Поляк Б.Т., Щербаков П.С. Робастная устойчивость и управление
Подождите немного. Документ загружается.


4.2. Общий вид стабилизирующих регуляторов 111
где A(s), B(s) — полиномы; deg A = m ≤ deg B = n. Требуется описать все регуляторы
C(s) =
N(s)
D(s)
,
для которых замкнутая система рис. 4.1 устойчива, т.е. для которых характеристичекий
полином
P (s) = A(s)N(s) + B(s)D(s) (4.7)
является гурвицевым. Изменим несколько точку зрения: зафиксируем гурвицев поли-
ном P (s) и постараемся найти полиномы N(s), D(s), удовлетворяющие уравнению (4.7).
Можно ожидать, что эта задача разрешима, если степени полиномов N(s), D(s) доста-
точно велики — ведь (4.7) является линейным уравнением относительно коэффициентов
этих полиномов. Оказывается, что это действительно так для любых взаимно простых
(т.е. не имеющих общих корней) полиномов A(s), B(s) (можно показать, что взаимная
простота A(s) и B(s) эквивалентна управляемости системы, записанной в пространстве
состояний). Напомним сначала полезную Теорему П.4 (см. Приложение).
Теорема 26 Пусть полиномы A(s), B(s) взаимно просты. Тогда полиномиальное урав-
нение
AX + BY = 1 (4.8)
всегда имеет решение X
0
, Y
0
с deg X
0
≤ deg B − 1, deg Y
0
≤ deg A − 1, причем общее
решение имеет вид
X = X
0
+ BR, Y = Y
0
− AR,
где R = R(s) — произвольный полином.
Отсюда нетрудно получить общее решение уравнения (4.7):
N = P X
0
+ BR, D = P Y
0
− AR. (4.9)
Действительно, поскольку произведение полиномов коммутативно, то
AN + BD = AP X
0
+ ABR + BP Y
0
− BAR = P (AX
0
+ BY
0
) = P.
Казалось бы, мы получили общий способ построения стабилизирующих регуляторов:
находим частное решение
X
0
, Y
0
уравнения (4.8), выбираем любой устойчивый поли-
ном P и произвольный полином R и строим N, D по формулам (4.9). Тогда регулятор
C = N/D стабилизирует систему, а характеристический полином замкнутой системы
равен P, т.е. он устойчив. Однако такой вывод, будучи формально правильным, не
вполне корректен. Дело в том, что каждое из выражений AN и BD — полином более
высокой степени, чем P . Например, если A, B — полиномы степени n, а P — полином
степени p, то deg X
0
= deg Y
0
= n −1, и при любом R имеем deg N = deg D ≥ p + n −1,
deg AN = deg BD ≥ p + 2n − 1 > p для всех n ≥ 1. Поэтому при суммировании AN
и BD обязательно сокращение старших членов, однако оно небезобидно. Если реальный
объект G(s) немного отличается от номинального (или фактический регулятор C(s)
112 Глава 4. Стабилизация
несколько отличается от планируемого), то полного сокращения старших членов не
произойдет, и мы получим характеристический полином вида
P
ε
(s) = P (s) + εP
1
(s),
где P — устойчивый полином степени p, P
1
содержит члены степени выше p, а ε — малый
параметр. Но такой полином никогда не бывает устойчив при сколь угодно малых ε
любого знака (это не противоречит тому, что в Теореме 24 утверждается устойчивость
некоторых таких полиномов при положительных малых ε).
Таким образом, приведенный выше способ стабилизации нуждается в корректит-
ровке; ее нетрудно произвести. Запишем G(s) в эквивалентном виде
G(s)
.
