Миронов С.В., Пищухин А.М. Метасистемный подход в управлении
Подождите немного. Документ загружается.

21
очередь, алгоритмов функционирования систем управления.
В соответствии с определением, матричные системы управления можно
классифицировать в направлении обработки информации по количеству
уровней иерархии, типу самого верхнего уровня, на котором производится
разветвление структур, степени разветвленности выбора на каждом уровне. В
поперечном направлении можно разделять матричные системы по составу
входящих в нее структур (систем самого нижнего уровня), по числу источни-
ков управляющего воздействия и исполнительных устройств и по процедуре
замены /12/ одной группы функционирующих систем на другую.
1) По типу самого верхнего уровня, на котором начинается ветвление
структур, можно выделить следующие классы систем.
Если задающие блоки обеспечивают лишь уставки для регулирования –
уровень технологических режимов (множество задающих блоков = {const1,
const2,…, constN}), то систему можно назвать многорежимной, и ее работа
заключается в своевременном переключении или поддержании этих режи-
мов. Такова, например, система управления сборочным автоматом, закручи-
вающим гайки с разными моментами затяжки.
Задающие блоки могут реализовывать ту или иную функцию (множест-
во задающих блоков = {f1(), f2(),…,fN()}), и тогда система станет
многофункциональной. Примером такой системы является система
управления сварочным роботом. Обеспечивая функции перемещения
сварочной головки во времени вдоль координат, система управления может
придать ей сложную траекторию в пространстве.
Задаваемые функции могут объединяться в группы и образовывать не-
кие операторы (множество задающих блоков = {А1[], А2[],…,AN[]}), прида-
вая тем самым системе статус многооператорной или, поскольку выполне-
ние оператора есть операция - многооперационной. В технике совокупность
нескольких функций приводит к выполнению операции (например, нагревая
кольцо и сажая его прессом на деталь, будем выполнять операцию посадки с
натягом). Поэтому сборочный автомат, осуществляющий несколько посадок
одновременно или целую гамму посадок последовательно, можно назвать
многооперационным.
Операторы могут объединяться в команды, и в этом случае мы имеем
дело с многокомандной системой. Сложный сборочный робот имеет свой
язык команд и тем самым управляется многокомандной системой. Команды,
в свою очередь, могут быть объединены в программу - в этом случае система
многопрограммная (мультипрограммная). Гибкая автоматическая линия,
собирающая некоторую размерную гамму какой-либо сборочной единицы,
например, шестереночного насоса, может служить примером автомата с мно-
гопрограммным управлением.
Программа, в свою очередь, реализует какой-либо метод управления
(алгоритм или технологию). Такую систему можно назвать системой с воз-
можностью выбора метода (технологии). Это может быть многопотоковая
автоматическая линия, на которой одна и та же сборочная единица может из-
готавливаться по нескольким технологиям (например, литьем, ковкой или
22
механической обработкой). При выходе из строя какого-либо оборудования
просто меняется технологический маршрут.
С помощью методов решаются задачи, поэтому система более высокого
уровня становится многозадачной. Переналаживаемая автоматическая ли-
ния является многозадачной.
Роль задающих блоков в системе управления могут играть люди - субъ-
екты. Учитывая, что субъект может ставить и менять цели, только в этом
случае система управления станет многоцелевой. В такой постановке цели
рассматриваются как совокупности нескольких задач. Примером может слу-
жить автоматизированная система управления сборочным цехом.
Итак, многоуровневое управление включает в себя иерархию целей, за-
дач, методов, программ, команд, операций, функций и уставок. Кроме того,
внутри каждого уровня может быть дополнительное разбиение задач на под-
задачи, методов на методики, программ на подпрограммы и так далее.
Возможны также различные комбинации указанных типов задающих
блоков с пропуском некоторых уровней.
Как указано в /3/, стратификация не поддается полной формализации.
Однако для автоматизации определенность в этом вопросе крайне важна. По-
этому приведенная классификация может носить рекомендательный характер
и обосновываться следующими соображениями.
Если система управления функционирует с объектами управления раз-
ных классов, то она явно многозадачная, так как в этом случае для каждого
класса объектов необходимы свои методы, программы, команды и так далее.
Если же все объекты относятся к одному классу, но диапазоны измене-
ния признаков не могут быть перекрыты одним методом управления, необ-
ходимо объединять в систему несколько различных методов, и система ста-
новится многометодной.
