Руководство ООО Сименс, Расширенное программирование SINUMERIK 840D
Подождите немного. Документ загружается.

Другие функции
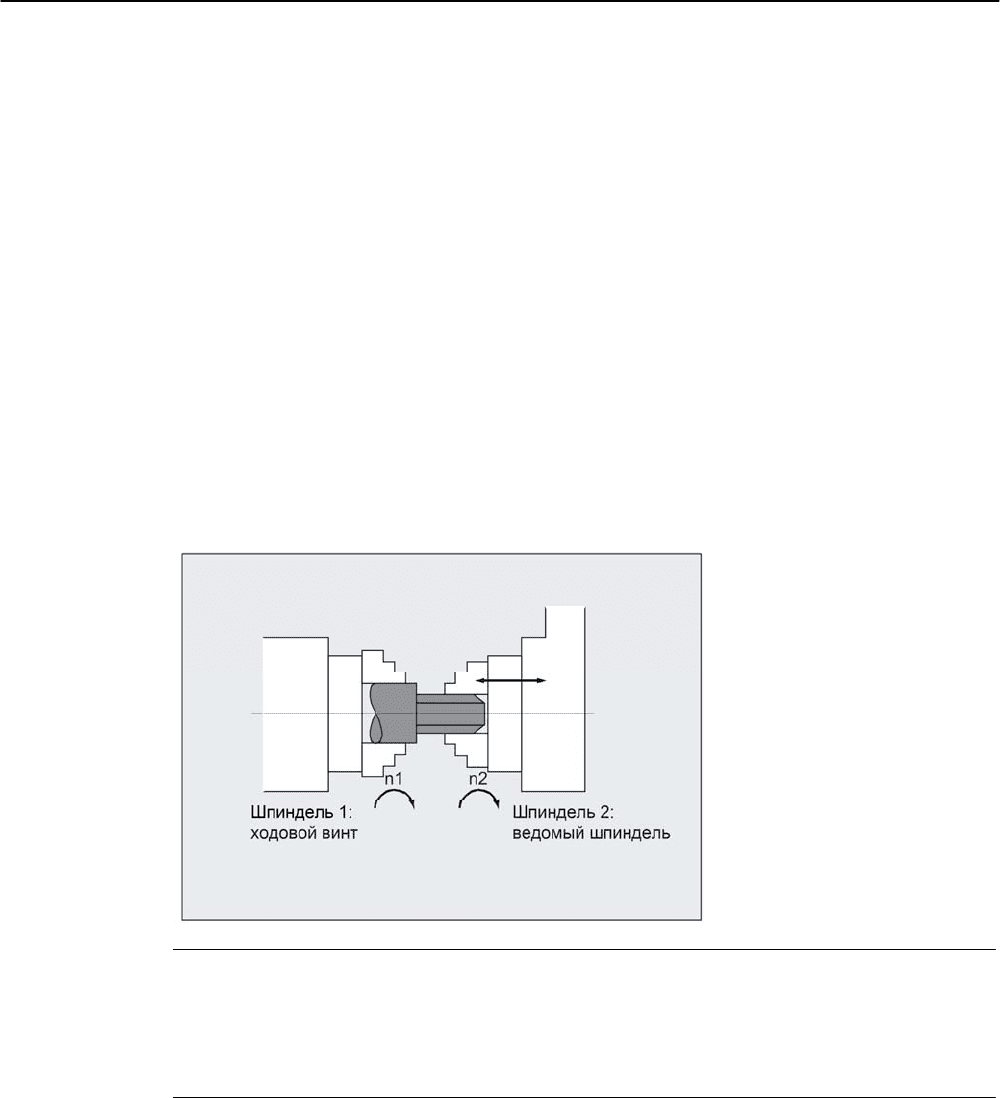
13.5 Синхронный шпиндель
Передаточное отношение
k
U
Передаточное отношение задается значениями для FS (числитель) и LS
(знаменатель).
Возможности:
• Ведомый шпиндель и ходовой винт вращаются с одинаковым числом оборотов (n
FS
=
n
LS
; k
U
положительное)
• Синхронный ход или противоход (k
U
отрицательное) между LS и FS
•
Ведомый шпиндель и ходовой винт вращаются с разным числом оборотов
(n
FS
= k
U
• n
LS
;k
U
≠
1)
Использование: многогранная токарная обработка
Пример:
N ... COUPDEF (S2, S1, 1.0, 4.0)
Означает: ведомый шпиндель S2 и ходовой винт S1 вращаются с передаточным
отношением 0.25.
