Поляк Б.Т., Щербаков П.С. Робастная устойчивость и управление
Подождите немного. Документ загружается.


4.4. Квадратичная стабилизация 121
Это неравенство является уже линейным по переменным Y, Q. Оказывается, из него
можно исключить матрицу Y . В самом деле, квадратичная форма
f(x)
.
= x
T
(Y
T
B
T
+ BY )x = (B
T
x, Y x)
обращается в нуль на подпространстве B
T
x = 0. По лемме Финслера (Лемма П.2 из
Приложения) найдется такое γ > 0, что f(x) + γkB
T
xk
2
≥ 0 для всех x, т.е.
Y
T
B
T
+ BY ≥ −γBB
T
. (4.30)
Поэтому если выполняется неравенство (4.29), то тем более
QA
T
+ AQ − γBB
T
< 0. (4.31)
Обратно, если мы решим линейное матричное неравенство (4.31), то взяв Y
.
= −
γ
2
B
T
,
мы получим равенство в (4.30), и тем самым и неравенство (4.29) будет удовлетворено.
Поскольку K = Y Q
−1
не меняется при выборе γ, можно взять γ = 2. Окончательно
приходим к следующему результату.
Теорема 35 Если Q — решение матричного неравенства Ляпунова
QA
T
+ AQ − 2BB
T
< 0, Q > 0,
то регулятор (4.27) с матрицей
K = −B
T
Q
−1
стабилизирует систему (4.26), а квадратичная форма
V (x) = x
T
Q
−1
x
является функцией Ляпунова для замкнутой системы.
Описанный выше подход, основанный на поиске квадратичной функции Ляпунова
(и потому называемый квадратичной стабилизацией ) на первый взгляд выглядит до-
вольно искусственным. Он не дает решения в явном виде, а сводит задачу к решению
линейных матричных неравенств. Однако впоследствии (см. раздел 8.2) мы убедимся,
что именно такая техника особенно эффективна для задач робастной стабилизации,
когда требуется стабилизировать систему при наличии неопределенности.
Сопутствующие функции Matlab:
lyap, dlyap (CST) — решение уравнения Ляпунова в непрерывном и дискретном вре-
мени.
122 Глава 4. Стабилизация
4.5 Сверхстабилизация
Все приведенные выше методы ставили целью сделать систему устойчивой путем
введения обратной связи. Однако можно решать более жесткую задачу и пытаться
обеспечить сверхустойчивость замкнутой системы (см. раздел 3.6). Оказывается, что
этой цели не всегда можно добиться (например, не всякая управляемая система может
быть сделана сверхустойчивой), в то же время, если решение существует, то оно легко
может быть найдено. Мы начнем сразу с более трудной задачи стабилизации по выходу.
Задана система
˙x = Ax + Bu,
y = Cx;
ищется статический регулятор в форме обратной связи по выходу
u = Ky, (4.32)
обеспечивающий сверхустойчивость замкнутой системы. Напомним, что для задачи ста-
билизации по выходу мы исследовали динамический регулятор, использующий наблю-
датель (раздел 4.3); задача о статическом регуляторе остается открытой (см. обсужде-
ние этой проблемы в разделе 2.3 и ниже, в Гл. 9). Вопрос о существовании и отыскании
регулятора K (4.32), гарантирующего сверхустойчивость, решается очень просто. Мат-
рица замкнутой системы (которую мы в этом разделе обозначим M, а не A
c
, как ранее)
равна
M = A + BKC.
Ее элементы m
ij
, i, j = 1, . . . , n, являются аффинными функциями от K = ((k
ij
)):
m
ij
.
= m
ij
(K) = a
ij
+ (BKC)
ij
= a
ij
+ b
i
Kc
j
,
где b
i
— i-я строка матрицы B, c
j
— j-й столбец матрицы C. Например, в задаче ста-
билизации по состоянию для системы с одним входом имеем y = x, m = 1, т.е. C = I,
B = (b
1
, . . . , b
n
)
T
— вектор-столбец, а K = (k
1
, . . . , k
n
) — вектор-строка, поэтому
M = A + BK, m
ij
= a
ij
+ b
i
k
j
,
где b
i
— i-й элемент B, а k
j
— j-й элемент K (матрица BK — первого ранга).
Условие сверхустойчивости матрицы M имеет вид
−m
ii
>
X
j6=i
|m
ij
|, i = 1, . . . , n.
