Velten K. Mathematical Modeling and Simulation: Introduction for Scientists and Engineers
Подождите немного. Документ загружается.


4.2 The Heat Equation 235
Fourier’s law can also be written as
q =−K ·∇T (4.6)
In these equations, q is the heat flow rate (W m
−2
). In a situation where you do
not have temperature gradients in the y and z directions (such as Problem 1 in
Section 4.1.3), Fourier’s law attains the one-dimensional form
q
x
=−K ·
dT
dx
(4.7)
So, you see that Fourier’s law expresses a very simple proportionality: the heat
flow in the positive x direction is negatively proportional to the temperature
gradient. This means that a temperature which is going down in the positive x
direction (corresponding to a negative value of dT/dx) generates a heat flow in
the positive x direction. This expresses our everyday experience that heat flows are
always directed from higher to lower temperatures (e.g. from your hot coffee cup
toward its surroundings).
4.2.2
Conservation of Energy
Let us now try to understand the heat equation. Remember that in the ODE models
discussed in Chapter 3, the left-hand sides of the ODEs usually expressed rates
of changes of the state variables, which were then expressed in the right-hand
sides of the equations. Take the body temperature model as an example: as
was explained in Section 3.4.1, Equation 3.28 is in an immediate and obvious
correspondence with a statement describing the temperature adaption such as the
sensor temperature changes proportionally to the difference between body temperature and
actual sensor temperature. Regarding PDEs, the correspondence with the process
under consideration is usually not so obvious. If you are concerned with PDEs
for some time, you will of course learn to ‘‘read’’ and understand PDEs and
their correspondence with the processes under consideration to some extent,
but understanding a PDE still needs one or two thoughts more as compared to
ODEs. Equation 4.1, for example, involves a combination of first- and second-order
derivatives with respect to different variables which expresses more than just a rate
of change of a quantity as was the case with ODEs. The problem is that PDEs
simultaneously express rates of changes of several quantities.
Fourier’s law provides us with a good starting point for the derivation of Equation
4.1. It is in fact one of the two main ingredients in the heat equation. What could
the other essential ingredient possibly be? From the ODE point of view, we could
say that Fourier’s law expresses the consequences of rates of changes of the
temperature with respect to the spatial variables x, y,andz. So, it seems obvious
that we have to look for equations expressing the rate of change of temperature
with respect to the remaining variable, which is time t.Suchanequationcanbe
derived from the conservation of energy principle [145].
236 4 Mechanistic Models II: PDEs
01x
x + Δx
x
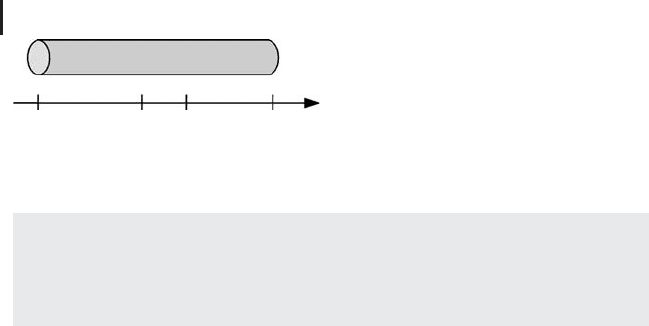
Fig. 4.2 Interval [x, x + x] corresponding to a small part of a one-dimensional body.
Note 4.2.1 (Deriving PDEs using conservation principles) Many of the impor-
tant PDEs of mathematical physics can be derived from conservation principles
such as conservation of energy, conservation of mass,orconservation of momentum
(see the examples in Section 4.10).
The most intuitive and least technical way to apply energy conservation is the
consideration of a small interval [x, x + x] corresponding to a small part of a
one-dimensional body (Figure 4.2).
