Kusse B.R., Westwig E.A. Mathematical Physics: Applied Mathematics for Scientists and Engineers
Подождите немного. Документ загружается.

626
INTRODUCTION TO GROUP
THEORY
A
normal mode
is
a state of motion that oscillates with constant frequency.
To
find
the normal modes,
we
therefore require
all
the coordinates oscillate at the same
frequency, i.e.,
4i
---f
seiw.
Applying
this
to Equation
15.63
gives
(15.64)
But notice
this
is the same as a typical eigenvalue problem,
where the eigenvalues are related to the normal frequencies by
rnw2
A=-.
k
(15.66)
This
means that to find the normal frequencies we just need to diagonalize the
[Vl
matrix. Unfortunately, diagonalizing a typical six-dimensional matrix is no easy task,
since it involves
finding
the roots of a sixth-order polynomial equation. But the
underlying symmetry of
this
problem, plus some physical reasoning, will let
us
find
these eigenvalues much more easily.
The physical system clearly has a
D3-type
symmetry. The representation
of
03
we need to consider for
this
problem
is
the set of
6
X
6
transformation matrices that
correspond to each symmetry operation acting on the
qi
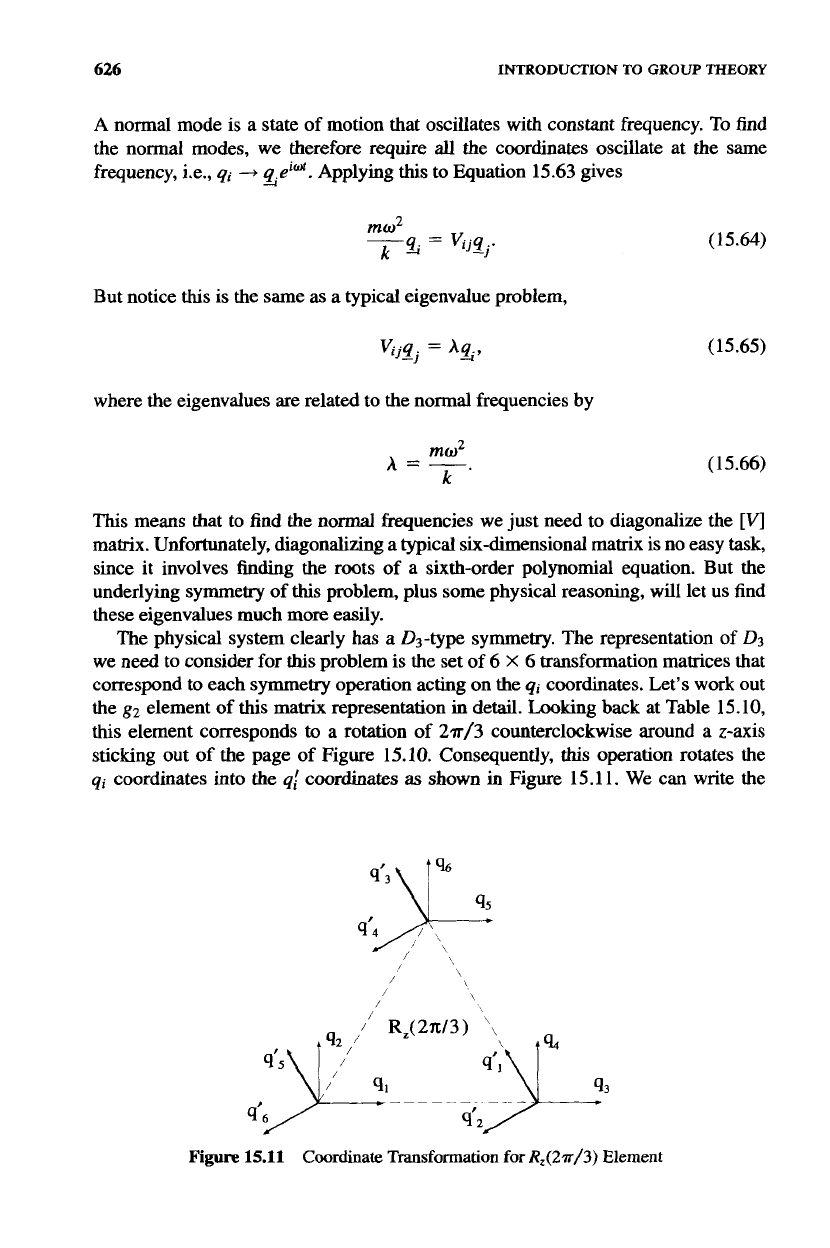
coordinates. Let’s work out
the
g2
element of
this
matrix representation in detail. Looking back at Table
15.10,
this
element corresponds to a rotation of
2m/3
counterclockwise around a
z-axis
sticking out
of
the page of Figure
15.10.
