Руководство ООО Сименс, Расширенное программирование SINUMERIK 840D
Подождите немного. Документ загружается.

Качание
11.2 Управляемое через синхронные действия качание
Обработка точки возврата в режиме Online
Если на правой стороне сравнения стоит обозначенная с $$ основная переменная
движения, то выполняется текущая обработка обоих переменных в такте IPO и их
сравнение друг с другом.
Указание
Подробности см. главу "Синхронные действия движения".
Повторный пуск маятникового движения
Это синхронное действие используется для того, чтобы продолжить движение
качающейся оси, если движение частичной подачи завершено.
С учетом приведенных выше допущений получаются следующие операторы:
WHENEVER $AA_DTEPW[X]==0 DO $AA_OVR[Z] = 100
Всегда когда
равен
тогда
Следующая
частичная подача
остаточный путь для частичной подачи оси подачи X в WСS
нулю,
установить осевую процентовку качающейся оси на
100%.
После выполненной подачи необходимо не допустить преждевременного запуска
следующей частичной подачи.
Для этого используется спец. для канала идентификатор ($AC_MARKER[индекс]),
который устанавливается в конце частичной подачи (частичный остаточный путь ≡ 0) и
удаляется при выходе из диапазона возврата.
После синхронное действие не допускает следующего движения подачи.
С учетом приведенных выше допущений, к примеру, для точки возврата 1 получаются
следующие операторы:
1. Установить идентификатор:
WHENEVER $AA_DTEPW[X]==0 DO $AC_MARKER[1] = 1
Всегда когда
равен
тогда
2. Удалить
идентификатор
остаточный путь для частичной подачи оси подачи X в WСS
нулю,
установить идентификатор с индексом 1 на 1.
WHENEVER $AA_IM[Z]<> $SA_OSCILL_RESERVE_POS1[Z] DO $AC_MARKER[1] =
0
Всегда когда
больше или меньше
тогда
актуальная позиция качающейся оси Z
в
MСS
чем позиция точки возврата 1,
установить идентификатор 1 на 0.
3. Недопущение подачи
WHENEVER $AC_MARKER[1]==1 DO $AA_OVR[X] = 0
Всегда когда
одинаковый
тогда
идентификатор 1
,
установить осевую процентовку оси подачи Х на 0%.
Расширенное программирование
11-12 Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
Не для продажи
со станком
Штамповка и вырубка
12
12.1
Активация, деактивация
12.1.1 Включение или выключение штамповки и вырубки (SPOF, SON,
PON, SONS, PONS, PDELAYON/OF)
Функция
Активировать/деактивировать штамповку и вырубку, PON/SON
С помощью PON и SON активируется функция штамповки и вырубки. SPOF
завершает все специфические для штамповки и вырубки функции. Действующие
модально команды PON и SON являются взаимоисключающими, т.е. PON
деактивирует SON и наоборот.
Штамповка и вырубка с предварительным натяжением, PONS/SONS
Функции SONS и PONS также включают функции штамповки или вырубки.
В отличие от управления ходом SON/PON на уровне интерполяции – в случае этих
функций осуществляется сигнально-техническое управление запуском хода на
сервоуровне. Благодаря этому работа может выполняться с увеличенной частотой
хода и тем самым с увеличенной производительностью штамповки.
При обработке сигнала в предварительном натяжении все функции, вызывающие
изменение позиций осей вырубки или штамповки, заблокированы.
Пример: перемещение маховичком, изменение фреймов через PLC, функции измерения.
Штамповка с задержкой, PDELAYON/PDELAYOF
PDELAYON вызывает вывод хода штамповки с задержкой. Действующая модально
команда имеет подготовленную функцию и тем самым, как правило, стоит перед
PON. После PDELAYOF продолжается обычная штамповка.
Расширенное программирование
Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
12-1
Не для продажи
со станком
Штамповка и вырубка
12.1 Активация, деактивация
Программирование
PONS G... X... Y... Z...
или
SON G... X... Y... Z...
или
SONS G... X... Y... Z...