Q
6SLQGHO
/HLWVSLQGHO
Q
6SLQGHO
)ROJHVSLQGHO
Указание
Как минимум, должен быть запрограммирован числитель. Если знаменатель не
указан, то он всегда принимается за "1".
Передаточное отношение может изменяться и при включенном соединении в движении.
Расширенное программирование
13-18 Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
Не для продажи
со станком

Другие функции
13.5 Синхронный шпиндель
Параметры смены кадра
NOC,
FINE,
COARSE,
IPOSTOP
Таким образом, при определении соединения можно выбирать между следующими
возможностями смены кадра:
"NOC" сразу же (предустановка)
"FINE" при "синхронном ходе точном"
"COARSE" при "синхронном ходе грубом"
"IPOSTOP" при IPOSTOP (т.е. после синхронного хода со стороны заданного значения)
Для указания параметров смены кадра достаточно написать выделенные жирным буквы.
Тип соединения DV, AV
Возможности:
"DV" соединение по заданному значению между FS и LS (предустановка)
"AV" соединение по фактическому значению между FS и LS
Осторожно
Изменение типа соединения разрешено только при отключенном соединении!
Включение синхронного режима
COUPON, POS
FS
• Макс. быстрое включение соединения с любой угловой корреляцией между LS
и FS:
N ... COUPON(S2, S1)или
N ... COUPON(S2, S1, POS
FS
)или
N ... COUPON(S2)
• Включение с угловым смещением POS
FS
Синхронное с позиций соединение для фасонных деталей.
POS
FS
относится к позиции 0° ходового винта в положительном направлении
вращения
Диапазон значений POS
FS
: 0°… 359,999°:
COUPON(S2, S1, 30)
Таким образом, угловое смещение может быть изменено и при активированном
соединении.
Позиционирование ведомого шпинделя
При включенном соединении синхронных шпинделей и ведомые шпиндели могут быть
позиционированы независимо от запущенного ходовом винтом движения в диапазоне
±
180°.
Расширенное программирование
Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
13-19
Не для продажи
со станком
Другие функции
13.5 Синхронный шпиндель
Позиционирование SPOS
Интерполяция ведомого шпинделя возможна со SPOS = .... Подробности по
SPOS см. руководство по программированию Основы.
Пример:
N30 SPOS[2] = IC(-90)
Дифференциальное число оборотов M3
S...
или M4
S...
Дифференциальное число оборотов возникает из-за наложения двух источников числа
оборотов с учетом знака и заново программируется для ведомого шпинделя, к примеру, с
Sn=... или Mn=3, Mn=4 в режиме управления числом оборотов при активном соединении
синхронных шпинделей. При этом данный компонент числа оборотов отводится через
коэффициент связи от ходового винта и прибавляется к
ведомому шпинделю с
правильным знаком.
Указание
Вместе с направлением вращения M3 или M4 заново необходимо запрограммировать и
число оборотов S..., иначе последует сообщение об отсутствующем программировании.
Прочую информацию по дифф. числу оборотов см.
Литература: /FB2/ Описание функций Расширенные функции; синхронный шпиндель (S3).
Дифференциальное число оборотов при
COUPONC
Передача движения к дифференциальному числу оборотов
При включении синхронного соединения с COUPONC происходит наложение предшествующего
программирования M3 S... или M4 S... ведомого шпинделя. Таким образом, после включения
соединения запрограммированное прежде в отдельном кадре число оборотов шпинделя
сохраняется. Дифференциальное число оборотов применяется сразу же.
Указание
Разрешение дифференциального числа оборотов
Установившееся дифференциальное число оборотов применяется только тогда, если
разрешено и наложение движения. В ином случае самоудаляющаяся ошибка
сигнализирует это недопустимое наложение.
Распределение динамики на имеющуюся динамику двигателя
Динамика ходового винта посредством программирования должна быть ограничена
настолько, чтобы другой компонент движения, к примеру, из-за дифференциального
числа оборотов, не слишком сильно повлиял на динамику ведомого шпинделя.
Расширенное программирование
13-20 Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
Не для продажи
со станком

Другие функции
13.5 Синхронный шпиндель
FA, ACC, OVRA, VELOLIMA: скорость, ускорение
С помощью FA[SPI] (Sn)] или FA[Sn], ACC[SPI(Sn)] или ACC[Sn] и
OVRA[SPI(n)] или OVRA[Sn], а также VELOLIMA[Sn] можно запрограммировать
скорости позиционирования и значения ускорения для ведомых шпинделей (см.
руководство по программированию Основы). "n" обозначает номер шпинделя 1...n.
Программируемые диапазоны значений для коррекции динамики ведомого шпинделя
Sn действуют для
• подачи для позиционирующих осей или шпинделей в режиме позиционирования
FA[Sn] = ... до 999 999,999 мм/мин или градусов/мин.
