine the elements of the transformation matrix
[a]
that takes vector
components from the unprimed system to components in the primed system.
Determine
[a]-'
in three ways:
i.
By inverting the
[a]
matrix found in part
(b).
ii.
By inverting the coordinate equations of part
(a).
iii.
By simply switching the primed and unprimed labels on the coordinates.
EXERCISES
93
3.
4.
5.
6.
7.
Determine the elements of the transformation matrix
[a]
that generates the Carte-
sian components of a vector from its components in the toroidal system defined
in Exercise
10
of Chapter
3.
The coordinates of a hyperbolic system
(u,
u,
z)
are related to a set of Cartesian
coordinates
(x,
y,
z)
by the equations
=
XL
-
Y‘
73
=
2xy
2
=
z.
Determine the elements of the transformation matrix
[a]
that takes the Cartesian
components of a vector to the hyperbolic components. Using this transformation
matrix and the position vector expressed in the Cartesian system, express the
position vector in the hyperbolic system.
Consider two curvilinear systems, an unprimed cylindrical system and a primed
spherical system.
(a)
What are the equations relating the cylindrical coordinates to the spherical
coordinates?
(b)
Find the elements of the transformation matrix
[a]
that generates the primed
vector components from unprimed components.
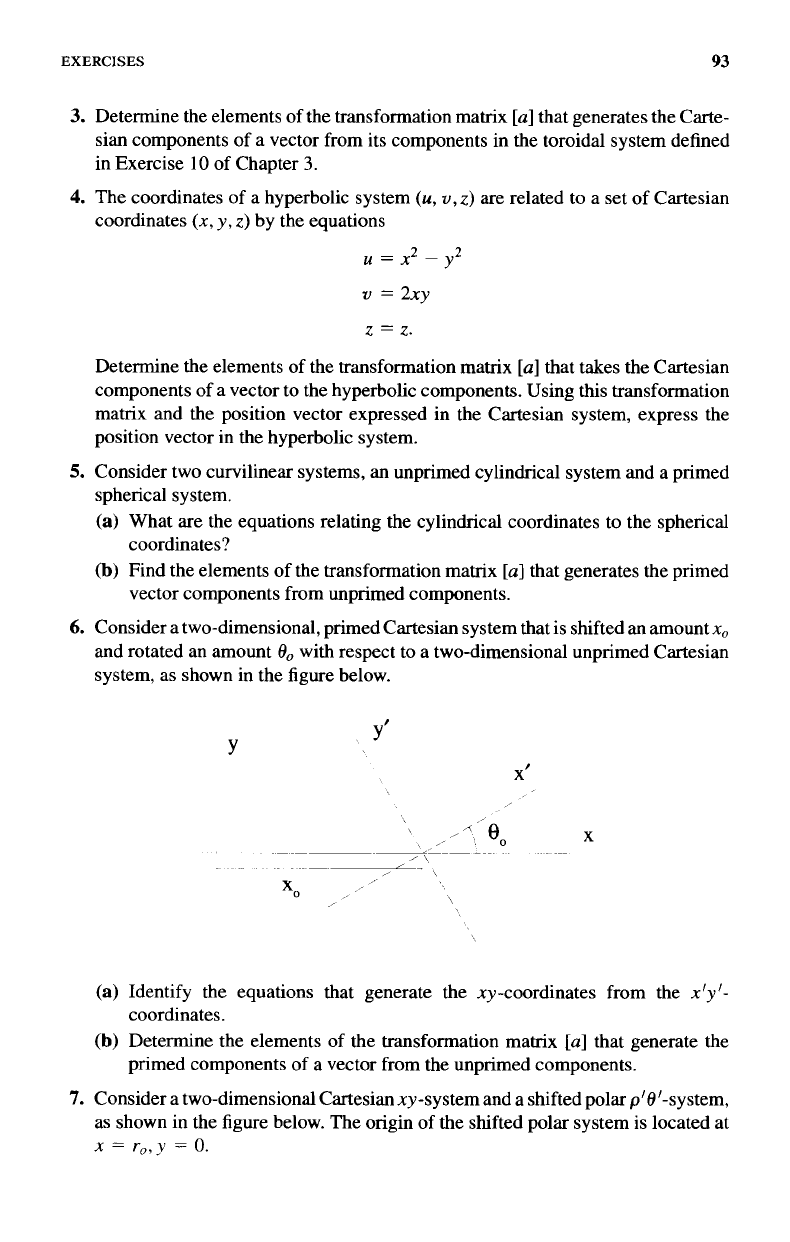
Consider a two-dimensional, primed Cartesian system that is shifted an amount
x,
and rotated an amount
0,
with respect to a two-dimensional unprimed Cartesian
system, as shown in the figure below.