=
U(s)
V (s)
, U(s) =
A(s)
F (s)
, V (s) =
B(s)
F (s)
, (4.10)
где F (s) — произвольный устойчивый полином степени n. Вместо (4.8) запишем теперь
уравнение
UX + V Y = 1, (4.11)
где U, V ∈ RH
∞
, а RH
∞
— пространство устойчивых реализуемых дробно-рациональ-
ных функций. Такое уравнение, подобно полиномиальному уравнению, имеет решение
X, Y ∈ R H
∞
(см. Лемму П.12), и с его помощью может быть описано все семейство
стабилизирующих регуляторов.
Теорема 27 Пусть полиномы A(s), B(s) взаимно просты. Тогда уравнение (4.11) име-
ет решение X, Y ∈ RH
∞
, и все стабилизирующие регуляторы имеют вид
C(s) =
X + V Q
Y − UQ
, (4.12)
где Q ∈ RH
∞
произвольно.
Доказательство. Прежде всего проверим, что регуляторы вида (4.12) действительно
являются стабилизирующими. Передаточная функция замкнутой системы равна
H =
GC
1 + GC
=
U(X + V Q)
U(X + V Q) + V (Y − UQ)
=
U(X + V Q)
UX + V Y
= U(X + V Q).
Поскольку U, X, V, Q — все функции из RH
∞
, то их суммы и произведения тоже при-
надлежат RH
∞
, т.е. H — реализуемая дробно-рациональная функция с устойчивым
знаменателем, что и означает устойчивость замкнутой системы.
Обратно, пусть C
.
= U
c
/V
c
— какой-то стабилизирующий регулятор, U
c
, V
c
∈ RH
∞
.
Тогда для передаточной функции замкнутой системы имеем
H =
GC
1 + GC
=
UU
c
UU
c
+ V V
c
.
= UU
c
W,
где обозначено W
.
= ( UU
c
+ V V
c
)
−1
. Поэтому, если H, U, U
c
∈ RH
∞
, то и W ∈ RH
∞
(в
противном случае было бы H /∈ RH
∞
). Возьмем теперь
Q
.
=
Y − V
c
W
U
.

4.2. Общий вид стабилизирующих регуляторов 113
Тогда
1 = W UU
c
+ W V V
c
= W UU
c
+ V (Y − UQ) = W UU
c
+ 1 − UX − V UQ,
откуда U
c
W = X + V Q. Поэтому
C =
U
c
V
c
=
U
c
W
V
c
W
=
X + V Q
Y − UQ
.
Остается показать, что Q ∈ RH
∞
. Действительно, V
c
W = Y − UQ, U
c
W = X + V Q;
поэтому, умножая первое уравнение на X, второе на Y и вычитая первое из второго,
получаем
V
c
W Y − U
c
W X = Y V Q + XUQ = Q.
Поскольку левая часть принадлежит R H
∞
, то и Q ∈ RH
∞
.
Заметим, что при таком подходе не происходит никаких неприятностей типа со-
кращения старших членов полиномов в полиномиальном подходе (формула (4.9) для
стабилизирующих регуляторов). Внимательный анализ приведенных выше выкладок
показывает, что здесь нет сокращения неустойчивых нулей и полюсов (об опасности
этого говорилось в разделе 3.4); дело в том, что мы всюду предполагали, что числите-
ли и знаменатели функций из RH
∞
взаимно просты.
В заключение — несколько слов о специфике дискретных систем. Как мы видели (см.
Теорему 25) добавление малых членов старшего порядка в полином P (z) не нарушает
его устойчивости. Именно, если
P (z) = a
0
+ a
1
z + . . . + a
n
z
n
имеет все корни вне единичного круга, то и полином
P (z) + ε
n+1
z
n+1
+ . . . + ε
m
z
m
устойчив при достаточно малых |ε
i
|, i = n + 1, . . . , m, и любых m > n. Поэтому сокра-
щение старших членов в таких полиномах не представляет опасности. Таким образом,
мы заключаем:
Теорема 28 Все стабилизирующие регуляторы для дискретного объекта
G(z) =
A(z)
B(z)
,
где A(z), B(z) — взаимно простые полиномы, даются формулой
C(z) =
P X
0
+ BR
P Y
0
− AR
,
где X
0
(z), Y
0
(z) — полиномы, являющиеся решением уравнения
AX + BY = 1, (4.13)
P = P (z) — дискретно-устойчивый полином, а R = R(z) — произвольный полином.