или
SPOF
или
PDELAYON
или
PDELAYOF
или
PUNCHACC(S
min
,A
min
, S
max
, A
max
)
Параметры
PON
Штамповка вкл
PONS
Штамповка
с предварительным натяжением вкл
SON
Вырубка вкл
SONS
Вырубка с предварительным натяжением вкл
SPOF
Штамповка, вырубка выкл
PDELAYON
Штамповка с задержкой вкл
PDELAYOF
Штамповка с задержкой выкл
PUNCHACC
Контролируемое по пути ускорение
PUNCHACC
(S
min
,
A
min
,
S
max
,
A
max
)
"S
min
"
Наименьшее расстояние между отверстиями
"S
max
"
Наибольшее расстояние между отверстиями
"A
min
"
Начальное ускорение A
min
может быть больше, чем
A
max
"A
max
"
Конечное ускорение
A
max
может быть меньше, чем
A
min
Использование команд M
При использовании техники макросов вместо языковых команд можно использовать и
команды М:
DEFINE
M25
AS
PON
Штамповка вкл
DEFINE
M125
AS
PONS
Штамповка с предварительным натяжением вкл
DEFINE
M22
AS
SON
Вырубка вкл
DEFINE
M122
AS
SONS
Вырубка с предварительным натяжением вкл
DEFINE
M26
AS
PDELAYON
Штамповка с задержкой вкл
DEFINE
M20
AS
SPOF
Штамповка, вырубка выкл
DEFINE
M23
AS
SPOF
Штамповка, вырубка выкл
Расширенное программирование
12-2 Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
Не для продажи
со станком

Штамповка и вырубка
12.1 Активация, деактивация
Штамповка и вырубка с предварительным натяжением, PONS/SONS
Штамповка и вырубка с предварительным натяжением невозможна в нескольких каналах
одновременно. PONS
или SONS может быть активирована только в одном канале
соответственно.
Если PONS или SONS активируется более чем в одном канале одновременно, то
ошибка 2200 "Канал %1 быстрая штамповка/вырубка в нескольких каналах невозможна"
определяет эту запрещенную операцию.
В остальном PONS и SONS идентичны PON и SON.
Контролируемое по пути ускорение, PUNCHACC
Языковая команда PUNCHACC(S
min
,A
min
, S
max
, A
max
) устанавливает характеристику
ускорения, которая, в зависимости от расстояния между отверстиями
(S), определяет
различные ускорения (A).
Пример для PUNCHACC(2, 50, 10, 100):