Consequently,
this
operation rotates the
qi
coordinates into the.
q;
coordinates
as
shown
in
Figure
15.11.
We can write the
Figure
15.11
Coordinate
Transformation
for
RZ(2n/3)
Element
IRREDUCIBLE
MATRIX
REPRESENTATIONS
RZ(2.rr/3)
+
627
-
0
0
0
0
-1/2
-&2-
0
0
0 0
fi/2 -1/2
-1/2
-&/2
0
0
0
0
Js/2
-1/2
0
0
0
0
0
0
-1/2
4/2
0 0
-0
0
&/2
-1/2
0
OA
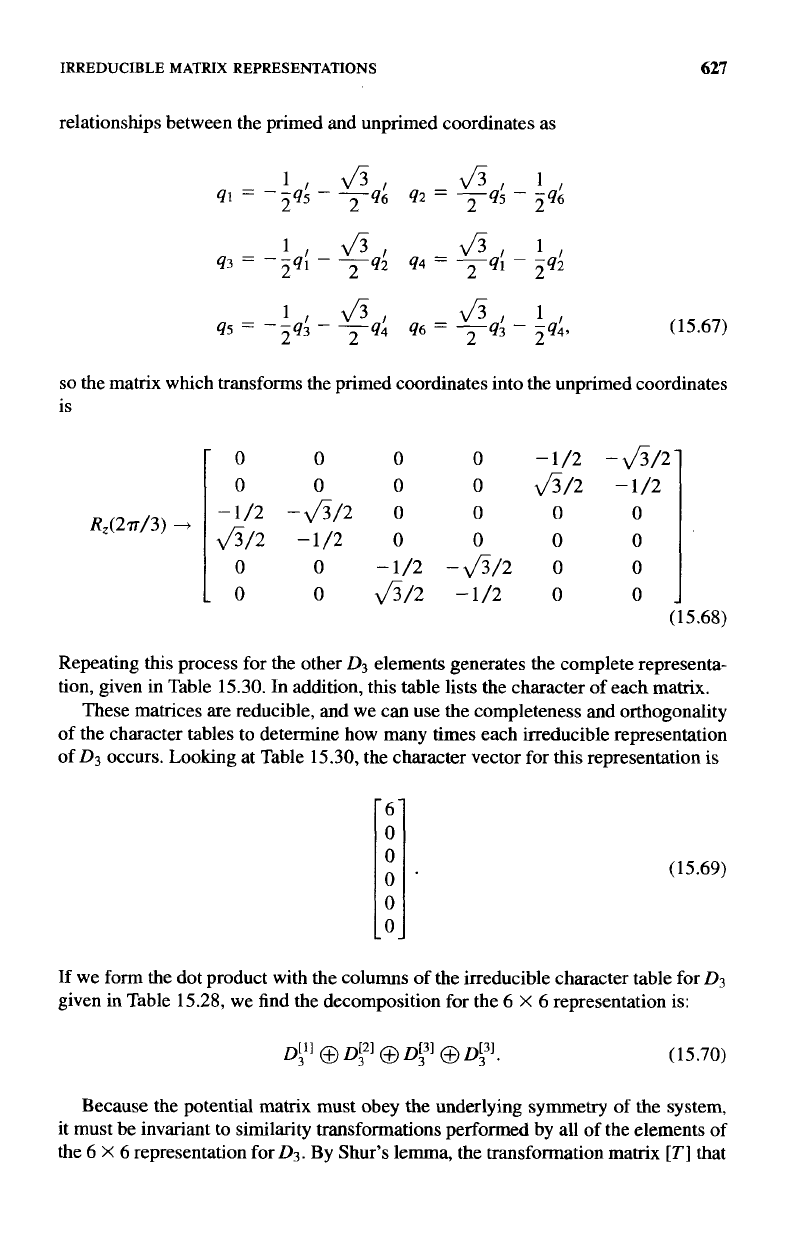
relationships between the primed and unprimed coordinates as
(15.67)
so
the matrix which transforms the primed coordinates into the unprimed coordinates
is
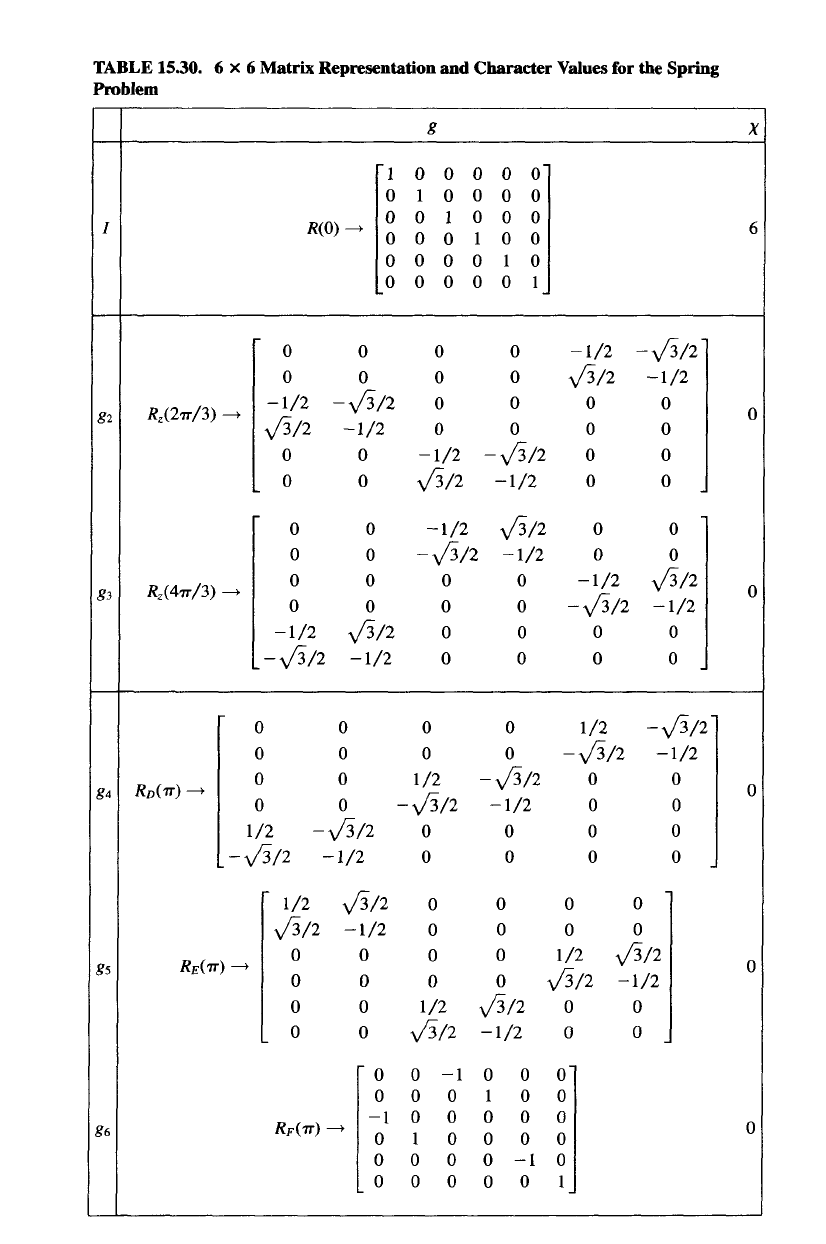
Repeating
this
process for the other
03
elements generates the complete representa-
tion, given in Table
15.30.
In
addition, this table
lists
the character
of
each matrix.
These matrices are reducible, and we can use the completeness and orthogonality
of
the character tables to determine how many times each irreducible representation
of
03
occurs. Looking at Table 15.30, the character vector for this representation is
(15.69)
If
we
form
the dot product with the columns of the irreducible character table for
03
given in Table 15.28, we find the decomposition for the
6
X
6 representation is:
DY1
0
Dfl
0
D!j3]
0
Db3].
(15.70)
Because the potential matrix must obey
the