114 Глава 4. Стабилизация
В качестве X
0
, Y
0
можно выбрать решение уравнения (4.13) минимальной степени,
т.е.
deg X
0
≤ deg B − 1, deg Y
0
≤ deg A − 1.
Кроме того, разделив числитель и знаменатель в формуле для C(z) на P (z), получим
общий вид стабилизирующего регулятора в форме
C(z) =
X
0
+ BQ
Y
0
− AQ
, (4.14)
где Q(z) — произвольная устойчивая дробно-рациональная функция (т.е. не имеющая
полюсов в единичном круге).
Важно отметить, что приведенный выше способ описания стабилизирующих регу-
ляторов переносится почти полностью на случай многомерных систем. Небольшое раз-
личие заключается в том, что произведение матриц некоммутативно, поэтому небезраз-
лично, в каком порядке они записаны. Приведем окончательный результат без доказа-
тельства.
Назовем матричные передаточные функции U, V ∈ RH
∞
несократимыми слева,
если уравнение
UX + V Y = I
имеет решение X, Y ∈ RH
∞
. Аналогично, матричные передаточные функции
b
U,
b
V ∈
RH
∞
несократимы справа, если уравнение
c
X
b
U +
b
Y
b
V = I
имеет решение
c
X,
b
Y ∈ RH
∞
(см. раздел 8 Приложения). Пусть реализуемая передаточ-
ная функция G(s) объекта записана в виде несократимого левого или правого разло-
жения:
G(s) = U(s)V
−1
(s) =
b
V
−1
(s)
b
U(s), (4.15)
где U, V — несократимые слева, а
b
U,
b
V — несократимые справа матричные переда-
точные функции из RH
∞
. Мы рассматриваем конфигурацию рис. 3.7 (изменяя обо-
значение K(s) на привычное C(s)) и ищем общий вид стабилизирующих регуляторов
(обеспечивающих внутреннюю устойчивость системы, см. раздел 3.4), т.е. таких матриц
C(s), что четыре передаточные функции
(I −CG)
−1
, (I −CG)
−1
C, (I − GC)
−1
G, (I −GC)
−1
принадлежат RH
∞
(см. (3.23)).
Теорема 29 Все стабилизирующие регуляторы имеют вид
C = (X + V Q)(Y + UQ)
−1
= (
b
Y + Q
b
U)
−1
(
c
X + Q
b
V ), (4.16)
где Q ∈ RH
∞
.
4.3. Размещение полюсов 115
Ясно, что для одномерного случая U =
b
U, V =
b
V , X =
c
X, Y =
b
Y , и этот результат
совпадает с Теоремой 27.
Представление всех стабилизирующих регуляторов, даваемое Теоремой 29 называ-
ется параметризацией Юлы, а матрица Q — параметром Юлы. Основное преимуще-
ство, даваемое такой параметризацией, заключается в том, что передаточные функции
замкнутой системы, как показывают приводимые ниже формулы:
(I −CG)
−1
= I + (X + V Q)(Y − UV
−1
X)
−1
UV
−1
,
(I −CG)
−1
C = (X + V Q)(Y − UV
−1
X)
−1
,
(I −GC)
−1
G = (Y + UQ)(Y − UV
−1
X)
−1
UV
−1
,
(I −GC)
−1
= (Y + UQ)(Y − UV
−1
X)
−1
,
линейно зависят от Q, в то время как регулятор C входит в них нелинейным образом.
Поэтому разного рода задачи оптимального управления, которые мы будем решать
в следующей главе, приводят к выпуклым задачам относительно параметра Юлы, а
попытка рассматривать непосредственно регулятор C в качестве переменной приводит
к трудным невыпуклым задачам.