Метод включает в себя как набор определенных действий, так и режи-
мы, поэтому, если в системе управления меняется и то и другое (меняется
программа), то система называется многопрограммной. Если реализация ме-
тодов отличается только действиями, система управления станет многоко-
мандной, если только режимами, то – многооперационной.
Режимы, в свою очередь, могут изменяться непрерывно в многофунк-
циональной системе или дискретно в многорежимной системе. Подобная ие-
рархия поясняется рисунком 2.4.
Можно пойти и в обратном порядке. Фиксированные режимы образуют
уставки, меняющиеся режимы задаются функциями, совокупность функций в
математике образует оператор, совокупность операторов выполняет команду,
совокупность команд складывается в программу, программы реализуют не-
кий метод, а методы решают поставленные задачи. Наконец, решением задач
достигается цель. Цель же может поменять только человек, находящийся в
контуре управления.
Важность выделения иерархических уровней обусловлена еще и специ-
фикой управления в условиях разных частот возмущающих воздействий,
действующих на объект управления. При этом высокочастотные возмуще-
23
ния, исходящие от изменения исходных свойств сырья, материалов и энер-
гии, компенсируются нижними уровнями. Задачи верхних уровней низкочас-
Матричные системы управления
уровень задач
методы решения
реализующие программы
команды
операции
функции
уставки
Рисунок 2.4 – Стратификация матричных систем
тотного управления решают в терминах статической оптимизации, и при
этом компенсируются возмущения скачкообразного типа, источниками кото-
рых являются изменения условий поставок сырья и отгрузки продукции,
ремонтно-восстановительные работы на оборудовании и так далее /13/.
2) По числу уровней в дереве задающих блоков система может быть од-
ноуровневой и многоуровневой. При этом, как рассмотрено в /2/, можно вы-
делить четыре подтипа таких систем, а именно одноуровневые одноцелевые,
одноуровневые многоцелевые, многоуровневые одноцелевые и многоуровне-
вые многоцелевые. В первом случае примером могут служить одинаковые
сборочные автоматы в гибкой производственной системе. Во втором – не-
сколько людей одного уровня управления. Главной особенностью здесь явля-
ется отсутствие конфликтов внутри системы.
Система, принадлежащая к классу многоуровневых одноцелевых, имеет
несколько субъектов с собственными целями, которые не обязательно кон-
фликтны и подчинены единой цели управления. Наконец, класс многоуров-
невых многоцелевых систем характеризуется наличием иерархических от-
ношений между субъектами каждого уровня принятия решений.
Продолжение классификации проводится по признакам, связанным с
24
метасистемностью.
3) По количеству источников управляющего воздействия многоуровне-
вая система может быть с общим источником или с независимыми источни-
ками. Примером последней может быть автоматическая линия, в которой
присутствуют операции механической сборки, сварки, склейки и так далее. В
этом случае источники управляющих воздействий в ветвях управления, свя-
занных с указанными операциями, различны.
4) По количеству исполнительных устройств, входящих в многоуров-
невую систему, можно выделить системы с общим или с независимыми ис-
полнительными устройствами. Системы последнего вида в теории управле-
ния названы многомерными, многокоординатными или многоканальны-
ми. Если при этом связь между воздействиями по координатам достаточно
сильна, то систему называют многосвязной. Одним исполнительным уст-
ройством у нескольких линий предварительной подсборки может служить
сложный сборочный робот.
5) По алгоритму работы задающих блоков (по процедурам замены)
многоуровневые системы можно поделить на системы с параллельной (одно-
временной) работой, с последовательной (программной или цепной) работой
и с произвольным выбором задающих блоков в зависимости от создавшихся
условий. Примером первой системы может служить агрегатная автоматиче-
ская линия, ко второму типу систем можно отнести технологический про-
цесс, осуществляемый на многооперационном сборочном автомате. Наконец,
к третьему типу систем относятся все системы сортировки деталей перед
сборкой.
Пользуясь предложенным выше двухпроцессным подходом к управле-
нию, можно ввести более тонкую классификацию. При этом первый процесс
– ведущий, играет роль источника возникновения управленческих ситуаций,
а второй процесс, разворачивающийся внутри матричной системы, является
реакцией на первый. В зависимости от способа порождения управленческой
ситуации и ответа на нее – вероятностного или детерминированного, воз-
можны четыре класса систем.
