Kusse B.R., Westwig E.A. Mathematical Physics: Applied Mathematics for Scientists and Engineers
Подождите немного. Документ загружается.

656
CHRISTOFFEL SYMBOLS
\
I
--.
i
;
x1
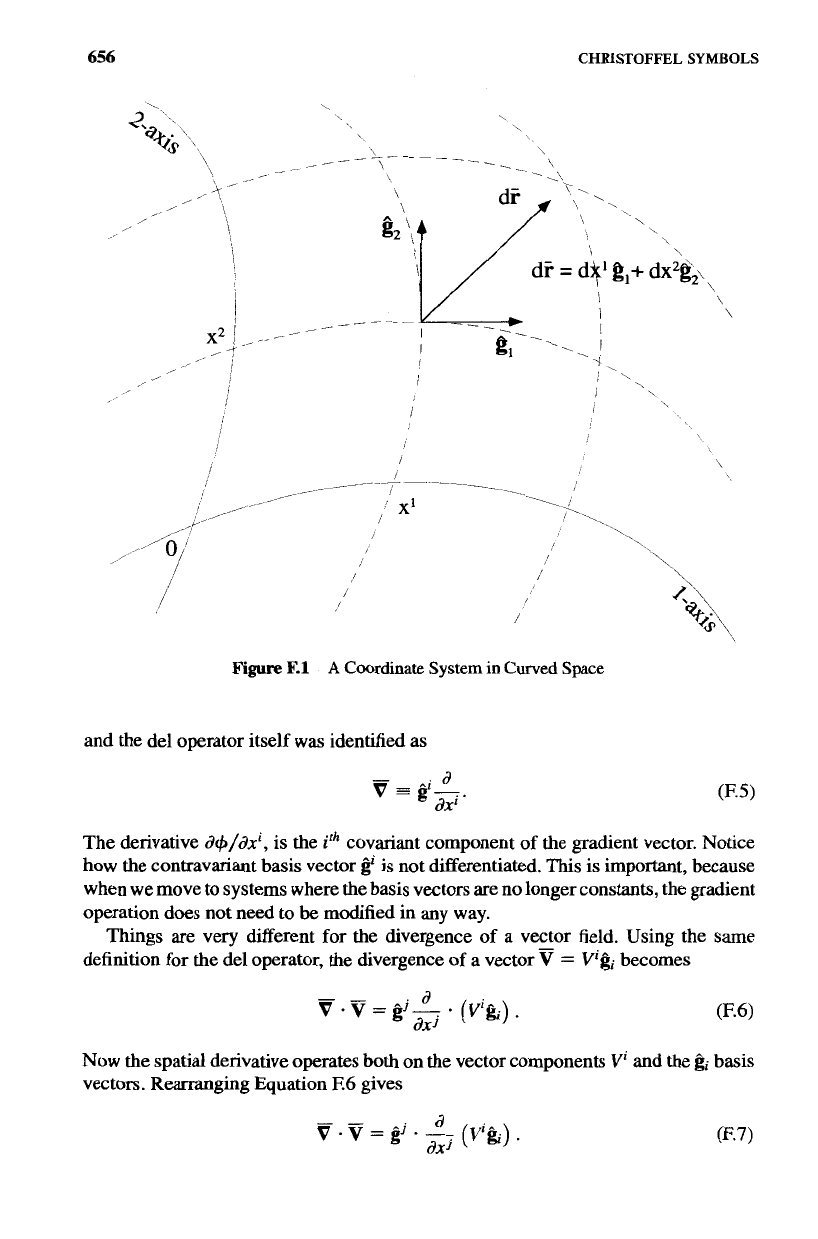
Figure
El
A
Coordinate
System
in
Curved
Space
and the del operator itself
was
identified as
The derivative
d+/dx',
is the
irh
covariant component of the gradient vector. Notice
how the contravariant basis vector
g
is not differentiated.
This
is
important, because
when we move to systems where the basis vectors are no longer constants, the gradient
operation does not need
to
be
modified in any way.