Remember from your physics courses that the energy conservation principle
states that energy cannot be created or destroyed, which means that the total
amount of energy in any closed system remains constant. Applied to [x, x + x]
(you should always think of the part of the physical body corresponding to
[x, x + x] when we write down this interval in the following) this means that
any change in the energy content of [x, x + x] must equal the amount of heat
that flows into [x, x + x] through its ends at x and x + x. Note that there can
be no flow in the y and z directions since we assume a one-dimensional body
here. For example, imagine the outer surface of the cylinder in Figure 4.2 to be
perfectly insulated against heat flow (see Section 4.3.3 for more on dimensionality
considerations). The heat balance of [x, x + x] can be written as
⎧
⎪
⎨
⎪
⎩
Rate of change
of energy content
in [x, x + x]
⎫
⎪
⎬
⎪
⎭
=
Netheatinflow
through x and x + x
(4.8)
4.2.3
Heat Equation = Fourier’s Law + Energy Conservation
Basically, the heat equation can now be derived by putting together the results of the
last two sections. To this end, consider some small time interval [t, t + t]. Within
this time interval, the temperature at x will change from T(x, t)toT(x, t + t). This
corresponds to a change in the energy content of [x, x + x]thatwearegoingto
estimate now. First of all, note that for sufficiently small x,wehave
T(
˜
x, t) ≈ T(x, t) ∀
˜
x ∈ [x, x + x] (4.9)

4.2 The Heat Equation 237
and
T(
˜
x , t + t) ≈ T(x, t + t) ∀
˜
x ∈ [x, x + x] (4.10)
The last two equations say that we may take T(x, t)toT(x, t + t) as the ‘‘rep-
resentative temperatures’’ in [x, x + x]attimest and t + t, respectively. This
means that we are now approximately in the following situation: we have a physical
body corresponding to [x, x + x], which changes its temperature from T(x, t)to
T(x, t + t). Using the above explanation of C and denoting the mass of [x, x + x]
with m,we,thus,have
⎧
⎪
⎨
⎪
⎩
Rate of change
of energy content
in [x, x + x]
⎫
⎪
⎬
⎪
⎭
= C · m · (T(x, t + t) −T(x, t)) (4.11)
Denoting the cross-sectional area of the body in Figure 4.2 with A,wehave
m = Axρ, which turns Equation (4.11) into
⎧
⎪
⎨
⎪
⎩
Rate of change
of energy content
in [x, x + x]
⎫
⎪
⎬
⎪
⎭
= C · Axρ · (T(x, t + t) − T(x, t)) (4.12)
This gives us the left-hand side of Equation 4.8. The right-hand side of this
equation can be expressed as
Netheatinflow
through x and x + x
= At(q
x
(x) − q
x
(x + x)) (4.13)
using the heat flow rate q
x
introduced above. Note that the multiplication with At
is necessary in the last formula since q
x
expresses heat flow per units of time and
surface area: its unit is (W m
−2
) = (J s
−1
m
−2
). Note also that the signs used in the
difference q
x
(x) − q
x
(x + x) are chosen such that we get the net heat inflow as
required. Using Equations 4.8, 4.12, and 4.13, we obtain the following:
T(x, t + t) − T(x, t)
t
=
1
Cρ
q
x
(x) − q
x
(x + x)
x
(4.14)
Using Fourier’s law, Equation 4.7 gives
T(x, t + t) − T(x, t)
t
=
K
Cρ
∂T(x + x, t, t)
∂x
−
∂T(x, t)
∂x
x
(4.15)
From this, the heat equation (4.1) is obtained by taking the limit for t → 0and
x → 0.