Расстояния между отверстиями меньше 2 мм:
Движение выполняется с ускорением в 50% от макс. ускорения.
Расстояния между отверстиями от 2 мм до 10 мм:
Ускорение увеличивается пропорционально расстоянию до 100%.
Расстояния между отверстиями больше, чем 10 мм:
Движение с ускорением в 100%.
Расширенное программирование
Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
12-3
Не для продажи
со станком
Штамповка и вырубка
12.1 Активация, деактивация
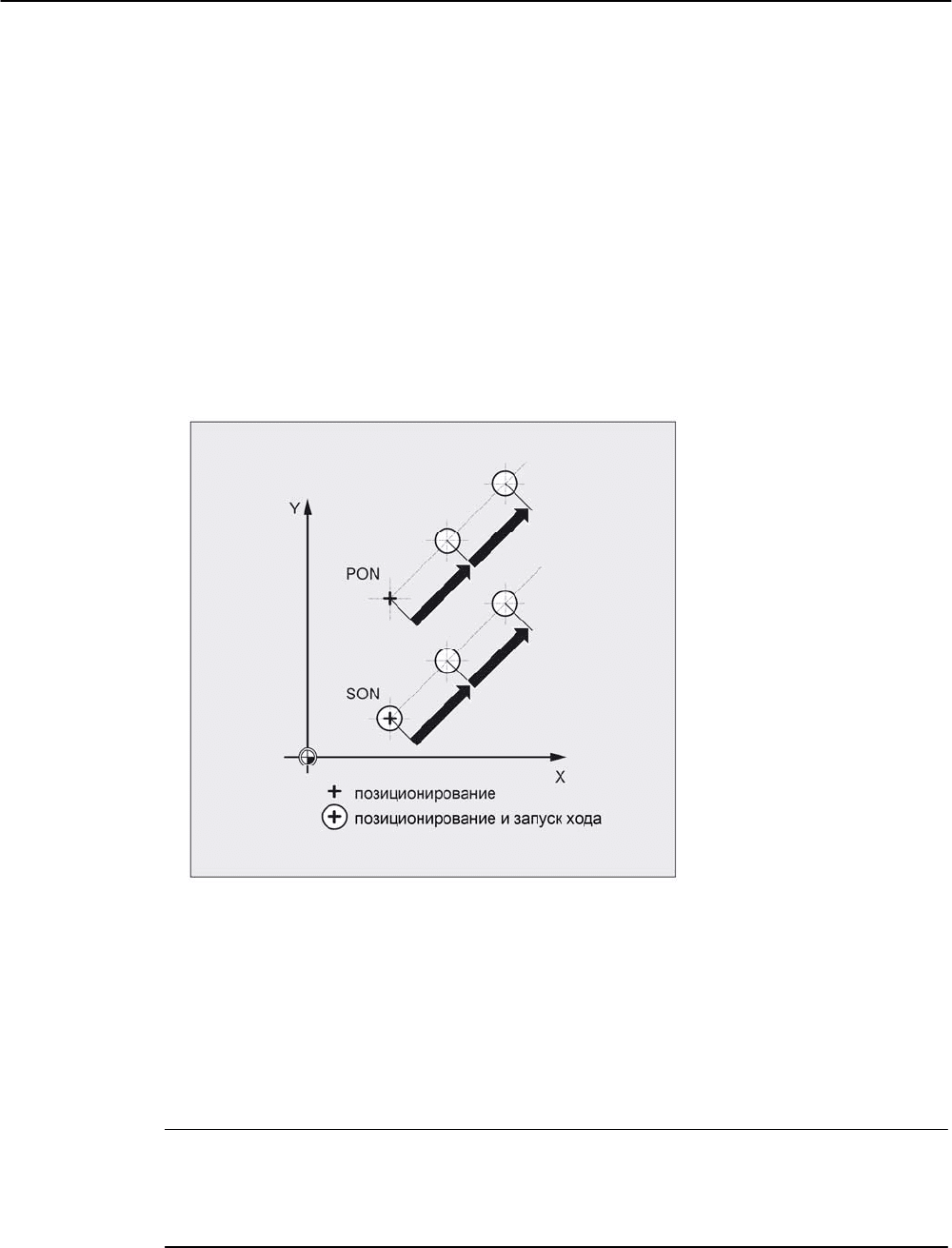
Запуск первого хода
Запуск первого хода после активизации функции осуществляется для вырубки и
штамповки различно по времени:
• PON/PONS:
– все ходы – включая ход первого кадра после активизации – осуществляются в
конце кадра.
• SON/SONS:
– первый ход после активизации вырубки осуществляется уже в начале кадра.
–
все последующие ходы соответственно запускаются в конце кадра
.
<
321
621
;
3RVLWLRQLHUHQ
3RVLWLRQLHUHQ
XQG +XEDXVO
?
VXQJ
Штамповка и вырубка на месте
Запуск хода осуществляется только тогда, когда кадр содержит информацию
перемещения для осей штамповки или вырубки (оси активной плоскости).
Для того, чтобы все же запустить ход на том же месте, необходимо запрограммировать
одну из осей штамповки/вырубки с путем перемещения 0.
Указание
Работа с вращающимися инструментами
Для тангенциального подвода вращающихся инструментов к запрограммированной
траектории необходимо использовать тангенциальное управление.
Расширенное программирование
12-4 Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
Не для продажи
со станком
Штамповка и вырубка
12.2 Автоматическая подготовка пути
12.2
Автоматическая подготовка пути
Функция
Разделение на участки пути
При активной штамповке или вырубке как SPP, так и SPN, вызывают разделение
запрограммированного для траекторных осей всего пути перемещения на
определенное количество участков пути одинаковой длины (эквидистантное
разделение пути). Внутренне каждый участок пути соответствует одному кадру.