Things are very different for the divergence of a vector field. Using the same
definition for the del operator, the divergence of a vector
v
=
Vi&
becomes
Now the spatial derivative operates both on the vector components
V'
and the
gi
basis
vectors. Rearranging Equation
F.6
gives
-
v
.
v
=
gj
.
(vie).
F.7)
axJ
CHRISTOFFEL
SYMBOLS
657
If
the basis vectors
are
not constants, the
RHS
of Equation
F.7
generates two terms
The last term in Equation
F.8
is usually defined in terms of the
Christoffel
symboE
rkj:
The definition in Equation
F.9
implies the result
of
the differentiation on the
LHS
must be a vector quantity, expressed in terms of the covariant basis vectors
&.
The contravariant components
of
the vector quantity are given by the Christoffel
symbol with a superscripted
k.
These components obviously also depend
on
which
basis vector
is
being differentiated, given by the
i
index, and which coordinate the
differentiation is being taken with respect to, given by the
j
index. Because
of
the nature
of
the
LHS
of
Equation
F.9,
these indices are written as subscripts,
so
that the Christoffel symbol in Equation
F.9
obeys the normal superscriptlsubscript
conventions. It is important to note, however, the Christoffel symbol is not a tensor.
Its elements do not transform like the elements
of
a tensor.
In order to complete our discussion of the divergence, we must evaluate the
Christoffel symbols in terms of the coordinate system geometry. Equation
F.9
can be
solved for
rkj
by dot multiplying both sides by
g':
or
(F.
10)
(F.
1
1)
The basis vectors can still be written in terms of derivatives of the position vector,
so
the Christoffel symbol becomes
(F.12)
(F.13)
This equation clearly indicates that the Christoffel symbol has a symmetry with
respect to the subscripted indices
Equation
F.
13
provides
a
method for evaluating the Christoffel symbol, but it is
not very useful because it is in terms
of
the derivatives
of
the position vector and
the basis vectors
of
the coordinate system.
A
more useful relation can be derived by
658
CHRISTOFFEL SYMBOLS
considering the metric. Remember the metric for a coordinate system is
M..
1J
=
&
.
g.
I'
(F.
15)
Even though the Christoffel symbol is not a tensor,
this
metric can be used to define
a new set of quantities:
This quantity,
rbj,
is often called a Christoffel symbol
of
the
first kind, while
rkj
is
a
Christoffel symbol of the second kind. Notice the Christoffel symbol
of
the first
kind exhibits the
same
symmetry with respect to the last two subscripts:
Combining Equations
F.
1
1
and
F.
16
gives
The spatial derivative
of
the metric,
can now be written in terms
of
Christoffel symbols
as
Similarly,
and
(F.
18)
(F.
19)
(F.20)
(F.21)
(F.22)
Adding Equation
F.22
to
F.2 1
and subtracting
F.20,
while malung use
of
the symmetry
of
the Christoffel symbols, gives
(F.23)
CHRISTOFFEL SYMBOLS
659
Raising the first index with the metric gives an expression for the Christoffel symbol
of the second kind
in
terms of the coordinate system's metric:
(F. 24)
This equation allows us to evaluate the Christoffel symbol if we
know
the metric.
Christoffel symbol as
Returning to the divergence operation, Equation
F.8
can now be written using the
(F.25)
The quantity in brackets
on
the
RHS
is referred to as the covariant derivative of a
vector and can be written a bit more compactly as
(F.26)
where the Christoffel symbol can always be obtained from Equation
F.24.
If
the basis
vectors are constants,
r;,
=
0,
and the covariant derivative simplifies
to
(F.27)
as you would expect.
V
is
The curl operation can be handled in a similar manner. The curl of the vector field
d
-
v
x
v
=
gj-
x
pigi),
ax]
which, written in terms
of
the covariant derivative, is
(F.28)
(F.29)

This Page Intentionally Left Blank
CALCULUS
OF
VARIATIONS
The development
of
the calculus of variations begins with
an
integral in the following
form:
I
=
l;
dxfb,Y(z),dY/dzl.