238 4 Mechanistic Models II: PDEs
4.2.4
Heat Equation in Multidimensions
The above derivation of the heat equation can be easily generalized to multidimen-
sions by expressing energy conservation in volumes such as [x, x + x] × [y, y +
y]. Another option is to use an integral formulation of energy conservation over
generally shaped volumes, which leads to the heat equation by an application of
standard integral theorems [101]. In any case, the ‘‘small volumes’’ that are used to
consider balances of conserved quantities such as energy, mass, momentum, and
so on, similar to above are usually called control volumes. Beyond this, you should
note that the parameters C , ρ,andK may depend on the space variables. Just
check that the above derivation works without problems in the case where C and ρ
depend on x.IfK depends on x, the above derivation gives
∂T(x, t)
∂t
=
1
Cρ
∂
∂x
K(x) ·
∂T(x, t)
∂x
(4.16)
instead of Equation 4.1 and
∂T(x, t)
∂t
=
1
Cρ
∂
∂x
1
K(x) ·
∂T(x, t)
∂x
1
+
∂
∂x
2
K(x) ·
∂T(x, t)
∂x
2
+
∂
∂x
3
K(x) ·
∂T(x, t)
∂x
3
(4.17)
inthecasewhereK depends on the space coordinates x = (x
1
, x
2
, x
3
)
t
.Usingthe
nabla operator ∇ (Equation 4.5), the last equation can be written more compactly as
∂T(x, t)
∂t
=
1
Cρ
∇
K(x) ·∇T(x, t)
(4.18)
4.2.5
Anisotropic Case
Until now, the thermal conductivity was assumed to be independent of the direction
of measurement. Consider a situation with identical temperature gradients in the
three main space directions, that is,
∂T
x
1
=
∂T
x
2
=
∂T
x
3
(4.19)
Then, Fourier’s law (Equation 4.6) says that
q
1
= K ·
∂T
x
1
= q
2
= K ·
∂T
x
2
= q
3
= K ·
∂T
x
3
(4.20)
that is, the heat flux generated by the above temperature gradients is independent
of the direction in space (note that this argument can be generalized to arbitrary

4.2 The Heat Equation 239
directions). A material with a thermal conductivity that is direction independent
in this sense is called isotropic. The term ‘‘isotropy’’ is used for other material
properties such as fluid flow permeability or electrical conductivity in a similar way.
Materials that do not satisfy the isotropy condition of directional independence are
called anisotropic. For example, an anisotropic material may have a high thermal
conductivity in the x
1
direction and smaller conductivities in the other space
directions. A single number K obviously does not suffice to describe the thermal
conductivity in such a situation, which means you need a multi- or matrix-valued
thermal conductivity K such as
K =
⎛
⎜
⎝
K
11
K
12
K
13
K
21
K
22
K
23
K
31
K
32
K
33
⎞
⎟
⎠
(4.21)
Many other anisotropic material properties are described using matrices or
tensors in a similar way, while isotropic material properties are described using
a single scalar quantity such as the scalar thermal conductivity in Fourier’s law
(Equation 4.6) above. Thanks to matrix algebra, Equation 4.6 and the heat equation
(4.18) remain almost unchanged when we use K from Equation 4.21:
q(x, t) =−K ·∇T(x, t) (4.22)
∂T(x, t)
∂t
=
1
Cρ
∇
K(x) ·∇T(x, t)
(4.23)
The diagonal entries of K describe the thermal conductivities in the main space
directions, that is, K
11
is the thermal conductivity in x
1
direction, K
22
in x
2
direction,
and so on.
4.2.6
Understanding Off-diagonal Conductivities
To understand the off-diagonal entries, consider the following special case:
K =
⎛
⎜
⎝
K
11
K
12
0
0 K
22
0
00K
33
⎞
⎟
⎠
(4.24)
Applying this in Equation 4.22, the heat flow in the x
1
direction is obtained as
follows:
q
1
(x, t) = K
11
·
∂T(x, t)
∂x
1
+ K
12
·
∂T(x, t)
∂x
2
(4.25)
So, you see that K
12
= 0 means that the heat flow in the x
1
direction depends
not only on the temperature gradient in that direction, ∂T/∂x
1
,butalsoonthe
temperature gradient in the x
2
direction, ∂T/∂x
2
. You may wonder how this is
240 4 Mechanistic Models II: PDEs
x
2
x
1
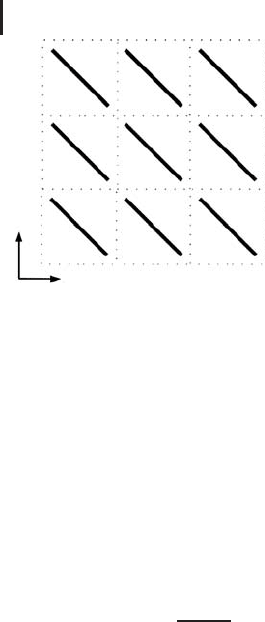
Fig. 4.3 Periodicity cells of a medium with an anisotropic effective thermal conductivity.