• процентной коррекции ускорения ACC[Sn] = 1 до 200%
• процентной коррекции подачи OVRA[Sn] = ... до 200%
• скоростного компонента VELOLIMA[Sn] = процентная коррекция макс. скорости от 1
до 100%
Указание
Компонент ускорения JERKLIMA[Sn]
Коррекция рывка хотя и может быть указана, но не влияет на шпиндели.
Прочие указания по конфигурированию программирования динамики через
машинные данные см. литературу: /FB2/ Описание функций Расширенные функции;
круговые оси (R2).
Программируемая смена кадра WAITC
С помощью WAITC для продолжения программы, к примеру, после изменения
параметров соединения или процессов позиционирования, можно определить
параметры смены кадра с различными условиями синхронного хода (грубый, точный,
IPOSTOP). При этом установка новых кадров задерживается до достижения условия
синхронного хода, благодаря чему синхронный ход может быть обработан быстрее.
Если условия синхронного хода
не указываются, то действуют
запрограммированные/сконфигурированные для соответствующего соединения
параметры смены кадра.
Примеры:
N200 WAITC
Ожидание условий синхронного хода для всех активных ведомых шпинделей без
указания условий синхронного хода.
N300 WAITC(S2, "FINE", S4, "COARSE")
Ожидание указанных условий синхронного хода "грубый" для ведомых шпинделей S2
и S4.
Расширенное программирование
Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
13-21
Не для продажи
со станком

Другие функции
13.5 Синхронный шпиндель
Отключение синхронного режима COUPOF
Имеется три варианта:
• макс. быстрое отключение соединения, смена кадра разрешается сразу же:
COUPOF(S2, S1)или
COUPOF(S2); без указания ходового винта
• после перехода позиций отключения; смена кадра разрешается только после
перехода позиций отключения
POS
FS
и, возможно, POS
LS
.
Диапазон значений 0°… 359,999°:
COUPOF(S2, S1, 150)
COUPOF(S2, S1, 150, 30)
Отключение соединения с остановкой ведомого шпинделя
COUPOFS
Имеется два варианта:
• макс. быстрое отключение соединения и стоп без указания позиции,
смена кадра разрешается сразу же:
COUPOFS(S2, S1)
• после перехода запрограммированной позиции отключения ведомой оси,
относящейся к системе координат станка, смена кадра разрешается только после
перехода позиций отключения
POS
FS
.
Диапазон значений 0°… 359,999°:
COUPOFS(S2, S1, POS
FS
)
Удаление соединения
COUPDEL
N ... COUPDEL(S2, S1)или
N ... COUPDEL(S2); без указания ходового винта
Действует на активное соединение синхронных шпинделей, отключает соединение и
удаляет данные соединения. Ведомый шпиндель принимает последнее число
оборотов и соответствует прежнему поведению COUPOF(FS, LS).
Сброс параметров соединения COUPRES
С помощью оператора языка "COUPRES"
• активируются зафиксированные в машинных и установочных данных параметры
(фиксировано сконфигурированное соединение),
• активируются предустановки (определенное пользователем соединение).
При этом запрограммированные с COUPDEF параметры (включая
передаточное отношение) теряются.
N ... COUPRES(S2, S1)или
N ... COUPRES(S2); без указания ходового винта
S2 = ведомый шпиндель, S1 = ходовой винт
Расширенное программирование
13-22 Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
Не для продажи
со станком

Другие функции
13.5 Синхронный шпиндель
Системные
переменные
Актуальное состояние соединения ведомого шпинделя
Актуальное состояние соединения для ведомого шпинделя может быть считано
в программе обработки детали ЧПУ с помощью следующей осевой системной
переменной:
$AA_COUP_ACT[FS]
FS = идентификатор оси для ведомого шпинделя, к примеру, S2.
Считанное значение для ведомого шпинделя:
0: нет активного соединения
4: активно соединение синхронных шпинделей
Актуальное угловое смещение
Актуальное смещение позиции со стороны заданного значения для ведомого шпинделя
может быть считано в программе обработки детали ЧПУ с помощью следующей осевой
системной переменной:
$AA_COUP_OFFS[S2]
Смещение позиции со стороны фактического значения может быть считано с:
$VA_COUP_OFFS[S2]
FS = идентификатор оси для ведомого шпинделя, к примеру, S2.
Указание
После отмены разрешения регулятора при включенном соединении и режиме слежения
после повторного получения разрешения регулятора устанавливается иное смещение
позиции, отличное от первоначально запрограммированного значения. В этом случае
измененное смещение позиции может быть считано и при необходимости исправлено в
программе обработки детали ЧПУ.
