Zhang K., Li D. Electromagnetic Theory for Microwaves and Optoelectronics
Подождите немного. Документ загружается.

9.5 Higher-Order Modes of Gaussian Beams 601
Substituting (9.122) into (9.121), we obtain
ζ
∂
2
G
∂ζ
2
+ (l + 1 − ζ)
∂G
∂ζ
−
l
2
G −
jkw
2
4
∂G
∂z
0
= 0. (9.123)
In (9.123), the coefficients of ∂
2
G/∂ζ
2
and ∂G/∂ζ are the corresponding
coefficients of the Laguerre equation, and it can be solved by separation of
variables. Supposing
G = M (ζ)Z(z
0
), (9.124)
and substituting it into (9.123), we derive
ζ
d
2
M
dζ
2
+ (l + 1 − ζ)
dM
dζ
+ pM = 0, (9.125)
dZ
dz
0
−
2j(2p + l)
kw
2
Z = 0. (9.126)
In the above equations, p is an integer. The solutions of them are
M(ζ) = L
l
p
(ζ), (9.127)
Z(z
0
) = exp
·
j(2p + l) arctan
µ
z
0
− z
0
s
¶¸
, (9.128)
where L
l
p
is called as the Laguerre polynomial of order p expressed as
L
l
p
=
p
X
k=0
(p + l)!(−ζ)
k
(l + k)!k!(p − k)!
. (9.129)
The amplitude distribution of a Laguerre-Gaussian beam is
ψ(r, θ, z) = c
pl
1
w(z)
"
√
2ρ
w(z)
#
l
L
l
p
·
2ρ
2
w
2
(z)
¸½
cos lθ
sin lθ
¾
exp
·
−
ρ
2
w
2
(z)
¸
×exp
½
−j
·
kz +
k
2R(z)
ρ
2
− (2p + l + 1) arctan
µ
z − z
0
s
¶¸¾
. (9.130)
If l = 0, the distribution is axially symmetric. If l = p = 0, the distribution
is the fundamental mode.
The transverse distribution of the Laguerre-Gaussian beam is determined
by p and l, and the transverse modes are represented by TEM
lp
. The distri-
bution along θ is determined by l, and that along ρ is determined by both p
and l. In the radical direction, the positions of null amplitude are determined
by
ρ
l
L
l
p
µ
2ρ
2
w
2
¶
= 0. (9.131)
602 9. Gaussian Beams
0.0 .5 1.0 1.5 2.0 2.5 3.0 3.5 4.0
-.6
-.4
-.2
0.0
.2
.4
.6
.8
1.0
A
02
A
01
A
00
0.0 .5 1.0 1.5 2.0 2.5 3.0 3.5 4.0
-.8
-.6
-.4
-.2
0.0
.2
.4
.6
.8
1.0
1.2
w
U
A
00
A
01
A
02
A
10
A
11
A
12
A
10
A
11
A
12
w
U
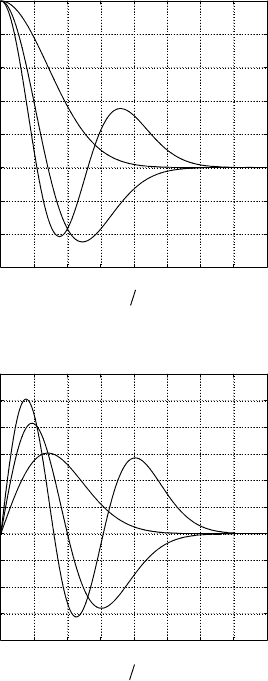
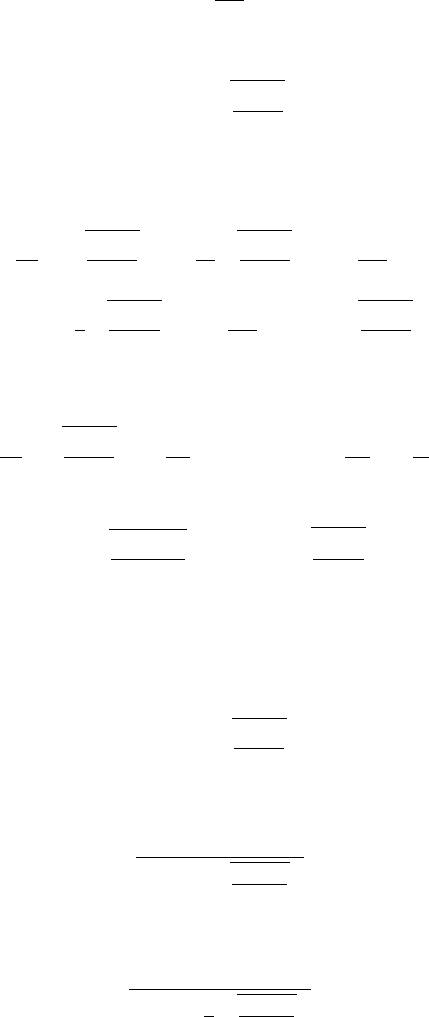
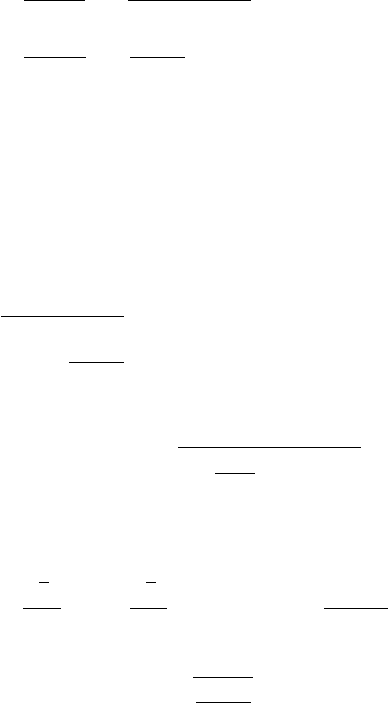