Число ходов
При штамповке первый ход осуществляется в конечной точке первого участка пути,
при вырубке, напротив, в стартовой точке первого участка пути. Поэтому по всему
участку перемещения получаются следующие цифры:
Штамповка: число ходов = число участков пути
Вырубка: число ходов = число участков пути + 1
Вспомогательные функции
Вспомогательные функции выполняются в первом из созданных кадров.
Программирование
SPP=
или
SPN=
Параметры
SPP
Размер участка пути
(макс. интервал хода);
действует модально
SPN
Число участков пути на кадр;
действует покадрово
Расширенное программирование
Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
12-5
Не для продажи
со станком
Штамповка и вырубка
12.2 Автоматическая подготовка пути
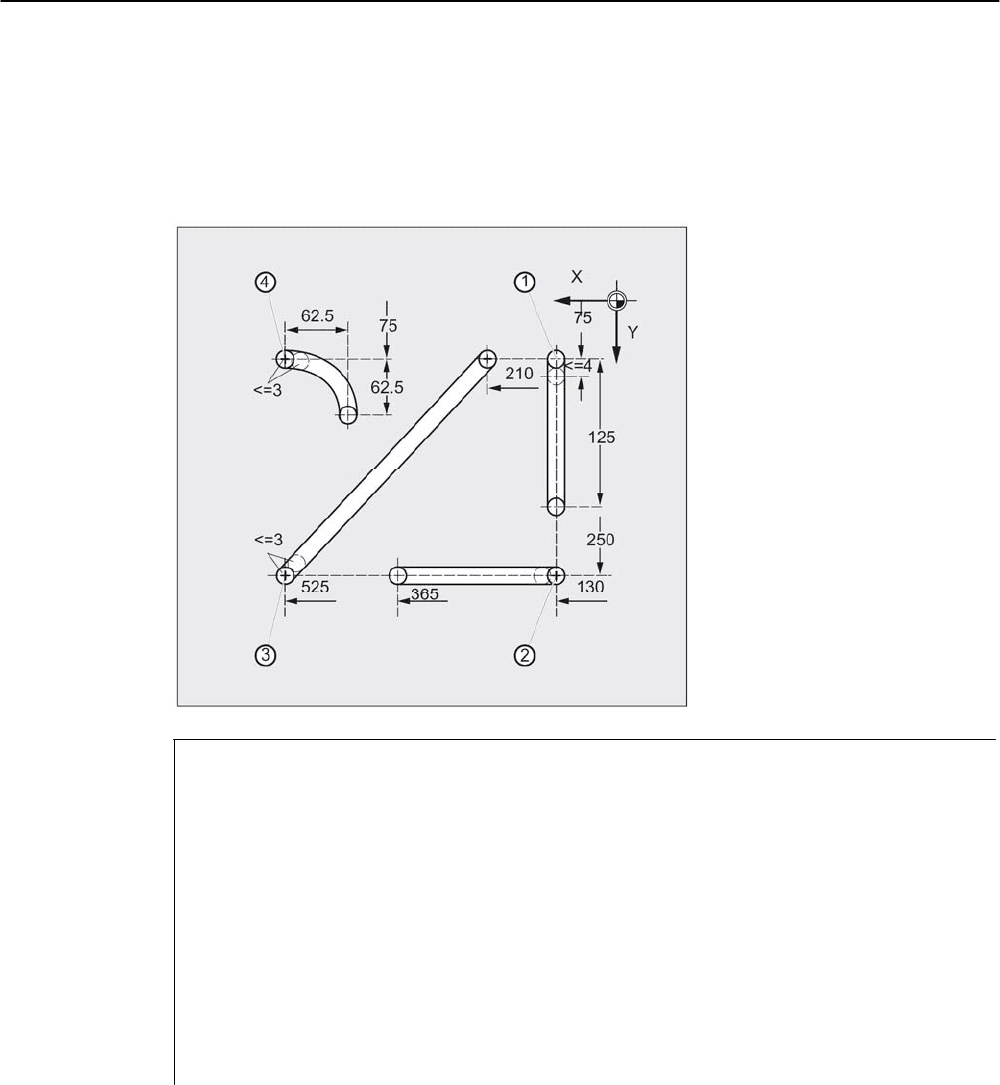
Пример 1
Запрограммированные участки вырубки должны быть автоматически разбиты на участки
пути одинакового размера.