underlying symmetry
of
the system,
it must be invariant to similarity transformations performed by all
of
the elements
of
the 6
X
6 representation for
D3.
By Shur’s lemma, the transformation matrix
[TI
that
TABLE
15.30.
6
X
6
Matrix
Representation
and
Character
Values
for
the
Spring
Problem
-
0
0
-1/2
&/2
0
0
0
0
-&/2
-1/2
0
0
0
0
0
0
-1/2 &/2
0 0 0
0
-&/2 -1/2
-1/2
&2
0
0
0 0
-&2
-1/2
0
0
0
0
-
1
r
010000
100000
-
0-10
0
0
00100
00000
10000
0
0
0-10
00001
-
I
001000
000100
R(O)
-+
I
1
L
000001
000010
6
0
0 0 0
-1/2 7/32
0
0
0
0
4/2
-1/2
-1/2
-&2
0
0
0 0
fi/2
-1/2
0 0 0 0
0
0
-1/2
-&2
0 0
0
0
&/2
-1/2
0
0
-+
0
0
0
0
1/2
-&2
0
0
0
0
7/42 -1/2
0
0
1/2 -&2
0
0
0
0
7/32
-1/2
0
0
1/2
7/32
0
0
0
0
7/32 -1/2
0
0
0 0
1/2
&/2
&/2 -1/2
0 0
0
0
0
0
0
0
0
IRREDUCIBLE
MATRIX
REPRESENTATIONS 629
-
-
A,
0 0 0
0
0
Oh20000
0
0
A3
0
0
0
0
0 0
A3
0
0
ooooA4o
[V’]
=
[T]-”V][T]
=
-
00000A‘l
-
(15.71)
’
where we have used [V’] to represent the
[Vl
matrix
in
this
diagonalizing coordinate
system. Already group theory has reduced the number of unknown eigenvalues of the
[V] matrix, and therefore the number of normal mode frequencies for our mass spring
problem,
from
six to four. Notice that
this
has been accomplished without actually
finding the elements of the
[TI
matrix.