Введем искусственные переменные σ, n
ij
, i, j = 1, . . . , n; тогда условие сверхустойчиво-
сти можно записать так:
σ > 0,
−m
ii
(K) −
X
j6=i
n
ij
≥ σ, i = 1, . . . , n,
−n
ij
≤ m
ij
(K) ≤ n
ij
, i, j = 1, . . . , n, i 6= j.
4.5. Сверхстабилизация 123
Если эта система линейных неравенств имеет решение k
ij
, n
ij
, i, j = i, . . . , n, при неко-
тором σ > 0, то система сверхустойчива. Чтобы проверить существование решения,
можно перейти к задаче линейного программирования
max σ,
−m
ii
(K) −
X
j6=i
n
ij
≥ σ, i = 1, . . . , n,
−n
ij
≤ m
ij
(K) ≤ n
ij
, i, j = 1, . . . , n, i 6= j;
(4.33)
в ней переменными являются матрицы K, N
.
= ((n
ij
)) и скаляр σ.
Теорема 36 Если K, σ — решение задачи (4.33) и σ > 0, то обратная связь u = Ky
обеспечивает сверхустойчивость замкнутой системы. Если же σ ≤ 0, то сверхста-
билизация регулятором вида (4.32) невозможна.
Этот результат дает полное решение задачи о сверхстабилизирующем статическом
регуляторе.
Рассмотрим простой пример. Пусть n = 2, m = 1, т.е.
˙x = Ax + Bu, A =
Ã
a
11
a
12
a
21
a
22
!
, B
.
= b =
Ã
b
1
b
2
!
, u = Kx, K
.
= k = (k
1
k
2
).
Тогда
M = A + BK =
Ã
a
11
+ b
1
k
1
a
12
+ b
1
k
2
a
21
+ b
2
k
1
a
22
+ b
2
k
2
!
,
и условие сверхустойчивости принимает вид
a
11
+ b
1
k
1
< −|a
12
+ b
1
k
2
|, a
22
+ b
2
k
2
< −|a
21
+ b
2
k
1
|.
Возьмем для определенности b
1
= b
2
= 1; нас интересует, существуют ли k
1
, k
2
, удовле-
творяющие неравенствам
a
11
+ k
1
< −|a
12
+ k
2
|, a
22
+ k
2
< −|a
21
+ k
1
|.
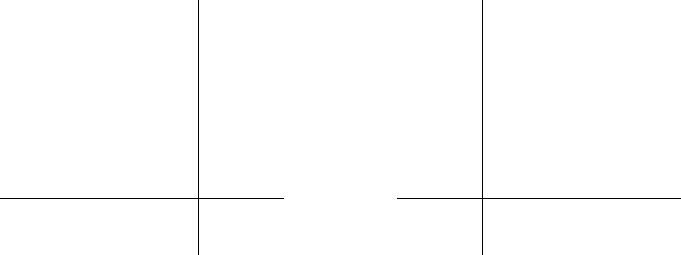
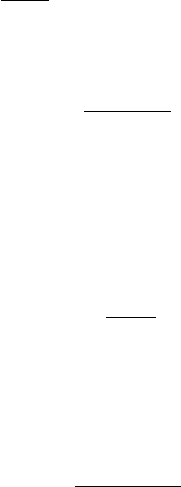
Каждое из неравенств выделяет прямой угол на плоскости {k
1
, k
2
} (рис. 4.6). Эти пря-
мые углы содержат общую точку (т.е. решение существует), если и только если вершина
одного из них лежит в другом, т.е. удовлетворяется одно из неравенств
a
11
− a
21
< −|a
12
− a
22
|, a
22
− a
12
< −|a
21
− a
11
|.
Это возможно тогда и только тогда, когда
τ
.
= a
11
− a
21
+ a
22
− a
12
< 0.
Итак, если τ < 0, то сверхстабилизация возможна, если τ ≥ 0, то она невозможна.
Мы видим, что не для любой матрицы A можно обеспечить сверхустойчивость; в то
124 Глава 4. Стабилизация
-
k
1
6
k
2
r
−a
11
r
−a
12
r
¡
¡
¡
¡
¡
¡
@
@
@
@
@
@
90
o
-
k
1
6
k
2
r
−a
21
r
−a
22
r¡
¡
¡
¡
¡
¡
@
@
@
@
@
@
90
o
Рис. 4.6: Коэффициенты сверхстабилизирующего регулятора.