(G.1)
The function in the integrand depends upon the independent variable
x
and on the
unknown function
y(x)
and its derivative
dy/dz.
Both
y(z)
and its derivative are
taken to be functions of the independent variable
2.
The problem is to determine the
function
y(x)
so
as to minimize the value of the integral.
An
example of such
an
integral
is.
This
form
looks
like that of
an
integral equation because the unknown function is
inside an integral operation. But it is unlike
an
integral equation in that the value of
the integral is not known and also because the minimization of
I
does not uniquely
determine
y(z)
unless a set of boundary conditions like
((3.3)
((3.4)
is specified. Here
y1
and
y2
are known constants.
The minimization process is accomplished
by
introducing a parameter
a
so
that
I
---f
I(a)
and requiring
dI/dcr
=
0
at
Q
=
0.
The
cr
parameter is introduced by
letting
where
y(z)
is the function that minimizes
I(Q)
with
(1y
=
0.
The idea is that adding
any function
~(x)
with
cy
#
0
causes
I(a)
to
be larger than
I(a
=
0).
Y(Z)
+
Y(Z,
=
Y(Z)
+
adz)
((3.5)
661
662
CALCULUS
OF
VARIATIONS
The function
~(x,
a)
and its derivative are then introduced into the integrand of
Equation
G.
1.
The boundary conditions
A
shorthand notation
(G.lO)
(G.
1
1)
will be used
to
simplify the equations.
The problem now becomes one of minimizing
I(a)
with respect to
a!
where
(G.
12)
(G.13)
(G.
14)
(G.15)
(G.16)
To
accomplish this take
d/da
of
the above expression and set it equal
to
zero at
a!
=
0.
(G.17)
or
Now
so
(G.20)
CALCULUS
OF
VARIATIONS
663
and
so
that
((3.21)
Notice that these partial derivatives
of
y(x,
a)
and
yr(x.
a)
with respect
to
cy
are
no
longer a function
of
0.
Substituting the5e values
for
the partial derivatives
of
y(x.
0)
and
gL
(L.
a)
into
Equation
G.
18
gives,
The second integral
is attacked by an integration
by
parts with
and
so
that
((3.24)
((3.25)
((3.26)
(G.27)
The first term on the right hand side
of
this equation vanishes because
~(r)
is zero at
XI
and
.r2.
The minimization condition then becomes
(G.29)
Since this must be true for any
q(x)
when
(Y
=
0,
the condition
for
minimizing
I(<?)
becomes
(G.30)
((3.3
1
)
664
CALCULUS
OF
VARIATIONS
where
Y
=
Y(X>
a)
=
Y(X)
+
Q+)
(G.32)
and the function y(x) is
the
function we seek, the function that minimizes the original
integral. In the limit
(Y
=
0
the above condition for minimization of the original
integral becomes
and
dY
(X)
yx
=
-.
dx
Equation
G.33
is solved for
y(x)
given the boundary conditions
This is known as Eulers Equation. It can be written in equivalent form as
(G.33)
(G.34)
(G.35)
(G.36)
(G.37)
(G.38)
This equivalence can be seen
by
expanding the total derivative with respect to x.
Equation
G.33
is
useful if there is no explicit y-dependence in the integrand because
it reduces to
(G.39)
Equation
G.38
is useful iff
has
no explicit x-dependence because it reduces to
(G.40)
ERRATA
LIST
p.
10
Change Equation 1.48 to read:
lc\
=
(A1
IBJ
sin0,
p.
16
(i) Exercise
2.
first equation, change
c,
j
to
i,
j:
=
ij2
for
2,j
=
1,2,3,
(ii) Exercise 4, first line, change
"row
matrix" to "column matrix".
(iii)
Exercise 4, first equation, change equation
to
read:
"Dl [VII
+
=
Vl+
[Dl
p. 49
Change Equation
3.14
to read:
-
r
=
(F
.
eT)&
+
(T
.
&)&
+
(F
.6+)6+.
p.
64
Exercise
20,
change equation to read:
-
B
=
BOG,.
p.
65
Exercise
20.
change equation to read:
(1.48)
(3.14)
665