Детерминированное порождение и детерминированная реакция возмож-
ны при работе полных автоматов. В автоматической линии, например, зара-
нее известно, в каком бункере какая деталь имеется, и алгоритм сборки из
этих деталей также детерминированный.
Вероятностное (случайное) порождение в сочетании с детерминирован-
ной реакцией приводит в зависимости от фиксированной или переменной
(переключаемой) внутренней структуры к системам массового обслуживания
или к системам с переменной структурой.
Наконец, вероятностная реакция на детерминированную или вероятно-
стную управленческую ситуацию порождает еще два класса систем, связан-
ных с работой классифицирующих систем в режиме обучения и контроля (то
есть в рабочем режиме классификации).
Последние три класса объединены за счет общей теории систем случай-
ной структуры.
25
Ввиду значительной изученности первых двух классов, в данной работе
исследуются системы, принадлежащие к последним двум классам. Дальней-
шее уточнение классификации по обсуждаемому признаку (по процедуре за-
мены) включает классификацию, рассмотренную в работе /14/.
Подводя итог исследованию классификации, видим, что выделение мат-
ричности систем управления позволяет провести классификацию в двух вза-
имно независимых направлениях: метасистемности и иерархичности, что ес-
тественно отражается на четкости выделяемых классов. Однако матрица,
представляющая сложную систему управления, может быть и многомерной.
Для этого достаточно дополнительно классифицировать задающие блоки на
всех уровнях. Например, ввести классификацию задач по их физической
сущности (или какому-либо другому признаку). В таком случае появится
плоскость задач (или даже пространство n измерений), плоскость методов,
плоскость программ и так далее.
Конечно, матричные системы можно классифицировать по классиче-
ским признакам: по принципу управления, по типу объекта управления, по
виду полученной системы управления, по применяемой в исполнительном
устройстве энергии и так далее.
В заключение необходимо отметить, что матричность системы не связа-
на с какими-либо ее математическими свойствами, а лишь отражает ее внут-
реннее строение, относительную независимость иерархичности от метаси-
стемности, уровней иерархии - друг от друга, так же как и составляющих
систем друг от друга. Это свойство позволяет достаточно просто отлаживать,
диагностировать, модернизировать такие системы
2.3 Подсистема распознавания образов
Проведенная выше классификация матричных систем по уровням позво-
ляет разделить задачу распознавания управленческой ситуации на ряд эта-
пов, на каждом из которых анализируется своя специфичная информация.
Рассмотрим эту специфику на примере обобщенной гибкой производст-
венной системы. На первом этапе при выборе задачи анализируется состоя-
ние рынка с целью выявления ассортимента продукции, реализующейся с
максимальной прибылью по имеющейся себестоимости.
На втором этапе осуществляется выбор технологии изготовления
выявленного ассортимента продукции. При этом анализируются запасы
сырья, инструмента, наличие квалифицированного персонала и так далее.
На третьем этапе выбирается конкретная программа работы оборудова-
ния в зависимости от его исходного состояния, наличия в нем инструментов
и приспособлений. В дальнейшем программа выбирает команды, в которые
обычно уже заложены проводимые операции, реализуемые функции и техно-
логические режимы исполнения. На последних этапах возрастает роль ло-
кальных обратных связей при принятии управленческих решений и снижает-
ся роль опережающего управления. Кроме того, на верхних уровнях можно
применять медленно действующие, но более точные методы принятия реше-
26
ний, тогда как на нижних уровнях все наоборот.
Таким образом, на разных уровнях иерархии при распознавании и при-
нятии управленческого решения анализируется разная информация, исполь-
зуются соответственно различные признаки распознавания.
Под управленческой ситуацией здесь понимается /15/ совокупность всех
сведений о состоянии объекта управления и внешней среды, достаточных для
принятия управленческого решения (то есть включения определенной
структуры адекватной данной управленческой ситуации).