же время для любой A, для которой b = (1 1)
T
не является собственным вектором,
пара (A, b) управляема и (обычная) стабилизация с помощью обратной связи u = kx
возможна (Теорема 30 и следствие из нее).
Легко выявить и случаи, когда сверхстабилизация заведомо невозможна. Пусть в
общей задаче
˙x = Ax + bu, u = kx, x ∈ R
n
, u ∈ R
1
,
вектор b имеет некоторые координаты нулевыми, например, b
1
= 0. Тогда M = A + bk
имеет такую же первую строку, как и A; если эта строка не удовлетворяла условию
сверхустойчивости, т.е. −a
11
≤
P
j6=1
|a
1j
|, то матрица M не будет сверхустойчивой ни
при каком k. Отсюда, в частности, следует, что для системы, записанной в канониче-
ской управляемой форме (см. раздел 1.4), заведомо нельзя добиться сверхустойчивости
с помощью обратной связи по состоянию. Ситуация может измениться, если произве-
сти замену переменных — в новых координатах сверхустойчивость, возможно, удастся
обеспечить, см. стр. 94.
Все сказанное выше относилось к непрерывным системам; при переходе к дискрет-
ному случаю изменения минимальны. Они связаны с тем, что для системы
x
k
= Ax
k−1
+ Bu
k−1
,
y
k
= Cx
k
с обратной связью
u
k
= Ky
k
условие сверхустойчивости матрицы M = A + BKC записывается как kMk
1
< 1, т.е.
n
X
j=1
|m
ij
(K)| < 1, i = 1, . . . , n.
Относительно элементов матрицы K эти условия также записываются как линейные
4.6. Выводы 125
неравенства. Задача линейного программирования, аналогичная (4.33), имеет вид
min σ,
X
j
n
ij
≤ σ, i = 1, . . . , n,
−n
ij
≤ m
ij
(K) ≤ n
ij
, i, j = 1, . . . , n,
(4.34)
а возможность сверхстабилизации дается следующим результатом.
Теорема 37 Пусть K, σ — решение задачи линейного программирования (4.34). Ес-
ли σ < 1, то регулятор u = Ky обеспечивает сверхустойчивость матрицы M =
A + BKC замкнутой системы: kMk
1
< 1; если же σ ≥ 1, то M не является свер-
хустойчивой ни при каком K.
Сопутствующие функции Matlab:
linprog (OT) — решение задачи линейного программирования.
4.6 Выводы
• При задании одномерного объекта с помощью реализуемой передаточной функции
G(s) = A(s)/B(s) в ряде случаев возможно использование регуляторов низкого
порядка в цепи обратной связи.
При использовании простейшего пропорционального регулятора (П-регулятора)
C(s) = k выбору подлежит один параметр — коэффициент усиления k > 0. В слу-
чае устойчивого объекта (полином B(s) устойчив) вопрос о критическом коэффи-
циенте усиления k — минимальном значении k, при котором характеристический
полином P (s) = B(s) + kA(s) замкнутой системы теряет устойчивость — реша-
ется с помощью годографа Найквиста (Теорема 23). При этом говорят о малом
коэффициенте усиления. Если годограф G(jω) не пересекает отрицательную по-
луось, то устойчивость замкнутой системы сохранятся при сколь угодно больших
коэффициентах усиления.
В случае минимальнофазового объекта (полином A(s) устойчив) вопрос о k —
минимальном значении k, при котором P (s) = B(s) + kA(s) приобретает устойчи-
вость — решается с помощью обратного годографа Найквиста; при этом решение
существует лишь если степень B(s) превышает степень A(s) не более чем на 2
(Теорема 24). При этом говорят о большом коэффициенте усиления. В дискрет-
ном случае картина та же, но нет требований на степени B(z) и A(z) (Теорема 25).
• При использовании регулятора, зависящего от двух параметров (например, ПИ-
регулятора), исследовать устойчивость замкнутой системы можно с помощью тех-
ники D-разбиения. При этом на плоскости параметров явно выделяются области
126 Глава 4. Стабилизация
D(p), для которых характеристический полином замкнутой системы имеет ров-
но p устойчивых корней, и, в частности, область устойчивости, отвечающая всем
устойчивым корням. Техника D-разбиения равно применима и в дискретном слу-
чае.
В целом сказать заранее, можно ли данный объект стабилизировать с помощью
регулятора низкого порядка, не удается.