possible, so let us consider an example. Figure 4.3 shows a ‘‘microscopic picture’’
of a periodic medium in the x
1
/x
2
plane. Here, ‘‘periodic medium’’ means that the
medium is assumed to consist of a great number of periodicity cells such as those
shown in the figure. ‘‘Microscopic picture’’ is to say that the figure just shows a
few of the periodicity cells, which we assume to be very small parts of the overall
geometry of the medium in the x
1
/x
2
plane (we do not need the overall geometry
for our argument). Now assume that the black bars in the medium consist of
a material having zero thermal conductivity, while the matrix surrounding the
bars has some finite (scalar) thermal conductivity. If we now apply a temperature
gradient in the x
2
direction, this will initiate a heat flow in the same direction:
q
2
(x, t) = K
M
·
∂T(x, t)
∂x
2
(4.26)
Here, K
M
denotes the (isotropic) thermal conductivity of the matrix surrounding
the black bars in Figure 4.3. But due to the heat-impermeable bars in the medium,
this heat flow cannot go straight through the medium in the x
2
direction. Rather,
it will be partially deflected into the x
1
direction by the action of the bars. In this
way, a temperature gradient in the x
2
direction can indeed initiate a heat flow in
the x
1
direction. If one then assumes the periodicity cells in Figure 4.3 to be very
small in relation to the overall size of the medium and derives ‘‘effective’’, averaged
thermal conductivities for the medium, one arrives at thermal conductivity matrices
with off-diagonal entries similar to Equation 4.24. Such effective (‘‘homogenized’’)
thermal conductivities of periodic media can be derived, for example, using
the methods of homogenization theory [146,147]. Note that the effective thermal
conductivity matrix of a medium such as the one shown in Figure 4.3 will be
symmetric. Denoting this matrix as
˜
K =
˜
K
11
˜
K
12
˜
K
21
˜
K
22
(4.27)
means that we would have
˜
K
12
=
˜
K
21
for the medium in Figure 4.3.
4.3 Some Theory You Should Know 241
Note that the heat equation can be further generalized beyond Equation 4.23 to
include effects of heat sources, convective heat transfer, and so on, [97, 101].
4.3
Some Theory You Should Know
This section explains some theoretical background of PDEs. You can skip this in a
first reading if you just want to gain a quick understanding of how the problems
posed in Section 4.1.3 can be solved. In that case, go on with Section 4.4.
4.3.1
Partial Differential Equations
The last section showed that the problems posed in Section 4.1.3 lead us to the heat
equation (4.23). In this equation, the temperature T(x, t)(orT(x, y, t), or T(x, t),
depending on the dimensionality of the problem) serves as the unknown, and the
equation involves partial derivatives with respect to at least two variables. Hence,
the heat equation is a PDE, which can be generally defined as follows
Definition 4.3.1 (Partial differential equation) A PDE is an equation that
satisfies the following conditions:
•
A function u : R
n
⊃ → R serves as the unknown of the
equation.
•
The equation involves partial derivatives of u with respect to at
leasttwoindependentvariables.