Формальная постановка задачи распознавания состоит в следующем
/10/. Пусть задано множество объектов или явлений
{}
z
ω
ω
,...,
1
=
Ω
(алфавит
классов), а также множество возможных управлений (стратегий)
L={l
1
,…, l
k
},
которые могут быть приняты по результатам решения задачи распознавания,
и на основании которых множество
Ω
разбито на m непересекающихся клас-
сов
A
p
, где p=1,…, m. Известны значения признаков, которыми характеризу-
ются управленческие ситуации, относящиеся к соответствующим классам
(связанным с необходимостью включения определенных структур), обра-
зующие априорный словарь признаков. Обозначим через
j
pk
x - значения j-го
признака
k-го объекта p-го класса, j=1,…, n; k=1,…, k
p
. Горелик А.Л. ввел в
рассмотрение величины
()
()
∑∑∑
−=Ω
===
−
pp
k
k
k
l
n
j
j
pl
j
pk
j
pp
p
xx
kk
S
111
2
1
11
λ
(2.1)
и
()
()
∑∑∑
−=ΩΩ
===
p
k
k
k
l
n
j
j
ql
j
pk
j
qp
qp
xx
kk
R
111
2
1
11
,
λ
, (2.2)
которые назвал соответственно среднеквадратичным разбросом объектов
внутри класса
p
Ω и среднеквадратичным разбросом объектов классов
p
Ω
и
q
Ω ;
j
λ
представляют собой компоненты вектора
{
}
n
λλλ
,...,
1
= и принимают
значения 1 или 0 в зависимости от того, используется ли данный признак
априорного словаря в рабочем словаре.
Наиболее общим предположением относительно затрат ресурсов на раз-
работку измерительных средств системы распознавания является предполо-
жение относительно аддитивности расходов ресурсов, то есть
()
∑
==
=
n
j
jjn
CCC
1
1
...,
λλλ
, (2.3)
где C
j
– затраты на создание технического средства, предназначенного
для определения j-го признака.
Пусть на разработку измерительных средств системы выделены ресур-
сы, величина которых равна C
0
. Если
∑
≥
=
n
j
jj
CC
1
0
λ
, то представляется воз-
можность в полном объеме реализовать априорный словарь признаков. Од-
27
нако, если
∑
<
=
n
j
jj
CC
1
0
λ
, то возникает задача разработки такого словаря при-
знаков, который в условиях указанных ограничений обеспечивает наиболь-
шее значение показателя эффективности проектируемой системы распозна-
вания. В качестве критерия эффективности в общем случае Горелик А.Л.
предлагает использовать величину
(
)
(
)
(
)
qpqp
SSRF ΩΩΩΩ= /,
2
(2.4),
которая характеризует отношение расстояний между классами к разбросам
объектов внутри классов. Максимизировать отношение можно за счет умень-
шения знаменателя, который связан с точностью измерений признаков. Этого
же можно добиться увеличением числителя, который зависит от расстояния
между классами и определяется информативностью используемых призна-
ков.
Многие свойства объектов по своей физической природе являются не-
прерывными и многомерными. Для классификации объектов неприемлемо
измерение этих свойств во всем диапазоне изменения, тем более, что на
больших участках эти свойства могут совпадать для объектов разных клас-
сов. Возникает проблема выбора точечных значений свойств, используемых
в качестве признаков для максимально точной классификации.
Ситуацию, описанную выше, рассмотрим в отношении спектральной
плотности мощности (СПМ) видеоизображения различных дефектов ткани.
Прежде чем применять рассмотренную далее методику /16, 17/, важно опре-
делиться с эталонами классов дефектов, то есть наиболее характерными
представителями этих классов. Обычно это несложно сделать с помощью
экспертного метода.
Пусть экспериментальным образом определены двумерные спектраль-
ные плотности мощности для эталонов G
II
эi
(ω
x
,ω
y
), где i = 1,…,N (N - количе-
ство классов, учитываемых стандартом /18/). Сформируем все возможные
парные сочетания и пронумеруем все пары из N классов, вводя индекс r =
1,…,k, где k = N*(N-1)/2 - равно числу сочетаний из N по 2. Найдем модули
разностей двумерных спектральных плотностей мощностей сформированных
пар:
G
II
r
(ω
x,
ω
y
) = | G
II
эi
(ω
x,
ω
y
) - G
II
эj
(ω
x,
ω
y
)|, где i ≠ j,
i,j = 1,…,N; r = 1,…,k . (2.5)
Просуммируем эти выражения по всем парам дефектов и по всему диа-
пазону изменения:
k
ℜ(ω
x
,ω
y
) = ∑G
II
r
(ω
x
,ω
y
) . (2.6)
r=1
Образованная суммарная поверхность ℜ будет иметь впадины и возвы-
шения, несущие информацию о суммарном расстоянии между классами де-
фектов. Наиболее высокие точки этой поверхности будут самыми перспек-
тивными для использования в качестве признаков при классификации. Одна-
ко большие значения суммарного расстояния могут быть обусловлены значи-

28
тельным удалением лишь одного или нескольких дефектов от остальной
группы. Признаки, основанные на таких значениях, будут хорошо выделять
только эти несколько дефектов и будут "слепы" для остальных. Для исклю-
чения таких значений введем дополнительную процедуру.