Y’
Y
X’
A-
,\
(a)
Identify the equations that generate the xy-coordinates from the
x’y
’-
(b)
Determine the elements of the transformation mamx
[a]
that generate the
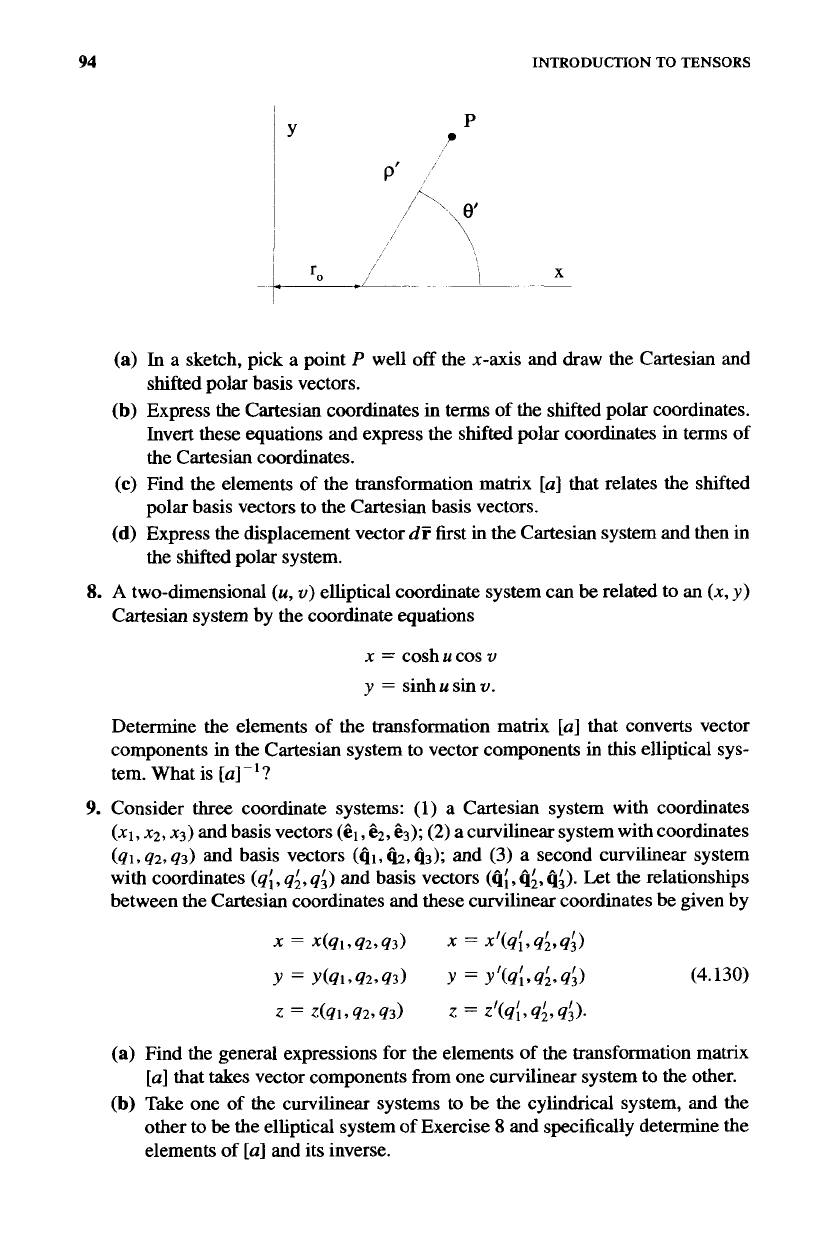
Consider a two-dimensional Cartesian xy-system and a shifted polar p’O’-system,
as shown in the figure below. The origin of the shifted polar system is located at
x
=
r,,y
=
0.
coordinates.
primed components of a vector from the unprimed components.
94
INTRODUCTION TO TENSORS
(a)
In
a sketch, pick a point
P
well
off
the
x-axis
and draw the Cartesian and
shifted polar basis vectors.
(b)
Express the Cartesian coordinates in terms of the shifted polar coordinates.
Invert these equations and express the
shifted
polar coordinates in terms of
the Cartesian coordinates.
(c)
Find the elements of the transformation matrix
[a]
that relates the shifted
polar basis vectors to the Cartesian basis vectors.
(d)
Express the displacement vector
dF
first in the Cartesian system and then in
the
shifted
polar system.
8.
A
two-dimensional
(u,
v)
elliptical coordinate system can be related to an
(x,
y)
Cartesian system by the coordinate equations
x
=
coshucos
v
y
=
sinhusinv.
Determine the elements of the transformation matrix
[a]
that converts vector
components in the Cartesian system to vector components in
this
elliptical sys-
tem. what
is
[a]-’?
9.
Consider
three
coordinate systems:
(1)
a Cartesian system with coordinates
(XI,
x2, x3)
and basis vectors
(el,
62,
&3);
(2)
a curvilinear system with coordinates
(91,
q2,
q3)
and basis vectors
(81,
&,
q3);
and
(3)
a second curvilinear system
with coordinates
(qi,q;,
4:)
and basis vectors
(qi,
q:,
a:).
Let
the relationships
between the Cartesian coordinates and these curvilinear coordinates be given by
x
=
xh3q29q3)
z
=
z(q1,
q27
q3)
x
=
X’(q;,q:,q:)
z
=
Z’M,
s;.
4:).