• Все регуляторы C(s) (без ограничения на структуру), стабилизирующие непре-
рывную одномерную систему с передаточной функцией
G(s) =
A(s)
B(s)
, deg A ≤ deg B,
где полиномы A(s), B(s) взаимно просты, описываются Теоремой 27:
C(s) =
X + V Q
Y − UQ
.
Здесь Q(s) ∈ RH
∞
— произвольна, а X = X(s), Y = Y (s) ∈ RH
∞
— решение
уравнения UX + V Y = 1, где U = U(s) = A(s)/F (s), V = V (s) = B(s)/F (s), а
F (s) — произвольный устойчивый полином, deg F ≥ deg B.
В случае дискретной системы
G(z) =
A(z)
B(z)
задача упрощается, и все стабилизирующие регуляторы C(z) описываются через
решение X(z), Y (z) полиномиального уравнения AX + BY = 1 (оно существует,
если полиномы A(z), B(z) взаимно просты) следующим образом:
C(z) =
P X + BR
P Y − AR
,
где P = P (z) — дискретно-устойчивый полином, а R = R(z) — произвольный
полином (Теорема 28).
• В многомерном случае рассматривают матричную передаточную функцию G(s),
задаваемую с помощью несократимого левого или правого разложения:
G(s) = U(s)V
−1
(s) =
b
V
−1
(s)
b
U(s),
где U, V и
b
U,
b
V — матричные функции из RH
∞
— таковы, что уравнения UX +
V Y = I и
c
X
b
U +
b
Y
b
V = I разрешимы в RH
∞
. Тогда все стабилизирующие регуля-
торы C(s) (т.е. обеспечивающие внутреннюю устойчивость замкнутой системы)
имеют вид
C = (X + V Q)(Y + UQ)
−1
= (
b
Y + Q
b
U)
−1
(
c
X + Q
b
V ),
где Q ∈ RH
∞
— произвольно (Теорема 29). Такое представление всех стабили-
зирующих регуляторов называется параметризацией Юлы, а матрица Q — па-
раметром Юлы. Преимущество такой параметризации в том, что передаточные
функции замкнутой системы линейно зависят от Q, в то время как регулятор C
входит в них нелинейным образом.
4.6. Выводы 127
• Если в системе ˙x = Ax + Bu пара (A, B) управляема, то с помощью статической
обратной связи по состоянию u = Kx можно добиться произвольного располо-
жения собственных значений матрицы замкнутой системы A
c
= A + BK — это
задача о размещении полюсов, — в частности, можно сделать систему устойчивой
(Теорема 31). Однако, попытка увеличить таким образом степень устойчивости
(отодвинуть λ
i
(A
c
) как можно более влево), требует больших управлений и при-
водит к эффекту всплеска траектории — резкому росту |x(t)| на начальном этапе
(Теорема 33). В системах с единичным входным воздействием u(t) = 1(t) этот
эффект называется перерегулированием.
Аналогичный результат о размещении полюсов справедлив в дискретном случае,
но, кроме этого, выбором матрицы усиления можно добиться конечной продол-
жительности процесса, сделав нулевыми все λ
i
(A
c
).
• Если в управляемой системе ˙x = Ax + Bu доступен лишь выход y = Cx, и пара
(A, C) наблюдаема, то такую систему можно стабилизировать с помощью дина-
мической обратной связи по оценке состояния u = K
b
x с использованием наблю-
дателя
˙
b
x = A
b
x + Bu + F (y −C
b
x) (Теорема 34).
• Квадратичная стабилизация заключается в поиске квадратичной функции Ляпу-
нова для замкнутой системы с матрицей A
c
.
= A+BK. При этом стабилизирующий
регулятор u = Kx ищется не в явном виде, а через решение неравенства Ляпунова
(Теорема 35). Такой подход плодотворен в задачах робастной стабилизации.
• При замыкании системы обратной связью по выходу u = Ky элементы матри-
цы A
c
= A + BKC замкнутой системы представляют собой линейные функции
от элементов матрицы усиления K = ((k
ij
)), и условие сверхустойчивости A
c
формулируется в терминах линейных неравенств относительно k
ij
. Поэтому ес-
ли соответствующая задача линейного программирования имеет решение, то раз-
решима задача сверхстабилизации непрерывной системы по выходу с помощью
статического регулятора u = Ky (Теорема 36). Аналогично решается задача о
сверхстабилизации по состоянию. Рзультат для дискретных систем дается Теоре-
мой 37.