Сопутствующие функции Matlab:
youla (RCT) — параметризация Юлы.
4.3 Размещение полюсов
Во многих случаях с помощью обратной связи можно не только стабилизировать
систему, но добиться любого заданного размещения полюсов замкнутой системы. Ина-
че говоря, можно получить любой желаемый характеристический полином замкнутой
системы. Приведем основной результат такого типа для систем с одним управлением,
заданных описанием в пространстве состояний:
˙x = Ax + bu, x ∈ R
n
, u ∈ R
1
, b ∈ R
n
. (4.17)
Мы ищем управление в форме статической обратной связи по состоянию
u = k
T
x, k ∈ R
n
,
тогда матрица замкнутой системы равна
A
c
= A + b k
T
. (4.18)
Пусть Λ — произвольный набор из n точек λ
i
∈ C, i = 1, . . . , n, удовлетворяющий
единственному условию: если λ
i
∈ Λ, то и λ
∗
i
∈ Λ. Тогда полином
P
0
(s) =
n
Y
i=1
(s − λ
i
)
.
= s
n
+ p
n
s
n−1
+ . . . + p
2
s + p
1
имеет вещественные коэффициенты. Обратно, любому полиному с вещественными ко-
эффициентами отвечает множество Λ его корней.
116 Глава 4. Стабилизация
Теорема 30 Пусть пара (A, b) управляема. Тогда найдется такое k ∈ R
n
, что у мат-
рицы A
c
(4.18) собственные значения совпадают с Λ.
Доказательство. Мы знаем (см. Лемму П.11 из Приложения), что управляемую систе-
му с одним управлением можно привести к канонической форме путем невырожденного
преобразования переменных, т.е. найдется невырожденная матрица T вида (П.9) такая,
что для
e
x
.
= T x система (4.17) приобретает вид
˙
e
x =
e
A
e
x +
e
b u,
e
A = T AT
−1
,
e
b = T b,
e
A =
0 1 . . . 0
0 0
.
.
.
0
.
.
.
.
.
.
.
.
.
1
−a
1
−a
2
. . . −a
n
,
e
b =
0
.
.
.
0
1
. (4.19)
Если искать управление в форме u =
e
k
T
e
x,
e
k = (
e
k
1
, . . . ,
e
k
n
)
T
∈ R
n
, то матрица замкнутой
системы выглядит так:
e
A
c
=
e
A +
e
b
e
k
T
=
0 1 . . . 0
0 0
.
.
.
0
.
.
.
.
.
.
.
.
.
1
−a
1
+
e
k
1
−a
1
+
e
k
2
. . . −a
n
+
e
k
n
,
и ее характеристический полином имеет вид
s
n
+ (−a
n
+
e
k
n
)s
n−1
+ . . . + (−a
1
+
e
k
1
).
Выбирая
e
k
i
.
= p
i
+ a
i
, i = 1, . . . , n, получаем, что его коэффициенты совпадают с ко-
эффициентами полинома P
0
(s), т.е. собственные значения
e
A
c
совпадают с Λ. Наконец,
взяв k = T
T
e
k, имеем
e
b
e
k
T
= T b k
T
T
−1
,
e
A
c
= T (A + b k
T
)T
−1
= T A
c
T
−1
,
т.е. матрицы
e
A
c
и A
c
подобны, и их собственные значения совпадают.
Следствие. В предположениях Теоремы 30 замкнутая система может быть сделана
устойчивой с любым расположением полюсов в левой полуплоскости.
Аналогичный результат верен и для систем с многими управлениями; приведем его
без доказательства.
Теорема 31 Пусть пара (A, B) управляема, тогда система
˙x = Ax + Bu (4.20)
путем выбора обратной связи по состоянию u = Kx может приобрести любое рас-
положение собственных значений матрицы A
c
.
= A + BK; в частности, замкнутая
система может быть сделана устойчивой.