;
<
N100
G90
X130
Y75
F60
SPOF
;позиционирование на точку старта
1
N110
G91
Y125
SPP=4
SON
;вырубка вкл;
макс. длина участка пути
;для автоматического разделения пути:
4
мм
N120
G90
Y250
SPOF
;вырубка выкл;
позиционирование на
;точку старта
2
N130
X365
SON
;вырубка вкл;
макс. длина участка пути
;для автоматического разделения пути:
4
мм
N140
X525
SPOF
;вырубка выкл;
позиционирование на
;точку старта
3
N150
X210
Y75
SPP=3
SON
;вырубка вкл;
макс. длина участка пути
;для автоматического разделения пути:
3
мм
N160
X525
SPOF
;вырубка выкл;
позиционирование на
;точку старта
4
N170
G02
X-62.5
Y62.5
I
J62.5
SPP=3
SON
;вырубка вкл;
макс. длина участка пути
;для автоматического разделения пути:
3
мм
N180
G00
G90
Y300
SPOF
;вырубка выкл
Расширенное программирование
12-6 Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
Не для продажи
со станком
Штамповка и вырубка
12.2 Автоматическая подготовка пути
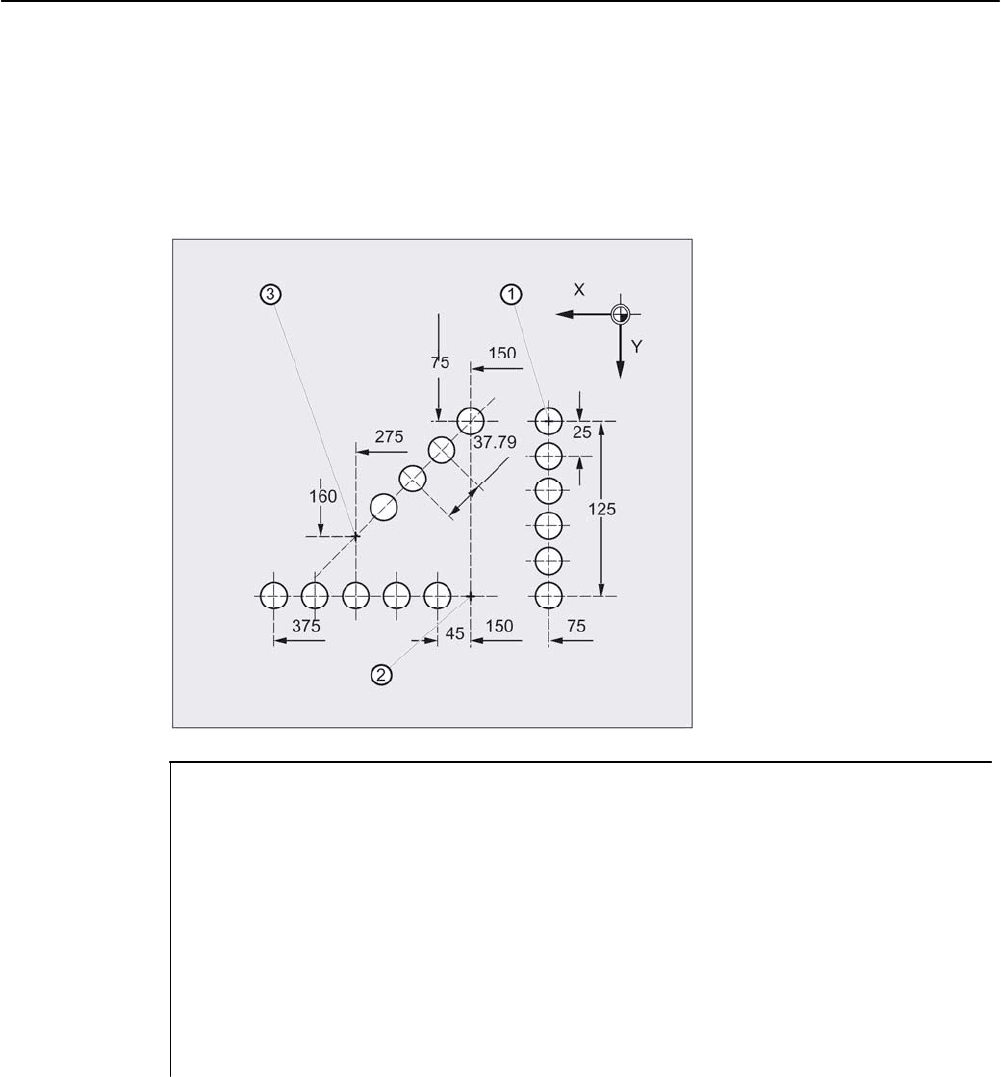
Пример 2
Для отдельных рядов отверстий должно быть выполнено автоматическое разделение
пути. Для разделения указывается макс. длина участка пути (значение SPP)
соответственно.