Figure 9.12: The radial amplitude distributions of several lowest-order
Laguerre-Gaussian beams.
9.6 Gaussian Beams in Quadratic Index Media 603
As p = 0, there is only one null (l 6= 0), or there is no null (l = 0). The
positions of the extrema are determined by
∂
∂ρ
·
ρ
l
L
l
p
µ
2ρ
2
w
2
¶
exp
µ
−
ρ
2
w
2
¶¸
= 0. (9.132)
As p = 0, there is only one maximum value, and its position is
ρ =
r
l
2
w(z). (9.133)
In Fig. 9.12, the radial amplitude distributions of several lowest-order
Laguerre-Gaussian beams are given. Unlike in Hermite-Gaussian beams, in
Laguerre-Gaussian beams the maximum of the amplitude is close to the axis.
The phase velocity on the beam axis is
v
p
=
ω
k − (2p + l + 1)
s
(z − z
0
)
2
+ s
2
. (9.134)
The curvature radius of the phase front is nearly independent of the order,
and it is approximately R(z). The beam half-width may be defined similarly
as in Hermite-Gaussian. Later on, without special indication, w and w
0
are
still called the radii of the beam and the beam waist, respectively, for any
order modes of Gaussian beams.
9.6 Gaussian Beams in Quadratic Index
Media
The quadratic index profile stands for the axially symmetric distribution of
the complex refractive index, which is expressed as
˙n = n
0
− jn
00
, (9.135)
where n
0
and n
00
are the real part and the imaginary part expressed as
n
0
= n
0
0
¡
1 − gρ
2
¢
and n
00
= n
00
0
¡
1 − hρ
2
¢
. (9.136)
In the above formulas, hρ
2
¿ 1, gρ
2
¿ 1, and n
00
0
¿ n
0
0
. The complex index
denotes that there exists gain or loss in the media. The complex index profile
exists in many lasers, self-focus lenses and graded-index optical fibers, etc.
It is due to the variation of gain saturation or pumping intensity along the
radial direction in solid lasers, the radial distribution of energetic electrons
in gas lasers and the radial variation of doping density in graded-index fibers
and self-focus lenses [4, 116].