4.3. Размещение полюсов 117
Заметим, что утверждение Теорем 30 и 31 справедливо и в обратную сторону: ес-
ли выбором матрицы K можно добиться любого расположения собственных значений
матрицы A + BK, то пара (A, B) управляема.
Совершенно аналогично эти теоремы формулируются (и доказываются) для дис-
кретного случая. Единственная разница — непрерывная система (4.20) заменяется дис-
кретной
x
k
= Ax
k−1
+ Bu
k−1
.
Некоторый новый эффект, которого можно здесь добиться, связан с тем, что у матрицы
A
c
= A + BK все собственные значения можно сделать нулевыми, т.е. ее характери-
стический полином будет иметь вид z
n
= 0. В силу теоремы Кэли-Гамильтона тогда
A
n
c
= 0. Иными словами, мы можем добиться конечной продолжительности процесса.
Теорема 32 Пусть пара (A, B) управляема. Тогда существует такая обратная связь
u = Kx, что для замкнутой системы
x
k
= (A + BK)x
k−1
будет x
n
= 0 при любом x
0
.
Может показаться, что приведенные выше теоремы решают не только задачу стаби-
лизации, но и все разумные задачи теории управления. Например, если в непрерывной
управляемой системе мы хотим как можно быстрее устранить начальное отклонение,
то в соответствии с Теоремой 31 можно было бы так выбрать стабилизирующую обрат-
ную связь u = Kx, чтобы сдвинуть собственные значения λ
i
матрицы A
c
= A + BK
далеко влево: Re λ
i
≤ −σ < 0, σ велико. Действительно, тогда для решения замкнутой
системы ˙x = A
c
x, x(0) = x
0
, имеем (см. (3.4))
|x(t)| ≤ ke
A
c
t
k|x
0
| ≤ Ce
−νt
|x
0
|, C = C(A
,ν),
для любого 0 < ν < σ. Выбирая большие ν, мы, на первый взгляд, за счет экспоненци-
ального члена e
−νt
можем получить сколь угодно малые значения |x(t)| для всех t ≥ T,
где T > 0 сколь угодно мало. Однако за все приходится платить; не является исклю-
чением и данная ситуация. Во-первых, матрица усиления K, для которой собственные
значения матрицы A
c
удовлетворяют условию Re λ
i
≤ −σ, σ велико, может оказаться
очень большой. Поэтому и управление u = Kx может принимать очень большие зна-
чения, в то время как в практических задачах обычно есть ограничения на величину
управления. Вторая неприятность связана с константой C в приведенной выше оценке.
Оказывается, с ростом σ эта величина возрастает; это проявляется в том, что значе-
ния x(t) на начальном интервале не убывают, а возрастают, причем весьма значительно.
Количественное описание этого эффекта “всплеска” дается следующим результатом.
Теорема 33 Существует константа C, зависящая от матрицы A и вектора b, но
не зависящая от σ, такая, что справедлива оценка
max
0≤t≤1/σ
max
|x
0
|=1
|x(t)| ≥ Cσ
n−1
.
Здесь x(t) — решение замкнутой системы ˙x = (A + bk
T
)x, x(0) = x
0
, для которой
Re λ
i
(A + bk
T
) ≤ −σ < 0.
118 Глава 4. Стабилизация
Иначе говоря, если собственные значения матрицы A
c
замкнутой системы сильно
сдвинуты влево, то заведомо найдется такое начальное значение x
0
, |x
0
| = 1, для кото-
рого решение замкнутой системы принимает значения, б´льшие, чем Cσ
n−1
; последняя
величина тем больше, чем больше σ и n. Более того, с ростом σ этот всплеск проявля-
ется на все меньшем временн´м интервале 0 ≤ t ≤ 1/σ.