;
<
N100
G90
X75
Y75
F60
PON
;позиционирование на точку старта
1;
;штамповка вкл, штамповать отдельное отверстие
N110
G91
Y125
SPP=25
;макс. длина участка пути для
;автоматического разделения пути:
25
мм
N120
G90
X150
SPOF
;штамповка выкл;
позиционирование на
;точку старта
2
N130
X375
SPP=45
PON
;штамповка вкл;
макс. длина участка пути
;для автоматического разделения пути:
45
мм
N140
X275
Y160
SPOF
;штамповка выкл;
позиционирование на
;точку старта
3
N150
X150
Y75
SPP=40
PON
;штамповка вкл;
вместо запрограммированной
;длина участка пути в 40 мм используется
;вычисленная длина участка пути в
;37,79
мм.
N160
G00
Y300
SPOF
;штамповка выкл;
позиционирование
Расширенное программирование
Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
12-7
Не для продажи
со станком
Штамповка и вырубка
12.2 Автоматическая подготовка пути
12.2.1 Разделение пути для траекторных осей
Длина участка пути SPP
С помощью SPP задается макс. интервал хода и тем самым макс. длина участков пути,
на которые должен быть разделен весь участок пути. Отключение команды
осуществляется с SPOF или SPP=0.
Пример:
N10 SON X0 Y0
N20 SPP=2 X10