604 9. Gaussian Beams
9.6.1 The General Solution
As the spatial variation of the index is small and smooth, the scalar Helmholtz
equation (9.1) is still valid, but k needs to be expressed as a function of the
spatial coordinates
k
2
= ω
2
²
0
µ
0
˙n
2
= k
2
0
˙n
2
= k
2
0
˙n
2
0
¡
1 − Γ
2
ρ
2
¢
, (9.137)
where
˙n
0
= n
0
0
− jn
00
0
, n
00
0
¿ n
0
0
, (9.138)
Γ
2
= 2g − j
2n
00
0
n
0
0
(h − g). (9.139)
Substitution of (9.137) into (9.1) yields
∇
2
ψ + k
2
0
˙n
2
0
¡
1 − Γ
2
ρ
2
¢
ψ = 0, (9.140)
where
ψ = A
0
u(ρ, z)e
−jk
0
˙n
0
z
. (9.141)
Substituting (9.141) into (9.140), within the paraxial condition, we obtain
∂
2
u
∂ρ
2
+
1
ρ
∂u
∂ρ
− 2jk
0
˙n
0
∂u
∂z
− k
2
0
˙n
2
0
Γ
2
ρ
2
u = 0. (9.142)
Supposing the solution of (9.142) to be
u = exp
·
−jp(z) −
jk
0
˙n
0
2q(z)
ρ
2
¸
, (9.143)
and substituting it into (9.142), we obtain
d
dz
µ
1
q
¶
+
µ
1
q
¶
2
+ Γ
2
= 0, (9.144)
d
dz
p +
j
q
= 0. (9.145)
The solution of (9.144) is
Γ q = tan[Γ (z − b)], (9.146)
where b is a constant. At z = 0, q = q
0
, then
−Γ q
0
= tan Γ b. (9.147)
Substitution (9.147) into (9.146) yields
q =
q
0
cos Γ z +
1
Γ
sin Γ z
−q
0
Γ sin Γ z + cos Γ z
. (9.148)
9.6 Gaussian Beams in Quadratic Index Media 605
From (9.145) and (9.148) we derive
p = −j ln
µ
q
0
cos Γ z +
1
Γ
sin Γ z
¶
. (9.149)
Substituting (9.148) and (9.149) into (9.143), then substituting the obtained
u into (9.141), we obtain the final result:
ψ =
−jA
0
|q
0
cos Γ z + sin Γ z/Γ |
exp
µ
−k
0
n
00
0
z −
ρ
2
w
2
¶
exp
·
−jk
0
n
0
0
µ
z+
ρ
2
2R
¶
+ jφ
¸
,
(9.150)
where
1
w
2
= −
π
λ
=
µ
˙n
0
q
¶
, (9.151)
1
R
=
1
n
0
0
<
µ
˙n
0
q
¶
, (9.152)
tan φ =
<
³
q
0
cos Γ z +
1
Γ
sin Γ z
´
=
³
q
0
cos Γ z +
1
Γ
sin Γ z
´
. (9.153)
The equation of the phase front is then
k
0
n
0
0
z + k
0
<
µ
˙n
0
2q
¶
ρ
2
− arctan
<
³
q
0
cos Γ z +
1
Γ
sin Γ z
´
=
³
q
0
cos Γ z +
1
Γ
sin Γ z
´
= C, (9.154)
where C is a constant.
From (9.148) the transformation formula of the q parameter can be de-
rived. The ABCD matrix is
·
A B
C D
¸
=
"
cos Γ z
1
Γ
sin Γ z
−Γ sin Γ z cos Γ z
#
(9.155)
If the beam distribution does not vary with the propagating distance, this
distribution is called the steady-state solution. In homogeneous media there
is no steady-state solution, but in the media with a quadratic index profile
it may exist. As q does not vary with z, that is dq/dz = 0, the steady-state
solution can be obtained. From (9.144) and (9.145) we have
q =
j
Γ
and p = −Γ z. (9.156)
Substitution (9.156) into (9.143) and (9.141) yields the steady-state distribu-
tion
ψ = A
0
e
−jk
0
˙n
0
z
exp
µ
jΓ z −
k
0
˙n
0
Γ
2
ρ
2
¶
606 9. Gaussian Beams
= A
0
exp
·
−k
0
n
00
0
z − =(Γ )z −
1
2
k
0
<( ˙n
0
Γ )ρ
2
¸
×exp
½
−jk
0
·
n
0
0
z +
1
2
=( ˙n
0
Γ )ρ
2
¸
+ j<(Γ )z
¾
. (9.157)
9.6.2 Propagation in Medium with a Real Quadratic
Index Profile
As n
00
0
= 0, the index distribution is a real quadratic profile. Graded-index
optical fibers and self-focus lenses usually have this kind of index distribution.
From (9.148), it is known that q is a periodic function of z. We take q
0
as an
imaginary number:
q
0
= js. (9.158)
From (9.148) we obtain
q =
js cos Γ z +
1
Γ
sin Γ z
−jsΓ sin Γ z + cos Γ z
. (9.159)
Substitution (9.159) into (9.151) yields the beam radius
w
2
=
λ
¡
sin
2
Γ z + Γ
2
s
2
cos
2
Γ z
¢
πn
0
0
sΓ
2
. (9.160)
The beam radius is a periodic function of z. The condition for w to have
extrema is
Γ z =
Nπ
2
(N = 0, 1, 2, ···) (9.161)
Under the condition that Γ
2
s
2
¿ 1, we derive the maximum value and the
minimum value of the beam radius
w
2
max
=
λ
πn
0
0
sΓ
2
, and w
2
min
=
λs
πn
0
0
. (9.162)
The ratio between them is
w
min
w
max
= sΓ. (9.163)
If the minimum radius is w
0
, from (9.162) we obtain
s =
n
0
0
πw
2
0
λ
. (9.164)
From (9.163) the steady condition that the b eam radius is invariable is
sΓ = 1. (9.165)
9.6 Gaussian Beams in Quadratic Index Media 607
Equation (9.165) is consistent with (9.156). Substitution of (9.164) and
(9.139) into (9.165) yields the condition for a steady-state solution:
πn
0
0
w
2
0
√
2g
λ
= 1. (9.166)
If a Gaussian beam with its waist radius determined by (9.166) is normally
incident on a medium with a quadratic index profile, and the beam waist is
located at the surface, the transmitted beam will propagate steadily.