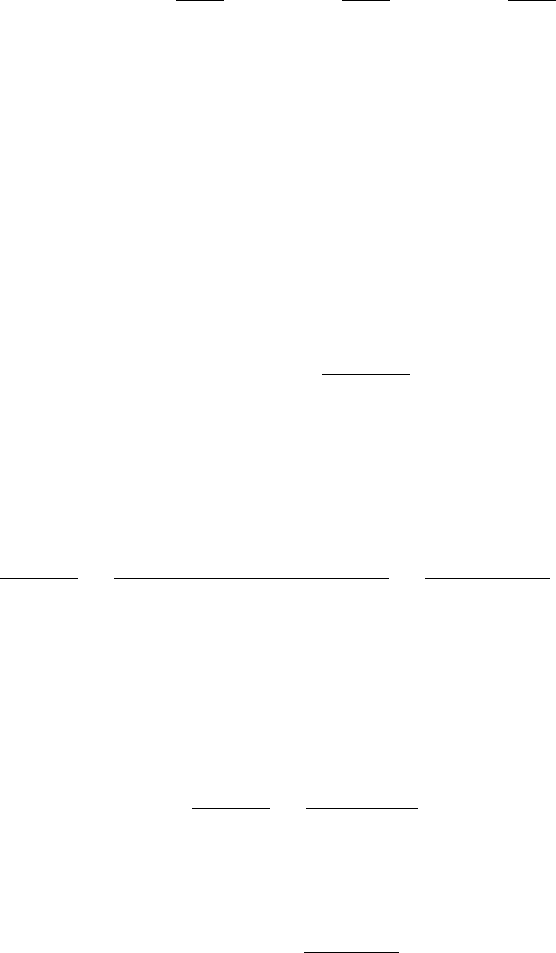
figure=c:/sher/book/figs/4peak.eps,height=2.5in,width=3in
Рис. 4.5: Эффект всплеска: рост x(t) на начальном интервале 0 ≤ t ≤ 0, 5 при x
0
=
(1, 1, . . . , 1).
Приведем простой пример, показывающий, сколь велики могут быть эти нежела-
тельные эффекты. Пусть n = 10, а система уже записана в канонической форме (4.19)
с a
i
= 0, i = 1, . . . , 10. Мы хотим, чтобы у характеристического полинома замкнутой
системы все корни были равны −2 (т.е. σ = 2, — сравнительно небольшая величина);
иными словами, P
0
(s) = (s + 2)
10
, и k
i
должны выбираться равными коэффициентам
этого полинома: k
i
= C
i−1
10
2
11−i
. Наибольший из них k
4
= C
3
10
2
7
= 15360. Таким обра-
зом, коэффициенты усиления в цепи обратной связи превышают 1, 5 · 10
4
. Более того,
например, при x
0
= (1, 1, . . . , 1) десятая компонента x
(10)
(t) решения x(t) замкнутой
системы достигает значения x
(10)
(t) ≈ 2030 при t = t
peak
≈ 0, 4275, т.е. начальное зна-
чение возрастает более чем в 2000 раз прежде, чем начать убывать (это не противоре-
чит устойчивости системы — (t) действительно стремится к нулю при больших t, см.
рис. 4.5).
Таким образом, влияние плохих начальных условий на поведение невозмущенной
системы проявляется в виде всплеска. Этот эффект имеет ту же природу, что и хоро-
шо известное в теории управления перерегулирование, т.е. всплескообразная реакция
системы с нулевыми начальными условиями на единичное входное воздействие
u(t) = 1(t) =
(
0 при t < 0,
1 при t ≥ 0.
В самом деле, обозначим решение устойчивой системы
˙x = Ax + b 1(t), x(0) = 0, (4.21)
через x:
x(t) = −A
−1
b + e
At
A
−1
b,
и
x = −A
−1
b
— его установившееся значение, т.е. x(t) → x при t → ∞. Перерегулированием называют
величину
ζ
.