Весь участок пути в 10 мм делится на 5 участков пути по 2 мм каждый (SPP=2).
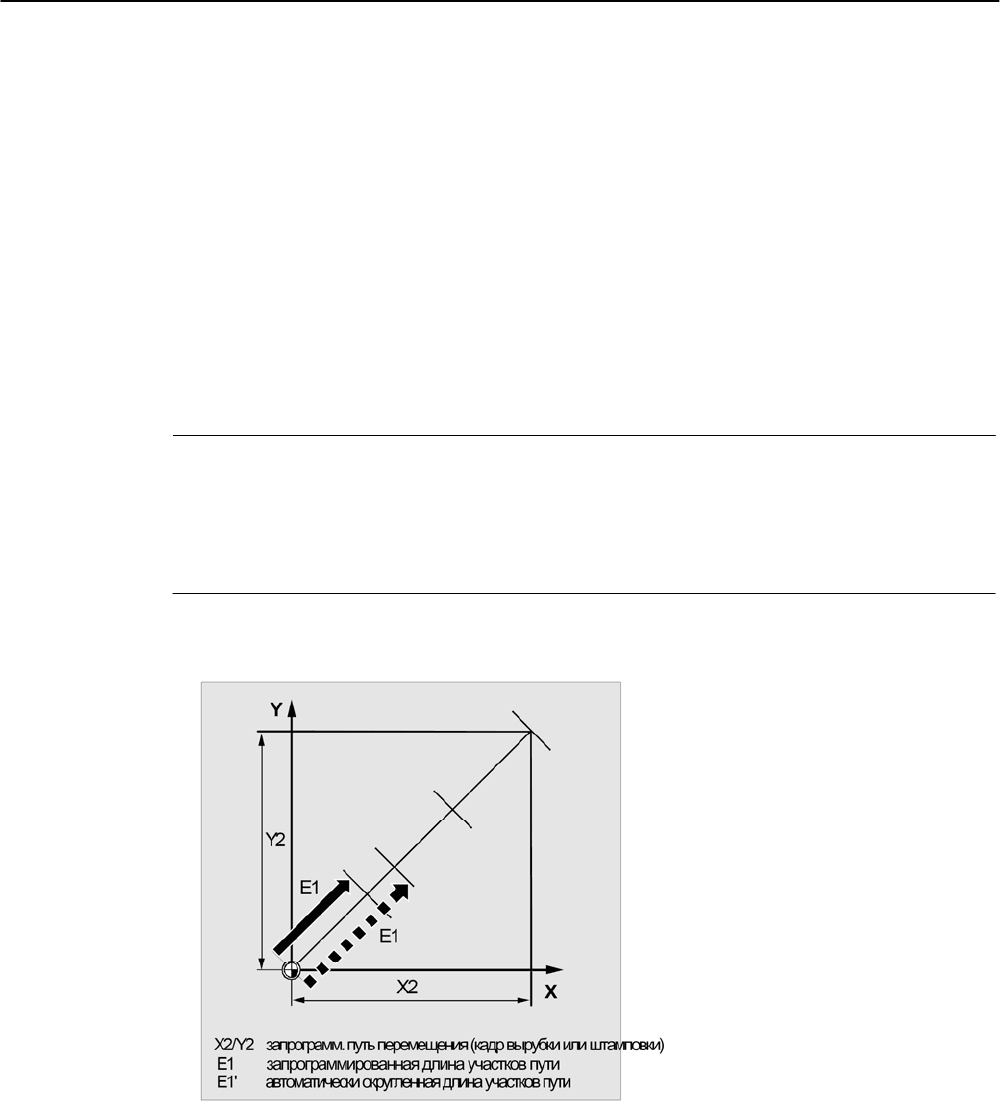
Указание
Разделение пути с SPP всегда выполняется эквидистантно: все участки пути имеют
одинаковую длину. Это означает, что запрограммированное значение участков пути
(значение SPP) действительно только тогда, когда коэффициент из всего участка пути и
значения SPP является целочисленным. Если это не так, то размер участков пути
уменьшается таким образом, чтобы получился целочисленный коэффициент.
<
<
(
(
;
;
;
<
3URJUDPPLHUWHU
9HUIDKUZHJ
1LEEHO
RGHU
6WDQ]VDW]
(
3URJUDPPLHUWH
7HLOVWUHFNHQO
¦
QJH
(
$XWRPDWLVFK
DEJHUXQGHWH
7HLOVWUHFNHQO
¦
QJH
Расширенное программирование
12-8 Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
Не для продажи
со станком
Штамповка и вырубка
12.2 Автоматическая подготовка пути
Пример:
N10 G1 G91 SON X10 Y10
N20 SPP=3.5 X15 Y15
При общей длине пути в 15 мм и длине участка пути в 3,5 мм получается
не целочисленный коэффициент (4.28). Поэтому выполняется уменьшение значения
SPP до следующего возможного целочисленного коэффициента. В этом случае
получается длина участка пути в 3 мм.