This definition can be generalized to several unknowns, vector-valued unknowns,
and systems of PDEs, [101,142]. The fundamental importance of PDEs, which can
hardly be overestimated, arises from the fact that there is an abundant number
of problems in science and engineering which lead to PDEs, just as Problem 1
and Problem 2 led us to the heat equation in Section 4.2. One may find this
surprising, but remember the qualitative argument for the distinguished role of
differential equations (ODEs or PDEs) that has been given in Section 3.1 (Note
3.1.1): scientists or engineers usually are interested in rates of changes of their
quantities of interest, and since rates of changes are derivatives in mathematical
terms, writing down equations involving rates of changes thus means writing down
differential equations in many cases. The order of a PDE is the degree of the highest
derivative appearing in the PDE, which means that the heat equation discussed in
Section 4.2 is a second-order PDE.
Note 4.3.1 (Distinguished role of up to second-order PDEs) Most PDEs used
in science and engineering applications are first- or second-order equations.

242 4 Mechanistic Models II: PDEs
The derivation of the heat equation in Section 4.2 gives us an idea why this is
so. We have seen there that the heat equation arises from a combined application
of Fourier’s law and the energy conservation principle. Analyzing the formulas in
Section 4.2, you will see that the application of the conservation principle basically
amounted to balancing the conserved quantity (energy in this case) over some ‘‘test
volume’’, which was [x, x + x ] in Section 4.2. This balance resulted in one of the
two orders of the derivatives in the PDE, the other order was a result of Fourier’s
law, a simple empirical rate of change law similar to the ‘‘rate of change-based’’
ODEs considered in Section 3. Roughly speaking, one can, thus, say that you can
expect conservation arguments to imply one order of your derivatives, and ‘‘rate of
change arguments’’ to imply another derivative order. A great number of the PDEs
used in the applications is based on similar arguments. This is also reflected in the
PDE literature, which has its main focus on first- and second-order equations. It is,
therefore, not a big restriction if we confine ourselves to up to second-order PDEs
in the following. Note also that many of the formulas below will refer to the 2D
case (two independent variables x and y) just to keep the notation simple, although
everything can be generalized to multidimensions (unless otherwise stated).
4.3.1.1 First-order PDEs
The general form of a first-order PDE in two dimensions is [142]
F(x, y, u, u
x
, u
y
) = 0 (4.28)
Here, u = u(x, y) is the unknown function, x and y are the independent variables,
u
x
= u
x
(x, y)andu
y
= u
y
(x, y) are the partial derivatives of u with respect to x,and
y, respectively, and F is some real function. Since we are not going to develop
any kind of PDE theory here, there is no need to go into a potentially confusing
discussion of domains of definitions, differentiability properties, and so on, of
the various functions involved in this and the following equations. The reader
should note that our discussion of equations such as Equation 4.28 in this section
is purely formal, the aim just being a little sightseeing tour through the ‘‘zoo
of PDEs’’, showing the reader some of its strange animals and giving an idea
about their classification. Readers with a more theoretical interest in PDEs are
referred to specialized literature such as [101, 142]. Note that Equation 4.28 can
also beinterpreted as a vector-valued equation, that is, as a compact vector notation
of a first-order PDE system such as
F
1
(x, y, u, u
x
, u
y
) = 0
F
2
(x, y, u, u
x
, u
y
) = 0
.
.
.
F
n
(x, y, u, u
x
, u
y
) = 0
(4.29)
In a PDE system like this, u will also typically be a vector-valued function such as
u = (u
1
, ..., u
n
). The shock wave equation
u
x
+ u · u
y
= 0 (4.30)
4.3 Some Theory You Should Know 243
is an example of a PDE having the form of Equation 4.28. Comparing Equations
4.28 and 4.30, you see that the particular form of F in this example is
F(x, y, u, u
x
, u
y
) = u
x
+ u · u
y
(4.31)
Equations like 4.30 are used to describe abrupt, nearly discontinuous changes
of quantities such as the pressure or density of air, which appear, for example, in
supersonic flows.