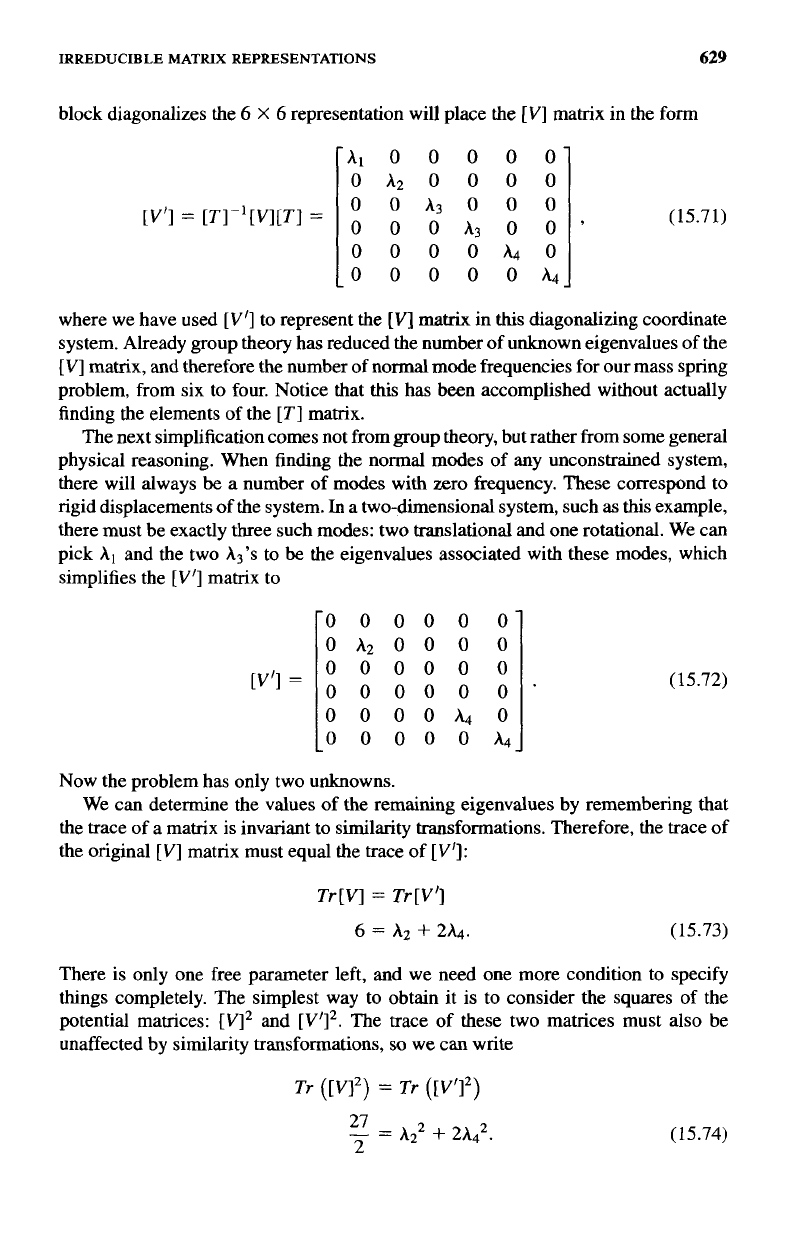
The next simplification comes not from group theory, but rather from some general
physical reasoning. When finding the normal modes of any unconstrained system,
there will always
be
a number of modes with zero frequency. These correspond to
rigid displacements of the system.
In
a two-dimensional system, such
as
this
example,
there must be exactly three such modes: two translational and one rotational. We can
pick
hl
and the two
h3’s
to
be
the eigenvalues associated with these modes, which
simplifies the [V’] matrix to
[V’]
=
000000
Oh2000
0
000000
000000
ooooA‘lo
oooooh,
(15.72)
Now the problem has only two unknowns.