= sup
t
|x(t) − x|
|x|
,
она характеризует максимальное отклонение траектории возмущенной системы от уста-
новившегося значения. Пусть теперь |x
0
| = 1 — начальные условия невозмущенной си-
стемы, которые в соответствии с Теоремой 33 выбраны так, чтобы вызвать большой

4.3. Размещение полюсов 119
всплеск ее траектории x(t) = e
At
x
0
. Положив в (4.21) b = Ax
0
, получаем x = −x
0
и
ζ = sup
t
|x(t) − x| = sup
t
|e
At
x
0
|,
т.е. перерегулирование в системе (4.21) велико.
Перейдем теперь к другой задаче — стабилизации с помощью обратной связи по
выходу. В этом случае для той же системы
˙x = Ax + Bu, x(0) = x
0
,
доступен лишь выход
y = Cx.
Можно было бы думать, что если система управляема и наблюдаема, то статическая
обратная связь
u = Ky (4.22)
может стабилизировать систему. Однако, легко видеть, что это совершенно не так (см.
раздел 2.3). Покажем, что стабилизация все же возможна, если брать не статический
регулятор (4.22), а динамический, т.е. использующий наблюдатель и обратную связь по
оценке состояния, описанные в разделе 2.3. Итак, наряду с системой
˙x = Ax + Bu,
y = Cx
(4.23)
запишем дифференциальное уравнение для наблюдателя
˙
b
x = A
b
x + Bu + F (y −C
b
x) (4.24)
и будем искать обратную связь в виде
u = K
b
x.
Тогда, исключая u и y из уравнений, получаем
˙x = Ax + BK
b
x,
˙
b
x = (A − F C)
b
x + F Cx + BK
b
x,
и, вводя невязку e
.
= x −
b
x, перепишем эти уравнения в виде
˙x = (A + BK)x − BKe,
˙e = (A − F C)e
или
˙z = A
c
z, z =
Ã
x
e
!
.
Здесь блочная матрица
A
c
=
Ã
A + BK −BK
0 A − F C
!
имеет те же собственные значения, что и стоящие на диагонали матрицы A + BK,
A − F C. По Теореме 31 они могут быть выбраны произвольно (см. также замечание
после Теоремы 3). Итак, мы пришли к следующему результату.
120 Глава 4. Стабилизация
Теорема 34 Пусть система (4.23) управляема и наблюдаема. Тогда можно выбрать
матрицы K и F так, что обратная связь u = K
b
x с наблюдателемb(4.24) стабилизи-
рует систему.
Таким образом, для управляемых систем всегда можно добиться стабилизации в ви-
де статической обратной связи по состоянию, а для управляемых и наблюдаемых систем
— с помощью динамической обратной связи по выходу с использованием наблюдателя.
Сопутствующие функции Matlab:
place (CST) — решение задачи о расположении корней;
acker (CST) — решение задачи о расположении корней для систем с одним входом (4.17);
initial (CST) — расчет отклика невозмущеннной системы на начальные условия.
4.4 Квадратичная стабилизация
Другой подход к задаче стабилизации основан на том, что если система устойчива,
то у нее есть квадратичная функция Ляпунова вида
V (x) = x
T
P x, P > 0. (4.25)
Таким образом, для задачи
˙x = Ax + Bu (4.26)
с обратной связью по состоянию
u = Kx (4.27)
замкнутая система имеет вид
˙x = A
c
x, A
c
= A + BK,
и функция (4.25) является для нее функцией Ляпунова тогда и только тогда, когда (см.
раздел 3.1)
A
T
c
P + P A
c
< 0,
т.е. если найдутся K и P > 0 такие, что
(A + BK)
T
P + P (A + BK) < 0. (4.28)
В этом соотношении две матричных переменных P и K, и они входят в неравенство
нелинейным образом. От этого можно избавиться, сделав замену переменных
Y
.
= KQ, Q = P
−1
.
Умножив матричное неравенство (4.28) слева и справа на Q = P
−1
(см. Приложение,
раздел 2), получим
QA
T
+ AQ + Y
T
B
T
+ BY < 0, Q > 0. (4.29)