Сверхстабилизация — более жесткое требование, чем стабилизация, поэтому не
всякая стабилизируемая система (например, управляемая и наблюдаемая) сверх-
стабилизируема. Ситуация может измениться при переходе к другим координатам.
128 Глава 4. Стабилизация
Глава 5
Оптимальное управление
Условие устойчивости замкнутой системы, исследовавшееся в предыдущей главе,
является необходимым требованием при выборе закона управления. Однако стабили-
зирующих управлений много, и мы можем выбрать среди них то, которое оптимально
с точки зрения некоторого критерия, характеризующего качество управления. В этой
главе мы рассмотрим ряд важнейших критериев оптимальности и обсудим технику по-
лучения оптимального управления.
5.1 Линейно-квадратичный регулятор
Задана линейная стационарная система в пространстве состояний:
˙x = Ax + Bu, A ∈ R
n×n
, B ∈ R
n×m
(5.1)
с фиксированным начальным условием
x(0) = x
0
. (5.2)
Требуется найти закон управления в форме линейной обратной связи по состоянию
u = Kx, K ∈ R
m×n
, (5.3)
который минимизирует квадратичный критерий качества
J
.
=
∞
Z
0
h
(Rx, x) + (Su, u)
i
dt. (5.4)
Здесь R ∈ R
n×n
, S ∈ R
m×m
— положительно определенные матрицы, так что J ≥ 0. Оче-
видно, что для того, чтобы функционал J был конечен, необходимо, чтобы замкнутая
система была устойчива; это же условие и достаточно для конечности J. Критерий (5.4)
гарантирует малость как состояний замкнутой системы, так и применяющихся управле-
ний (за счет больших управлений можно добиться, чтобы x(t) быстро убывал, однако
тогда член (Su, u) будет велик). Матрицы R и S играют роль весовых коэффициен-
тов, учитывающих оба указанных фактора. Приведенная выше задача является одной
129

130 Глава 5. Оптимальное управление
из основных в теории управления; в отечественной литературе она иногда называет-
ся задачей об аналитическом конструировании регуляторов, в западной — задачей о
линейно-квадратичном регуляторе (LQR — Linear Quadratic Regulator). Существуют
также постановки задачи LQR и в частотной области; методы решения используют па-
раметризацию Юлы и в них проводится оптимизация критерия по параметру Юлы Q.
Ввиду важности задачи, рассмотрим несколько подходов к ее решению. Каждый из
них представляет самостоятельный интерес и может быть обобщен на другие постанов-
ки задачи; кроме того, аналитическая форма получаемого решения также различна.
Всюду далее принято следующее предположение: пара (A, B) управляема, а матри-
цы R и S положительно определены. Это предположение может быть ослаблено, но мы
проанализируем задачу в этом простейшем случае.
Сопутствующие функции Matlab:
lqr, dlqr (CST) — построение линейно-квадратичного регулятора для непрерывной и
дискретной системы.
5.1.1 Принцип максимума
Видоизменим несколько постановку задачи, считая конечной продолжительность T
процесса; при этом не будем требовать, чтобы управление имело вид (5.3), а будем
искать его в форме программного управления u(t):
min
u
J(u), J(u) =
T
Z
0
h
(Rx, x) + (Su, u)
i
dt,
˙x = Ax + Bu, x(0) = x
0
, 0 ≤ t ≤ T.
(5.5)
Нетрудно показать, что в силу условий функционал J(u) имеет единственную точку
минимума u(t) на гильбертовом пространстве U функций u(t) в L
2
(0, T ).
1
Пусть x(t) —
решение системы (5.1), соответствующее этому управлению u(t):
˙x(t) = Ax(t) + Bu(t), x(0) = x
0
.
Дадим оптимальному управлению u(t) некоторое приращение δu(t): u
.
= u + δ u; тогда
оптимальная траектория x(t) также получит приращение δx(t): x
.
= x + δx, которое
будет описываться дифференциальным уравнением с нулевым начальным условием:
δ ˙x = Aδx + Bδu, δx(0) = 0, (5.6)
а функционал J будет иметь вид
J(u) = J(u) + 2
T
Z
0
h
(Rx, δx) + (Su, δu)
i
dt + ε,
1
Аналогично пространству L
2
, введенному в разделе 1.3, L
2
(0, T ) — пространство измеримых функ-
ций u(t), определенных при t ∈ [0, T ] и имеющих ограниченную 2-норму: kuk
2
.
=
³
T
R
0
|u(t)|
2
2
dt
´
1/2
< ∞.