We can determine the values of the remaining eigenvalues by remembering that
the trace of a matrix is invariant to similarity transformations. Therefore, the trace of
the original [V] matrix must equal the trace of [V’]:
(15.73)
There is only one free parameter left, and we need one more condition to specify
things completely. The simplest way to obtain it
is
to consider
the
squares of the
potential matrices: [VI2 and [V’I2. The trace of these two matrices must also be
unaffected by similarity transformations,
so
we can write
Tr
([V12)
=
Tr
([V’I’)
(15.74)
630
INTRODUCTION
TO
GROUP
THEORY
The simultaneous solution of Equations 15.73 and 15.74 gives the results
h2
=
3
and
&
=
312.
Combining these results with Equation 15.66, we finally have the normal frequen-
cies:
The first two frequencies are degenerate, since
o,
occurs three times and
wb
twice.
15.5
CONTINUOUS
GROUPS
So
far,
all
the groups we have discussed have had a finite number
of
discrete elements.
There
is
another
type
of
a
group that
has
an infinite number of elements, described as
a
function of one or more continuous variables.
This
section briefly discusses three
examples
of
this
type
of
group.
15.5.1
The
2D
Rotation
Group
The C, group consisted
of
four
elements that could
be
viewed physically as the
rotations in
a
plane which left a square in a state indistinguishable from its initial
state. We mentioned that
this
group could
be
generalized
to
C,,,
to handle the symmetry
of
a
polygon with
n
sides.
What happens when we let
n
--f
m?
Now
we
really have
an
infinite number of
elements which correspond to any rotation angle in the plane.
If
we use the
"R'
notation for rotations, the group elements can
be
written
as
continuous function
of
the angle, which we call
8,
(15.76)
with
0
5
8
<
277.
Let's check to be sure that
this
definition of the group elements
satisfies the requirements
of
a group:
1. The two rotations applied in succession,
R(
Ol)R(
q),
is equivalent to
R(
61
+
Oz),
which is also an element of the group. Keep
in