From (9.157) the amplitude distribution for the steady-state solution is
ψ = A
0
exp
µ
−
1
2
k
0
n
0
0
p
2gρ
2
¶
exp
h
−j
³
k
0
n
0
0
−
p
2g
´
z
i
. (9.167)
The propagation constant is
β = k
0
n
0
0
−
p
2g = k
0
n
0
0
−
1
s
= k
0
n
0
0
−
2
k
0
n
0
0
w
2
0
. (9.168)
The phase velocity is
v
p
=
ω
β
=
ω
k
0
n
0
0
−
2
k
0
n
0
0
w
2
0
=
c
n
0
0
"
1 − 2
µ
1
k
0
n
0
0
w
0
¶
2
#
, (9.169)
where c is the light velocity in free space. If the material dispersion is ne-
glected, that is, n
0
0
is independent of the frequency, we derive the group
velocity
v
g
=
c
n
0
0
"
1 + 2
µ
1
k
0
n
0
0
w
0
¶
2
#
. (9.170)
Combining (9.169) and (9.170), we obtain
v
p
v
g
=
c
2
n
02
0
"
1 − 4
µ
1
k
0
n
0
0
w
0
¶
4
#
. (9.171)
9.6.3 Propagation in Medium with an Imaginary
Quadratic Index Profile
In some lasing media the real part of the refractive index is a constant, and the
imaginary part has a quadratic profile. The relation between the imaginary
part of the refractive index and the gain/attenuation coefficient is ±α,
α = −2k
0
n
00
= −2k
0
n
00
0
¡
1 − hρ
2
¢
= α
0
¡
1 − hρ
2
¢
, (9.172)
608 9. Gaussian Beams
where
n
00
0
= −
α
0
2k
0
. (9.173)
Substituting (9.173) and g = 0 into (9.139), we obtain
Γ = (1 + j)
s
α
0
h
2k
0
n
0
0
. (9.174)
Here we discuss only the steady-state solution. Substituting (9.174) into
(9.157), we obtain
ψ = A
0
exp
"Ã
α
0
2
−
s
α
0
h
2k
0
n
0
0
!
z −
k
0
2
s
α
0
h
2k
0
n
0
0
µ
n
0
0
−
α
0
2k
0
¶
ρ
2
#
×exp
(
−jk
0
"
n
0
0
z
+
1
2
s
α
0
h
2k
0
n
0
0
µ
n
0
0
+
α
0
2k
0
¶
ρ
2
#
+ j
s
α
0
h
2k
0
n
0
0
z
)
. (9.175)
Neglecting the high-order quantities, (9.175) is simplified to
ψ =A
0
exp
"Ã
α
0
2
−
s
α
0
h
2k
0
n
0
0
!
z −
ρ
2
w
2
#
exp
·
−jk
0
n
0
0
µ
z+
ρ
2
2R
¶
+ j
z
R
¸
, (9.176)
where
w
2
= 2
s
2
k
0
n
0
0
α
0
h
, R =
s
2k
0
n
0
0
α
0
h
, (9.177)
w is the beam radius. From (9.177) it is easy to prove that 1/R ¿ k
0
n
0
0
.
Because of this, from (9.176) we know that R is the curvature radius of the
phase front.
On the axis, the propagation constant is
β = k
0
n
0
0
−
s
α
0
h
2k
0
n
0
0
. (9.178)
The phase velocity is
v
p
=
c
n
0
0
µ
1 −
r
α
0
h
2k
3
0
n
03
0
¶
. (9.179)
The group velocity is
v
g
=
c
n
0
0
µ
1 +
1
2
r
α
0
h
2k
3
0
n
03
0
¶
. (9.180)
9.6 Gaussian Beams in Quadratic Index Media 609
In media with an imaginary quadratic index profile the Gaussian beam
can propagate steadily, and the amplitude is amplified. Because the energy
is confined in the region near the axis, we can call it a waveguide with gain.