В точках больших значений суммарной разности СПМ определим сред-
нее расстояние между классами L
m
:
ΣG
II
r
(ω
x
m
,ω
y
m
)
L
m
(ω
x
m
,ω
y
m
) = -------------------, m = 1,…,S , (2.7)
k
где ω
x
m
,ω
y
m
- частоты с большим суммарным значением двумерной спек-
тральной плотности мощности на суммарной поверхности,
S - количество больших значений, принятых во внимание.
Введем в рассмотрение относительную разность значений СПМ между
классами, которая будет уже безразмерной величиной:
G
II
r
(ω
x
m
,ω
y
m
)
L
m
r
(ω
x
m
,ω
y
m
) = -------------------, r = 1,…,k . (2.8)
L
m
(ω
x
m
,ω
y
m
)
Если теперь строить гистограмму этой разности для каждого значения
суммарной разности, принятого за перспективное для использования в ка-
честве признака, она будет иметь вид I или II, как изображено на рисунке 2.5.
Кривая 1 - гистограмма селективного фильтра
кривая 2 - гистограмма универсального фильтра.
0
1
Относительная разность
Количество
2
1
Рисунок 2.5 – Гистограмма суммарных разностей
Вид гистограммы II означает, что в данной сумме основной вклад имеют
разности, большие среднего расстояния между классами, а оставшиеся раз-
ности меньше среднего. То есть хорошо будут классифицироваться лишь
один или несколько дефектов. Таким образом, анализ гистограмм позволяет
выделить значения частот, на которых классификация дефектов будет осуще-
ствляться примерно с одинаковой точностью (можно назвать признаки, осно-
29
ванные на значениях двумерной СПМ для этих частот, универсальными, в
противоположность этому, признаки, основанные на значениях СПМ для
частот, гистограмма суммарной разности для которых имеет вид II – селек-
тивными).
Хотя данная методика является работоспособной, ее можно значительно
упростить. Построим для этого матрицу разностей двумерной СПМ для всех
эталонов дефектов (верхний индекс указывает номера эталонов):
G
II
11
G
II
12
G
II
13
… G
II
1N
G
II
21
G
II
22
G
II
23
… G
II
2N
……………………….. (2.9)
G
II
N1
G
II
N2
G
II
N3
… G
II
NN
.
Эта матрица имеет нулевую диагональ, относительно которой она симмет-
рична. Отсюда понятно, что в суммарной разности должны присутствовать
только наддиагональные компоненты, что более чем в два раза уменьшит ко-
личество слагаемых.
Кроме упрощения, интересен вопрос о выборе такого набора селектив-
ных признаков, которые, взаимно дополняя друг друга, образуют систему
классификации более точную, чем та, что построена на основе универсаль-
ных признаков.
Открытым остался вопрос о количестве универсальных признаков, при-
нимаемых во внимание при классификации, если конечно их больше одного.
Этот вопрос напрямую связан, с одной стороны, с точностью классификации,
с другой, как показано выше, с затратами на измерение признаков, оптимиза-
ция набора которых рассмотрена выше. Если выделенные средства позволя-
ют, то можно организовать дополнительную процедуру измерения размыто-
сти каждого из классов во всех найденных точках, а затем, воспользовавшись
формулой (2.4), выбрать наиболее эффективное значение признака, максими-
зирующего критерий Горелика, еще и за счет уменьшения знаменателя.
2.4 Конечноавтоматная модель матричной системы
Дискретность матричных систем, рассмотренная выше, наводит на
мысль использовать для выбора функционирующей в данный момент време-
ни структуры модель конечного автомата.