mind that
if
81
+
S,
falls outside
the range
of
0
to
27r,
it is necessary to subtract an integer multiple
of
21r
to put
the result back into the
0
to
27r
range.
2.
The multiplication
is
associative, because
[R(81)R(&)]R(8d
=
R(61
+
02
+
3.
There is an identity element,
Z
=
R(0).
4. Each element
R(8)
has
an
inverse
R(277
-
0).
63)
=
R(@1)"82)R(83)1.
631
CONTINUOUS
GROUPS
We can also generate some matrix representations for these elements.
An
obvious
one-dimensional choice is the complex exponentials:
R(e)
-+
ei@.
(15.77)
A
different, two-dimensional representation is the set of matrices
(15.78)
It is a worthwhile exercise to convince yourself that both these representations obey
the underlying group multiplication table.
15.5.2
The
3D
Rotation
Group
0;
The set of all possible rotations in three dimensions is another example of acontinuous
group.
It is easy to show that all four group axioms are still satisfied when we move
into three dimensions.
The matrix form for the continuous two-dimensional rotation group, given by
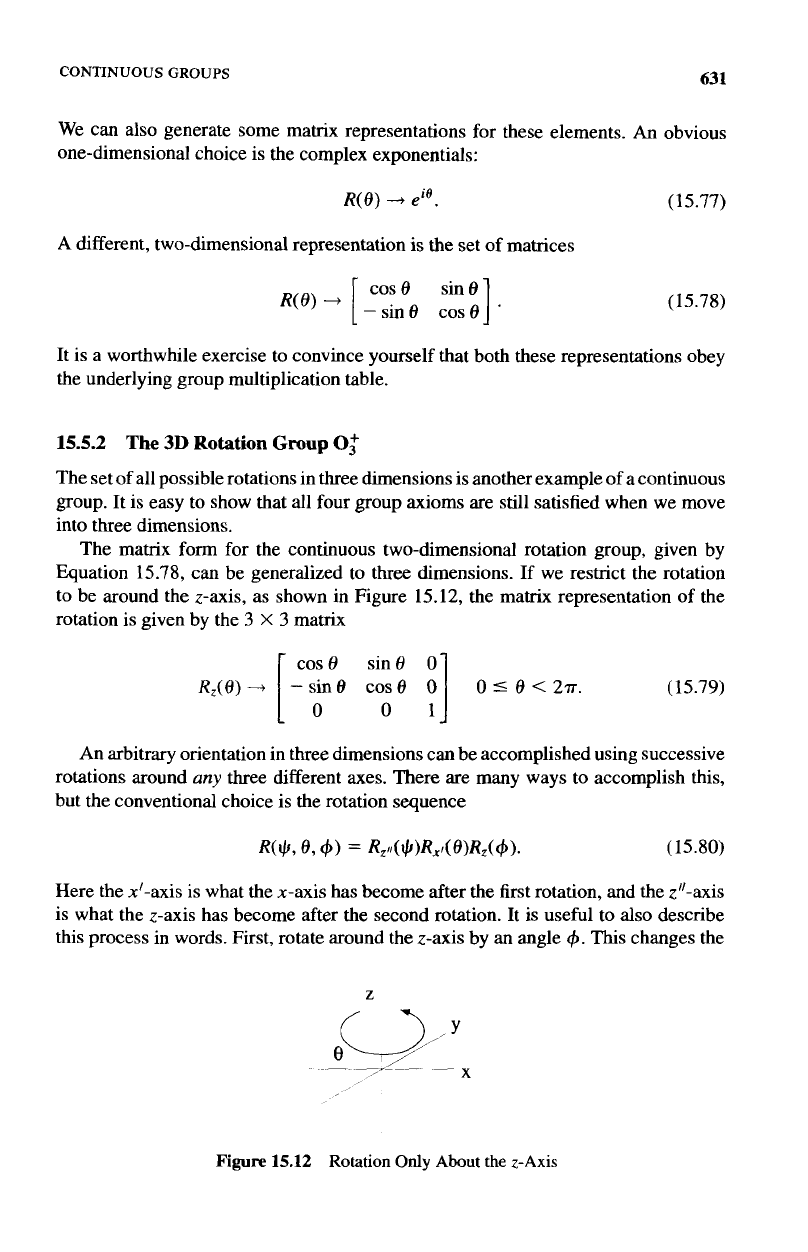
Equation 15.78, can be generalized to three dimensions. If we restrict the rotation
to be around the z-axis, as shown in Figure 15.12, the matrix representation of the
rotation is given by the
3
X
3
matrix
An
arbitrary orientation in three dimensions can be accomplished using successive
rotations around
any
three different axes. There are many ways to accomplish this,
but the conventional choice
is
the rotation sequence
Here the xl-axis is what the x-axis has become after the first rotation, and the z"-axis
is what the z-axis has become after the second rotation. It is useful
to
also describe
this process in words. First, rotate around the z-axis by an angle
4.
This
changes the
Z
Figure
15.12
Rotation
Only
About
the
z-Axis
632
INTRODUCTION
TO
GROUP THEORY
X
X’
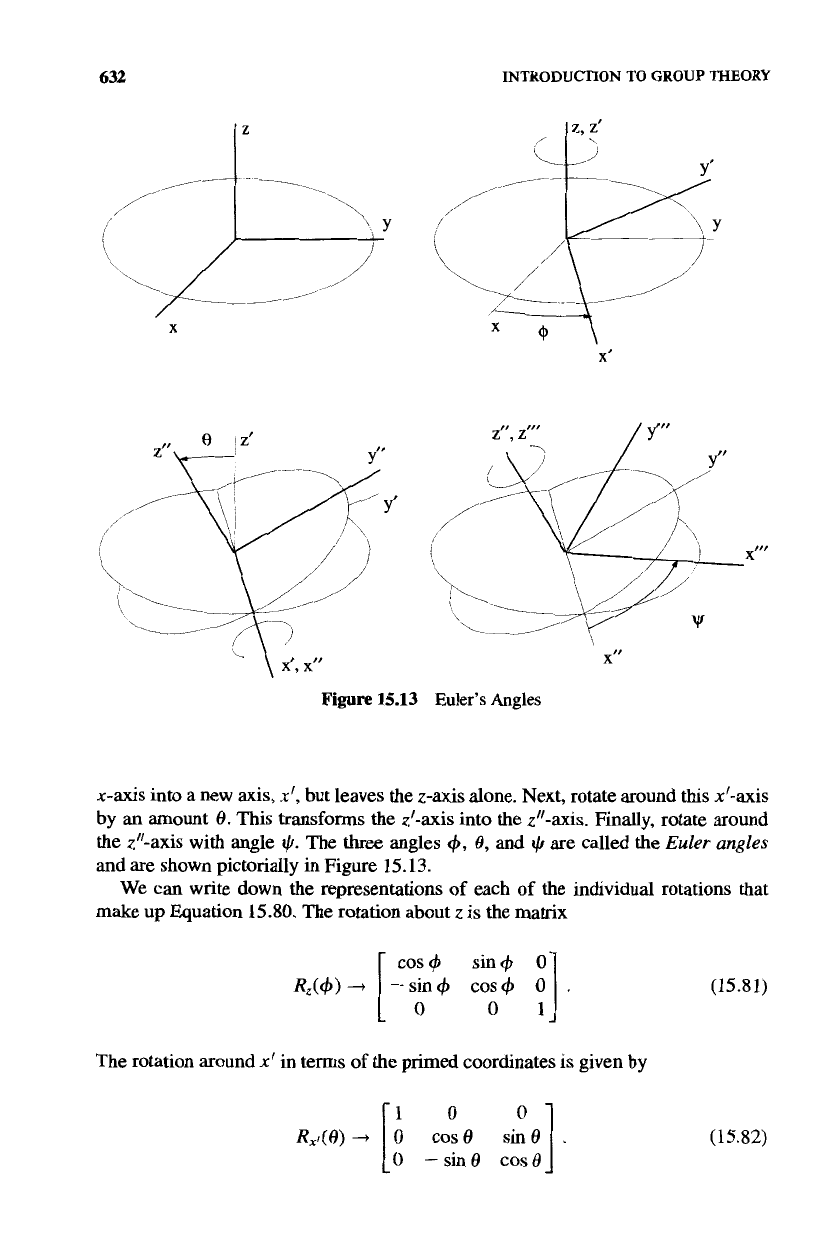
Figure
15.13
X”
Euler’s Angles
x-axis into a new axis,
x’,
but leaves the
z-axis
alone. Next, rotate around this x’-axis
by an amount
8.