From (9.177) we know that the larger the value of α
0
h, the smaller the beam
radius. The phase front is a spherical surface with a constant radius instead
of a plane, and this is an important difference between gain waveguides and
refractive-index waveguides. In the refractive-index waveguides the index is
higher near the axis, so the phase delay is greater, which counteracts the
phase advance near the beam axis in a Gaussian beam, and this results in
a plane phase front and a steady beam radius. In the gain waveguides, the
beam does not spread because of the higher gain near the axis, so the phase
front is a spherical surface. In practical applications pure gain waveguides do
not often exist, instead the gain and index waveguides exist simultaneously.
9.6.4 Steady-State Hermite-Gaussian Beams in
Medium with a Quadratic Index Profile
In homogeneous media, the Hermite-Gaussian beams are approximate solu-
tions of the Helmholtz equation within the paraxial condition, but for the
steady-state solutions in quadratic-index media the paraxial condition is un-
necessary. We can derive the exact solutions directly from the wave equation.
The solution is assumed to be
ψ = A
0
u(x, y)e
−jβz
, (9.181)
where A
0
is a constant and β is a complex propagation constant. Substituting
(9.181) into (9.140), we obtain
∂
2
u
∂x
2
+
∂
2
u
∂y
2
+ k
2
0
˙n
2
0
£
1 − Γ
2
¡
x
2
+ y
2
¢¤
u − β
2
u = 0. (9.182)
With the substitution that u = P (x)Q(y), (9.182) becomes
1
P (x)
d
2
P (x)
dx
2
+
1
Q(y)
d
2
Q(y)
dy
2
+ k
2
0
˙n
2
0
− k
2
0
˙n
2
0
Γ
2
¡
x
2
+ y
2
¢
− β
2
= 0. (9.183)
(9.183) is divided into two equations
1
P (x)
d
2
P (x)
dx
2
+ k
2
0
˙n
2
0
− β
2
− σ − k
2
0
˙n
2
0
Γ
2
x
2
= 0, (9.184)
1
Q(y)
d
2
Q(y)
dx
2
+ σ − k
2
0
˙n
2
0
Γ
2
y
2
= 0, (9.185)
where σ is a constant. Making the argument substitution that
ξ =
p
k
0
˙n
0
Γ x, η =
p
k
0
˙n
0
Γ y, (9.186)
610 9. Gaussian Beams
we obtain
d
2
P (ξ)
dξ
2
+
µ
k
2
0
˙n
2
0
− β
2
− σ
k
0
˙n
0
Γ
− ξ
2
¶
P (ξ) = 0, (9.187)
d
2
Q(η)
dη
2
+
µ
σ
k
0
˙n
0
Γ
− η
2
¶
Q(η) = 0. (9.188)
The solutions of the above equations are
P (ξ) = H
m
(ξ)e
−ξ
2
/2
, (9.189)
Q(η) = H
n
(η)e
−η
2
/2
, (9.190)
where H
m
and H
n
are Hermite polynomials with orders m and n, which
satisfy the following equations
k
2
0
˙n
2
0
− β
2
− σ
k
0
˙n
0
Γ
= 2m + 1, m = 0, 1, 2 ···, (9.191)
σ
k
0
˙n
0
Γ
= 2n + 1, n = 0, 1, 2 ···. (9.192)
Eliminating σ in the above equations, we obtain
β = β
mn
= k
0
˙n
0
r
1 −
2Γ
k
0
˙n
0
(m + n + 1). (9.193)
Substitution of (9.189), (9.190) and (9.193) into (9.181) yields the field
distribution
ψ = A
0
H
m
Ã
√
2x
w
0
!
H
n
Ã
√
2y
w
0
!
e
−jβ
mn
z
exp
µ
−
x
2
+ y
2
w
2
0
¶
, (9.194)
where
w
0
=
r
2
k
0
˙n
0
Γ
. (9.195)
If ˙n
0
is a real number, w
0
is the radius of the fundamental mode, and
β
mn
is a real propagation constant. The propagation constant is dependent
on the index distribution and the order number. The higher the order, the
smaller the propagation constant.
For the media with an elliptic quadratic index profile, the index is ex-
pressed as
˙n = n
0
− jn
00
= n
0
0
¡
1 − g
x
x
2
− g
y
y
2
¢
− jn
00
0
¡
1 − h
x
x
2
− h
y
y
2
¢
. (9.196)
From (9.196) we derive
˙n
2
= ˙n
2
0
¡
1 − Γ
2
x
x
2
− Γ
2
y
y
2
¢
, (9.197)