Расширенное программирование
Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
13-23
Не для продажи
со станком

Другие функции
13.6 Электронный редуктор (EG)
13.6
Электронный редуктор (EG)
Функция
С помощью функции "Электронный редуктор" можно управлять движением ведомой оси
по линейному кадру движения в зависимости от макс. пяти ведущих осей. Связи между
ведущими осями и ведомой осью определены через коэффициент связи для каждой
ведущей оси.
Вычисленный компонент движения ведомой оси образуется посредством сложения из
компонентов движения отдельных ведущих осей, умноженных на соответствующие
коэффициенты связи.
При активизации структуры осей электронного редуктора может быть запущена
синхронизация ведомой оси на определенную позицию. Из программы обработки
детали структура редуктора может:
• определяться,
• включаться,
• отключаться,
• удаляться.
Движение ведомой оси может следовать по выбору из
• заданных значений ведущих осей, а также
• фактических значений ведущих осей.
В качестве расширения возможна реализация и нелинейных связей между ведущими
осями и ведомой осью через таблицы кривых (см. главу Параметры траектории).
Возможно каскадирование электронных редукторов, т.е. ведомая ось
одного электронного редуктора сожжет стать ведущей осью для следующего
электронного редуктора.
13.6.1 Определение электронного редуктора (EGDEF)
Функция
Структура осей электронного редуктора определяется через указание ведомой оси и
минимум одной и макс. пяти ведущих осей с соответствующим типом соединения:
EGDEF (ведомая ось, ведущая ось 1, тип соединения1, ведущая ось 2, тип соединения
2,..).
Условие
Условие для определения структуры осей электронного редуктора: ведомая ось еще
не должна входить в определенное соединение осей (при необходимости сначала
удалить существующее посредством EGDEL).
Расширенное программирование
13-24 Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
Не для продажи
со станком

Другие функции
13.6 Электронный редуктор (EG)
Программирование
EGDEF(C, B, 1, Z, 1, Y, 1)
B, Z, Y влияют на C через заданное значение
Тип соединения не должен быть одинаковым для всех ведущих осей и поэтому
указывается отдельно для каждой ведущей оси. Коэффициенты связи при определении
структуры соединения электронного редуктора предустанавливаются на ноль.
Указание
EGDEF вызывает остановку предварительной обработки. Определение редуктора с
EGDEF и в этом случае может использоваться без изменений, когда
в системах одна или несколько ведущих осей через таблицу кривых воздействуют на
ведомую ось.
Параметры
EGDEF
Определение электронного редуктора
Ведомая ось
Ось, управляемая ведущими осями
Ведущая ось1,
...
ведущая ось5
Оси, управляющие ведомой осью
Тип соединения1,
...
тип соединения5
Ведомая ось управляется:
0:
фактическим значением
1:
заданным значением
соответствующей ведущей оси
13.6.2 Включение электронного редуктора (EGON)
Функция
Существует 3 варианта для команды включения.
Программирование
Вариант 1:
Включение структуры осей электронного редуктора по выбору без синхронизации с
помощью:
EGON(FA, "Режим смены кадра", LA1, Z1 ,N1, LA2, Z2, N2, ..LA5, Z5,N5)
Вариант 2:
Включение структуры осей электронного редуктора по выбору с синхронизацией с
помощью:
EGONSYN(FA, "Режим смены кадра", SynPosFA,[, LAi, SynPosLAi, Zi, Ni])
Вариант 3:
Включение структуры осей электронного редуктора по выбору с синхронизацией с
помощью: Режим подвода задается с:
EGONSYNE(FA, "Режим смены кадра", SynPosFA, режим подвода [,
LAi, SynPosLAi, Zi, Ni])
Расширенное программирование
Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
13-25
Не для продажи
со станком
Другие функции
13.6 Электронный редуктор (EG)
Параметры
Вариант 1:
FA:
Ведомая ось
Режим смены кадра
Возможно использование следующих режимов:
"NOC"
смена кадра происходит сразу же
"FINE"
смена кадра происходит при
"Синхронном ходе точном"
"COARSE"
смена кадра происходит при
"Синхронном ходе грубом"
"IPOSTOP"
смена кадра происходит при синхронном ходе со
стороны заданного значения
LA1,
...
LA5
Ведущие оси
Z1,
...
Z5
Числитель для коэффициента связи
i
N1,
...
N5
Знаменатель для коэффициента связи
i
Коэффициент связи
i
=
числитель
i/знаменатель
i
Могут быть запрограммированы только ведущие оси, предварительно специфицированные с
EGDEF. Должна быть запрограммирована минимум одна ведущая ось.