Конечный автомат, схема которого изображена на рисунке 2.5, пред-
ставляет собой дискретное устройство с n входами x
1
,…, x
n
и k выходами
y
1
,…, y
k
/19, 20/. Он может иметь s обратных связей, каждая из которых име-
ет задержку в виде элемента памяти (ЭП). Часть устройства, в которой сосре-
доточены элементы, реализующие контактные соединения и операции алгеб-
ры логики И, ИЛИ, НЕ и другие, образующие однотактную схему, принято
называть логическим преобразователем (ЛП) устройства.
На входы ЭП воздействуют сигналы, снимаемые с дополнительных
(внутренних) выходов ЛП y
k+1
,…, y
k+s
. С выходов ЭП сигналы воздействуют
на дополнительные (внутренние) входы ЛП x
n+1
,…, x
n+s
.

30
Каждый из входных сигналов может принимать значения из некоторого
множества, чаще всего конечного. Говорят, что i-й набор значений входных
сигналов, воздействующих на основные входы ЛП, образует состояние входа
- ρ
i
. При конечном множестве значений каждого входа множество состояний
входа тоже конечно X = {ρ
1
,…, ρ
N
}. Аналогично имеет место состояние вы-
хода в виде множества Y= {λ
1
,…, λ
K
} и внутреннее состояние S={ν
0
,…, ν
S-1
}.
Конечным автоматом называется /19/ упорядоченная пятерка
А = ‹ X, S, Y, S
0
, h ›, (2.10)
где S
0
⊆ S – множество начальных состояний,
h – отображение (функция выходов):
S×X → 2
S×Y
,
(2.11)
где использовано обозначение для множества всех подмножеств М в ви-
де 2
М
.
Кроме функции выходов, существует функция переходов φ:
S×X → 2
S
(2.12)
Через эти две функции определяют модель автомата Мили и Мура.
Модель Мили описывается функцией переходов
ν (t+1) = φ[ρ(t), ν(t)]
и функцией выходов
λ(t) = h[ρ(t), ν(t)]. (2.13)
Модель Мура описывается функцией переходов (2.11) и функцией вы-
ходов
λ(t) = h[ν(t)]. (2.14)
При этом автомат Мура может рассматриваться как частный случай ав-
томата Мили.
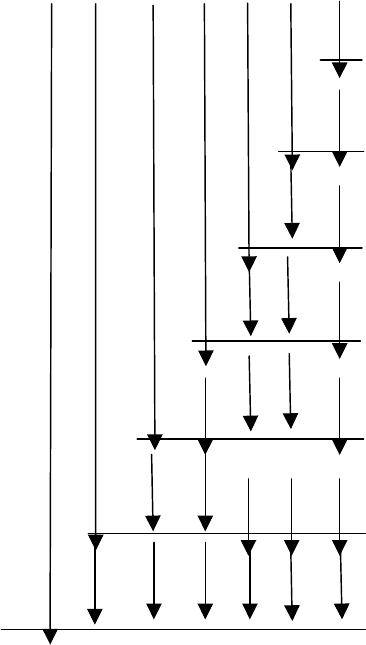
Применительно к матричным системам управления, необходимо вы-
строить иерархию конечных автоматов, в которой верхние уровни разрешают
или запрещают работу нижних уровней. Подобная схема изображена на ри-
сунке 2.6. Черная точка на схеме означает, что у каждого автомата, кроме ав-
томата самого верхнего уровня, имеется дополнительный вход, по которому
его работа может быть заблокирована автоматом более высокого уровня. Го-
ризонтальные параллельные линии, соединяющие вертикальные связи на
схеме, обозначают, что автоматы (или локальные системы управления, име-
нуемые далее для краткости регуляторы) включаются одновременно и рабо-
тают параллельно. Таким образом, автоматы всех уровней, кроме самого
нижнего, управляют работой автоматов более низкого уровня в соответствии
с состояниями их входов и заложенным в логический преобразователь алго-
ритмом. Самый нижний уровень управляет включением регуляторов (ло-
кальных систем управления).
Конечноавтоматная модель матричной системы описывается неким дре-
вовидным /20/ конечным автоматом
{
}
n
AAAA ,...,,
21
=
(2.15)
или
{}
{
}
{
}
{
}{}{}{}
mn
PAPPAPAAPPAAA ...
5412231211221111
∨∨∨∧= , (2.16)