This transforms the z’-axis into the z”-axis. Finally, rotate around
the z”-axis with angle
$.
The
three
angles
+,
8,
and
$
are called the
Euler
angles
and are shown pictorially in Figure
15.13.
We
can write down the representations
of
each
of
the individual rotations that
make
up Equation
15.80.
The rotation about
z
is the matrix
(15.81)
The
rotation around
x’
in terms of the primed coordinates is given by
(
1
5.82)
CONTINUOUS GROUPS
633
The final rotation around
z”
in terms of the double primed coordinates is
Multiplication of these three matrices gives the intimidating
3
X
3 matrix:
--
cos
8
sin
+
sin
4
:
cos
0
sin
I,!J
cos
4
:
sin
8
sin
+
+
COS~COS+
:
+sin+cosI,!J
:
......................................................
-
cos
0
cos
+
sin
4
:
cos
0
cos
+
cos
4
:
sin
0
cos
+
-
sin+ccosc$
:
-
sin+sin+
:
......................................................
sin
8
sin
4
:
-sin8cos4
:
cos8
.84)
Because this matrix represents
a
rigid rotation of coordinates, it is necessarily
orthonormal. It also has a determinant of
+
1. In fact, if
+,
8,
and
4
are allowed
to roam over their entire
0
to
2.rr
ranges, we have
all
the possible
3
X
3
orthogonal
matrices with
+
1
determinants. For this reason, when the group of three-dimensional
rotations is written in this manner, it is called
0:
,
where
the
0
stands for orthogonal,
the
3
for the dimension, and the
+
to indicate the sign of the determinant. In the
literature, it is also frequently called
S0(3),
where the
S
stands for the “special”
condition of a
+1
determinant. You also might run into the term
unimodulur
to
describe matrices with
+
1
determinants.
15.5.3 The Group
of
Special
Unitary
Matrices
SU(2)
Our last example
of
a continuous group is the complete set of
2
X
2
unitary matrices,
with determinants of
+
1.
This group is commonly called
SU(2).
A
matrix is unitary
if its inverse is equal to the complex conjugate of its transpose. The general form of
a
2
X
2
matrix that satisfies these conditions is
(15.85)
with the requirement that
g
g”
+
b
b*
=
1
to ensure the unimodular condition. Notice
there are really three free parameters here, because the real and complex parts of
and
b
provide two each, but the unimodular condition reduces
this
number by one.
To show that these matrices form a group, we need to prove that the multiplication
of any two of them still has the general form of Equation 15.85.
This
can be verified
634
INTRODUCTION
TO
GROUP THEORY
by forming the product
-
b&
a19
+be;
]
.
(15.86)
-9
a
-g2g
-
a;&;
-by$
+
a;a;
Now define
g3
=
g1a2
-
l~,&
and
b3
=
g19
+
blal,
and notice the right-hand side
of
Equation
15.86
can now
be
written
as
(15.87)
The unimodular condition still holds:
This
group can be generalized to
SU(n),
the set of
n
X
n
unimodular, unitary
matrices. These matrices can
be
shown to have
(n2
-
1)
independent parameters.
EXERCISES
FOR
CHAPTER
15
1.
Let
S
be
a subgroup
of
a larger group
G.
If
gi
is an element in
G
that is not in
S,
2.
Show that there
are
only two distinct fourth-order groups.
3.
How many classes does the vierergruppe have?
4.
Identify all the subgroups of
D3.
For each subgroup, indicate the elements of
all
its
possible left and right cosets. Show that the ratio
h/h'
is
an
integer for all of
the subgroups, where
h
is the order of
03
and
h'
is the order
of
the subgroup.
show that
gi'
is
also
not in
S.
5.
Three elements of a group are represented by the following
2
X
2
matrices,
where
w
=
ei2x'3.
(a)
What are the other elements of
this
group?
(b)
For
each element identify its inverse.
(c)
Find
all
the subgroups and identify their elements.
EXERCISES
635
6.