Вариант 2:
FA:
Ведомая ось
Режим смены кадра
Возможно использование следующих режимов:
"NOC"
Смена кадра происходит сразу же
"FINE"
смена кадра происходит при
"Синхронном ходе точном"
"COARSE"
смена кадра происходит при
"Синхронном ходе грубом"
"IPOSTOP"
смена кадра происходит при синхронном ходе со
стороны заданного значения
[,
LAi,
SynPosLAi,
Zi,
Ni]
(не записывать квадратные скобки
мин.
1,
макс.
5
последовательностей:
LA1,
...
LA5
ведущие оси
SynPosLAi
Синхронная позиция для ведущей оси
i.
Z1,
...
Z5
Числитель для коэффициента связи
i
N1,
...
N5
Знаменатель для коэффициента связи
i
Коэффициент связи
i
=
числитель
i/знаменатель
i
Могут быть запрограммированы только ведущие оси, предварительно
специфицированные с EGDEF. Через запрограммированные "синхронные позиции" для
ведомой оси (SynPosFA) и для ведущих осей (SynPosLA) определяются позиции, в
которых структура соединения считается синхронной. Если при включении
электронный редуктор находится не в синхронном состоянии, то ведомая ось
перемещается на свою синхронную позицию.
Вариант 3:
Параметры соответствуют таковым варианта 2, плюс:
Режим подвода
Возможно использование следующих режимов:
"NTGT":
оптимизированный по времени подвод к
следующей впадине между зубьями
"NTGP"
:
оптимизированный по пути подвод к следующей
впадине между зубьями
"ACN"
:
абсолютное перемещение круговой оси в
отрицательном направлении вращения
"ACP":
абсолютное перемещение круговой оси в
положительном направлении вращения
"DCT":
с оптимизацией по времени к запрограммированной
синхронной позиции
"DCP":
с оптимизацией по пути к запрограммированной
синхронной позиции
Расширенное программирование
13-26 Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
Не для продажи
со станком
Другие функции
13.6 Электронный редуктор (EG)
Вариант 3 влияет только на ведомые оси модуло, соединенные с ведущими осями
модуло.
Оптимизация по времени учитывает границы скорости ведомой оси.
Описание
Вариант 1:
Позиции ведущих осей, также ведомой оси, на момент включения сохраняются как
"Синхронные позиции". "Синхронные позиции" могут быть считаны посредством
системной переменной $AA_EG_SYN.
Вариант 2:
Если оси модуло находятся в структуре соединения, то их значения позиций
уменьшаются модуло. Тем самым обеспечивается подвод к следующей возможной
синхронной позиции (т.н.
относительная синхронизация
: к примеру, следующая впадина
между зубьями). Если для ведомой оси не подан сигнал "Разрешение наложения
ведомой оси", сигнал интерфейсов DB(30 +номер оси), DBX 26 бит 4, то движение на
синхронную позицию не выполняется. Вместо этого программа останавливается на
кадре EGONSYN и самоудаляющаяся ошибка 16771 сигнализируется до тех пор, пока
в.у. сигнал не будет установлен.
Вариант 3:
Расстояние между зубьями (градус) получается из: 360 * Zi/Ni. На тот случай, когда
ведомая ось на момент вызова остановлена, поведение оптимизации по пути идентично
оптимизации по времени.
В случае уже двигающейся ведомой оси при NTGP, независимо от актуальной
скорости ведомой оси, выполняется синхронизация на следующую впадину между
зубьями. В случае уже двигающейся ведомой оси при NTGТ, в зависимости от
актуальной скорости ведомой оси, выполняется синхронизация на следующую
впадину между зубьями. Для этого при необходимости выполняется и торможение
оси
.
Таблицы
кривых
Если для одной из линейных осей используется таблица кривых, то:
Ni Знаменатель коэффициента связи линейных соединений должен быть
установлен на 0. (знаменатель 0 был бы недопустим для линейных
соединений). Знаменатель ноль указывает СЧПУ на то, что
Zi должен быть интерпретирован как номер используемой таблицы кривых.
Таблица кривых с указанным номером на момент времени включения уже
должна быть определена.
LAi Указание ведущей оси соответствует указанию ведущей оси при
соединении через коэффициент связи (линейное соединение).
Прочие указания по использованию таблиц кривых и каскадированию
электронных редукторов и их синхронизации см.
/FB3/ Описание функций Специальные функции; соединения осей и ESR (M3), глава
"Буксировка и соединение по главному значению".
Расширенное программирование
Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
13-27
Не для продажи
со станком