4.3.1.2 Second-order PDEs
Writing down the general form of a second-order PDE just amounts to adding
second-order derivatives to the expression in Equation 4.28:
F(x, y, u, u
x
, u
y
, u
xx
, u
xy
, u
yy
) = 0 (4.32)
An example is the one-dimensional heat equation, that is, the heat equation in
asituationwhereT depends only on x and t . Then, the partial derivatives with
respect to y and z in Equation 4.1 vanish, which leads to
∂T
∂t
=
K
Cρ
∂
2
T
∂x
2
(4.33)
Using the index notation for partial derivatives similar to Equation 4.32, this
gives
F(t, x, T, T
t
, T
x
, T
tt
, T
tx
, T
xx
) = T
t
−
K
Cρ
T
xx
= 0 (4.34)
Note that this is exactly analogous to Equation 4.32, except for the fact that
different names are used for the independent variables and for the unknown
function.
4.3.1.3 Linear versus Nonlinear
As it holds true for other types of mathematical equations, linearity is a property of
PDEs which is of particular importance for an appropriate choice of the solution
method. As usual, it is easier to solve linear PDE’s. Nonlinear PDEs, on the other
hand, are harder to solve, but they are also often more interesting in the sense
that they express a richer and more multifaceted dynamical behavior of their state
variables. Equation 4.34 is a linear PDE since it involves a sum of the unknown
function and its derivatives where the unknown function and its derivatives are
multiplied by coefficients independent of the unknown function or its derivatives.
Equation 4.30, on the other hand, is an example of a nonlinear PDE, since this
equation involves a product of the unknown function u with its derivative u
y
.
The general strategy to solve nonlinear equations in all fields of mathematics is
linearization, that is, the consideration of linear equations that approximate a given
nonlinear equation. The Newton method for the solution of nonlinear equations

244 4 Mechanistic Models II: PDEs
f (x) = 0 is an example, which is based on the local approximation of the function
f (x) by linear equations ax + b describing tangents of f (x) [148]. Linearization
methods such as the Newton method usually imply the use of iteration procedures,
which means that a sequence of linearized solutions x
1
, x
2
, ...is generated, which
converges to the solution of the nonlinear equation. Such iteration procedures
(frequently based on appropriate generalizations of the Newton method) are also
used to solve nonlinear PDEs [141]. Of course, the theoretical understanding of
linear PDEs is of great importance as a basis of such methods, and there is in fact
a well-developed theory of linear PDEs, which is described in detail in specialized
literature such as [101, 142]. We will now just sketch some of the main ideas of the
linear theory that are relevant within the scope of this book.
4.3.1.4 Elliptic, Parabolic, and Hyperbolic Equations
The general form of a linear second-order PDE in two dimensions is
Au
xx
+ Bu
xy
+ Cu
yy
+ Du
x
+ Eu
y
+ F = 0 (4.35)
Here, the coefficients A, ..., F are real numbers, which may depend on the
independent variables x and y. Depending on the sign of the discriminant
d = AC − B
2
, linear second-order PDEs are called
•
elliptic if d > 0,
•
parabolic if d = 0, and
•
hyperbolic if d < 0
SincewehaveallowedthecoefficientsofEquation4.35tobex and y dependent,
thetypeofanequationinthesenseofthisclassificationmayalsodependonx and
y. AnexampleistheEuler–Tricomi equation:
u
xx
− x · u
yy
= 0 (4.36)
This equation is used in models of transonic flow, that is, in models referring to ve-
locities close to the speed of sound [149]. The change of type in this equation occurs
due to the nonconstant coefficient of u
yy
. The discriminant of Equation 4.36 is
d = AC − B
2
= x
>0ifx > 0
< 0ifx < 0
(4.37)
which means that the Euler–Tricomi equation is an elliptic equation in the positive
half plane x > 0 and a hyperbolic equation in the negative half plane x < 0.
The above classification is justified by the fact that Equation 4.35 can be brought
into one of three standard forms by a linear transformation of the independent
variables, where the standard form corresponding to any particular equation
depends on the discriminant d [142]. Using ‘‘···’’ to denote terms that do not
involve second-order derivatives, the standard forms of elliptic, parabolic, and