In Table 15.21, we presented a
3
X
3
matrix representation of the
D3
group.
(a)
Find the transformation matrix that puts
this
representation in block diagonal
(b)
What is the inverse of
this
transformation matrix?
(c)
Show that the character
of
the matrices in the block diagonal form are the
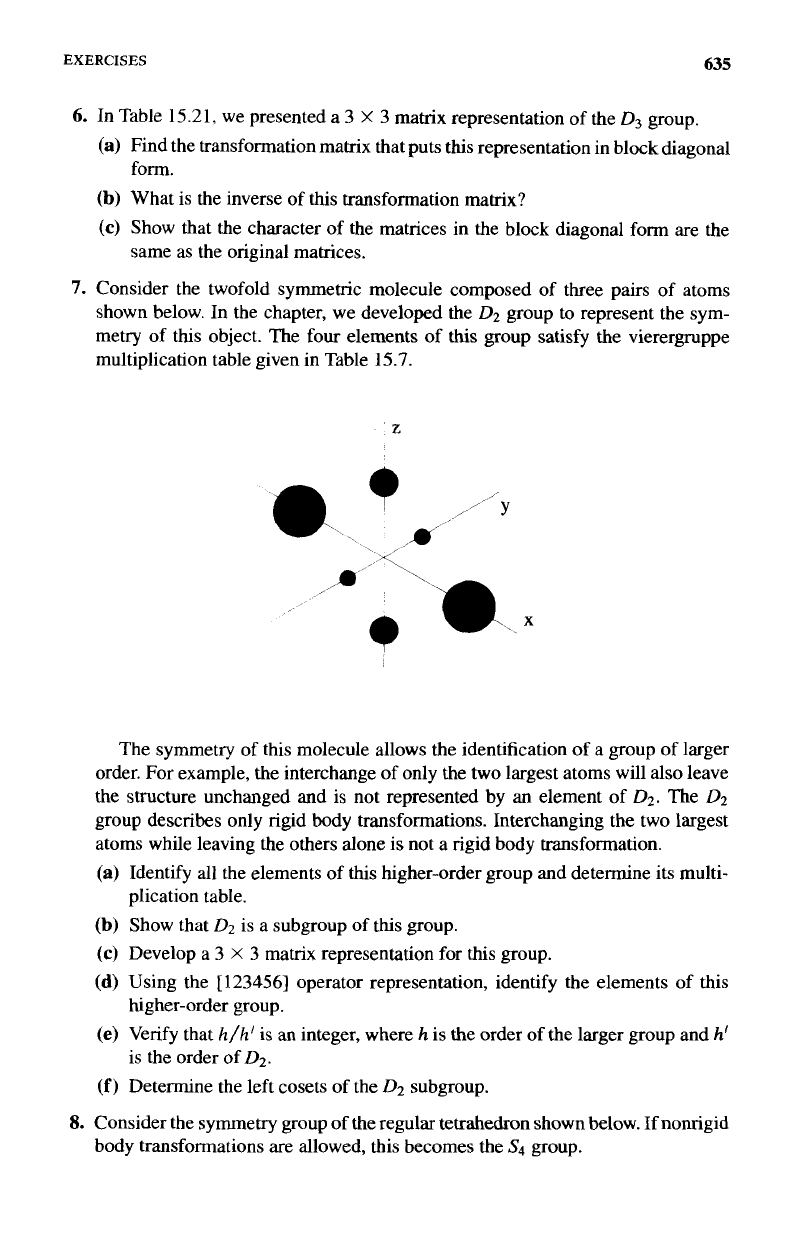
7.
Consider the twofold symmetric molecule composed of three pairs
of
atoms
shown below. In the chapter, we developed the
02
group to represent the sym-
metry of this object. The four elements
of
this
group satisfy the vierergruppe
multiplication table given in Table
15.7.
form.
same as the original matrices.
The symmetry of this molecule allows the identification of a group of larger
order. For example, the interchange of only the two largest atoms will also leave
the structure unchanged and is not represented by an element
of
D2.
The
02
group describes only rigid body transformations. Interchanging the two largest
atoms while leaving the others alone is not a rigid body transformation.
(a)
Identify all the elements of
this
higher-order group and determine its multi-
(b)
Show that
D2
is
a
subgroup
of
this group.
(c)
Develop a
3
X
3
matrix representation
for
this group.
(d)
Using the
[123456]
operator representation, identify the elements of this
(e)
Verify that
h/h'
is
an
integer, where
h
is
the
order of the larger group and
h'
(f)
Determine the left cosets of the
02
subgroup.
plication table.
higher-order group.
is the order of
02.
8.
Consider the symmetry group of the regular tetrahedron shown below. If nonrigid
body transformations are allowed, this becomes the
S4
group.