Y
=
Y(ql,q2>q3) Y
=
Y’(4;4;4:)
(4.130)
(a)
Find the general expressions for the elements of the transformation matrix
[a]
that takes vector components
from
one curvilinear system
to
the other.
(b)
Take one of the curvilinear systems to be the cylindrical system, and the
other to be the elliptical system of Exercise
8
and specifically determine the
elements of
[a]
and its inverse.
EXERCISES
95
10.
Consider a two-dimensional Cartesian system with coordinates
(x
-+
XI,
y
-+
x2)
and basis vectors
(6,
-+
61,C,
+
62)
and a polar system with coordinates
(p
-+
q1,4
+
q2)
and basis vectors
(6,
+
&,
64
-+
&).
(a)
Express the Cartesian coordinates
(xl,
x2)
in terms of the polar coordinates
(b)
Express the position vector
ii;,
first using the Cartesian basis vectors and then
using the polar basis vectors.
(c)
Determine the elements of the transformation matrix
[a]
that takes vector
components from
the
polar system to vector components in the Cartesian
system. Show that this transformation matrix works for the expressions for
the position vector of part (b) above.
(d)
What are the elements of
[a]-’,
the matrix that generates polar components
from the Cartesian components?
(e)
Determine the elements of the displacement vector
dii;
in the Cartesian and
polar systems.
(f)
A
second-rank tensor expressed in the Cartesian system takes the following
form
(41,
q2).
What are its elements in the polar system?
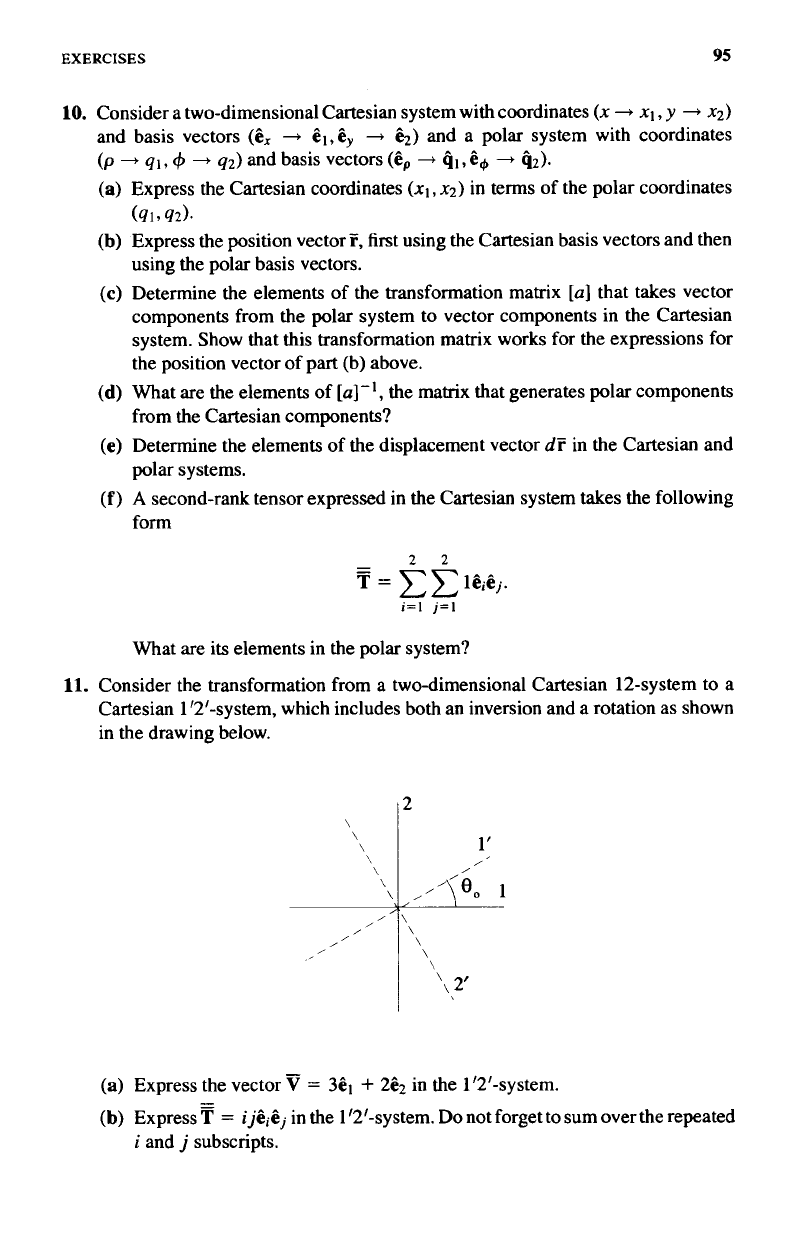
11.
Consider the transformation from a two-dimensional Cartesian 12-system to a
Cartesian 1’2’-system, which includes both an inversion and a rotation as shown
in the drawing below.
\
\
\
\
\
\
\
2
1’
/
,
,/+t
1
\
\
\
\
\\
2’
(a)
Express the vector
v
=
36’
+
222
in the 1’2’-system.
(b)
Express
T
=
ij@i6j
in the 1 ’2’-system. Do not forget to sum over the repeated
-
i
and
j
subscripts.