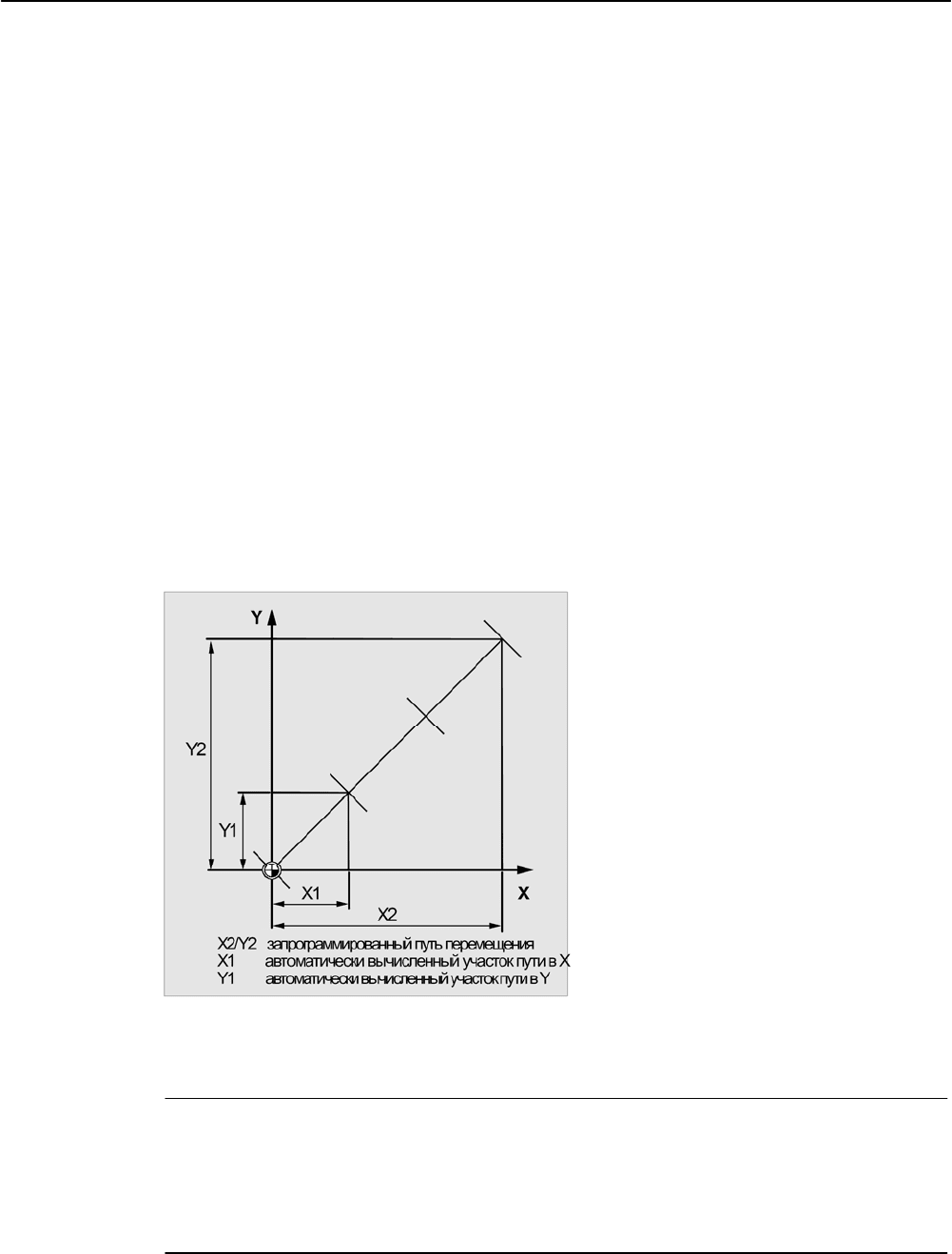
Число участков пути SPN
С помощью SPN определяется число участков пути, которые должны быть
созданы из всего пути. Длина участков пути вычисляется автоматически. Так как
SPN действует покадрово, то сначала необходимо активировать штамповку или
вырубку с PON или SON.
SPP
и SPN
в одном кадре
Если в одном кадре программируется как длина участков пути (SPP), так и число
участков пути (SPN), то для этого кадра действует SPN, для всех последующих SPP.
Если SPP уже была активирована до SPN, то она снова становится активной после
кадра SPN.
<
<
<
;
;
;
;
<
3URJUDPPLHUWH
9HUIDKUVWUHFNH
;
$XWRPDWLVFK
HUUHFKQHWH
7HLOVWUHFNH
LQ
;
<
$XWRPDWLVFK
HUUHFKQHWH
7HLOVWUHFNH
LQ
<
Указание
Поскольку штамповка/вырубка принципиально имеется в СЧПУ, то программирование
автоматического разделения пути с помощью SPN или SPP может быть активизировано
независимо от этой технологии.
Расширенное программирование
Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
12-9
Не для продажи
со станком