Поляк Б.Т., Щербаков П.С. Робастная устойчивость и управление
Подождите немного. Документ загружается.


7.6. Выводы 201
при этом радиус сверхустойчивости γ
∗
находится в явном виде. Аналогичные
формулы справедливы и в дискретном случае: если kA
0
k
1
< 1, то семейство мат-
риц остается сверхустойчивым при
γ < γ
∗
.
=
1 − kA
0
k
1
n
.
• При задании матричной неопределенности в виде ограничений на спектральную
норму возмущения
A = A
0
+ ∆, k∆k ≤ γ
нахождение радиуса устойчивости — максимального значения γ = γ
max
, при ко-
тором все возмущения k∆k < γ
max
не нарушают устойчивости A
0
, — зависит от
типа возмущений.
Если возмущения ∆ комплексные, то выражение для комплексного радиуса устой-
чивости γ
max
.
= γ
c
max
дается Теоремой 50. При этом дестабилизирующее возмуще-
ние при γ ≥ γ
c
max
может быть взято в виде матрицы ранга один.
Если допускать лишь вещественные возмущения ∆, то нахождение вещественно-
го радиуса устойчивости γ
max
.
= γ
r
max
усложняется; выражение для γ
r
max
дается
Теоремой 52. Дестабилизирующими возмущениями являются матрицы второго
ранга.
Аналогичные результаты справедливы для дискретных систем, т.е. матриц, устой-
чивых по Шуру.
• Для одномерных систем с частотной неопределенностью вопрос о робастной устой-
чивости решается с помощью робастного аналога критерия Найквиста (Теоре-
ма 55).
Для многомерных систем основным техническим аппаратом исследования устой-
чивости при частотной неопределенности является теорема о малом коэффициен-
те усиления. Пусть M(s) — матричная передаточная функция из RH
∞
, ∆(s) —
матричное частотное возмущение из RH
∞
, ограниченное в H
∞
-норме: k∆(s)k
∞
≤
1/γ. Тогда матричная функция
³
I +M(s)∆(s)
´
−1
определена и принадлежит RH
∞
тогда и только тогда, когда kM(s)k
∞
≤ γ (Теорема 56). Отсюда можно получить
разнообразные критерии робастной устойчивости при частотной неопределенно-
сти. Типичные результаты приведены в Теореме 57. Пусть объект имеет адди-
тивную неопределенность: G = G
0
+ W
1
∆W
2
, а регулятор C(s) помещен в цепи
обратной связи. Тогда замкнутая система устойчива при всех k∆(s)k
∞
≤ 1, если
kW
1
CSW
2
k
∞
< 1, где S = (I +G
0
C)
−1
— чувствительность номинального объекта.
• Общая схема исследования робастной устойчивости дается так называемым µ-
анализом. Он основан на понятии структурного сингулярного числа матрицы. В
µ-анализе система приводится к стандартной M–∆ конфигурации, где все неопре-
деленности ∆ включены в цепь искусственной обратной связи, а M — номиналь-
ная замкнутая система (включающая номинальный объект, регулятор и обратную
202 Глава 7. Робастная устойчивость
связь). Матричная неопределенность ∆(s) имеет некоторую структуру (в ней мо-
гут быть блоки, отвечающие вещественной или комплексной параметрической или
матричной неопределенности, частотной неопределенности). Число µ(M) опреде-
ляется как обратное к минимальной норме ∆ заданной структуры, при которой
матрица I + M∆ становится вырожденной. Для вычисления µ(M) существуют
численные методы, основанные на верхних и нижних границах для µ(M). Общий
критерий робастной устойчивости для M–∆ конфигурации дается Теоремой 59,
обобщающей теорему о малом коэффициенте усиления.
• Теория робастной устойчивости опирается на минимаксный подход — требуется
сохранение устойчивости при любой допустимой неопределенности. Однако мож-
но считать неопределенность случайной, а систему робастно устойчивой, если она
сохраняет устойчивость с вероятностью, близкой к единице. Такой вероятност-
ный подход имеет ряд преимуществ. В частности, можно применить метод Монте-
Карло для прямой проверки вероятностной устойчивости. Вероятностный радиус
устойчивости часто оказывается заметно б´льшим, чем детерминированный.
Глава 8
Робастная стабилизация и управление
В этой главе мы проанализируем каким образом методы стабилизации и оптималь-
ного управления, рассмотренные в Главах 4 и 5, могут быть обобщены на задачи с
неопределенностями различных видов. Разумеется, не все описанные там методы до-
пускают “робастизацию”. Например, подход с помощью размещения полюсов системы
(раздел 4.3) имеет смысл только для фиксированной системы. С другой стороны, воз-
можны и специальные постановки задач, связанные с робастностью, например, задача
о максимальной робастности (раздел 8.4).
8.1 Робастная стабилизация с помощью регуляторов
низкого порядка
Как и в разделе 4.1, мы займемся вначале задачей стабилизации одномерного объ-
екта с передаточной функцией
G(s) =
A(s)
B(s)
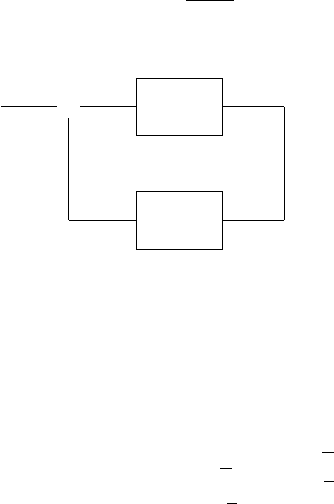
с помощью скалярного коэффициента усиления k в цепи обратной связи.
-
N
-
-
G(s)
¾
k
6
Рис. 8.1: Стабилизация неопределенного объекта скалярной обратной связью.
Однако, здесь, в отличие от раздела 4.1, G(s) не предполагается фиксированной,
а содержит некоторую неопределенность. Для примера будем считать, что A и B —
интервальные полиномы:
A(s) = a
0
+ a
1
s + . . . + a
m
s
m
, a
i
≤ a
i
≤ a
i
, i = 1, . . . , m;
B(s) = b
0
+ b
1
s + . . . + b
n
s
n
, b
i
≤ b
i
≤ b
i
, i = 1, . . . , n.
203
204 Глава 8. Робастная стабилизация и управление
Характеристический полином замкнутой системы
P (s) = B(s) + kA(s)
при фиксированном коэффициенте усиления k также будет интервальным полиномом
с коэффициентами p
i
= b
i
+ ka
i
, i = 1, . . . , n (мы предполагаем, что n ≥ m и дополняем
a
i
= 0 для m < i ≤ n). По теореме Харитонова 44 P (s) устойчив в том и только в том
случае, когда устойчивы четыре харитоновских полинома
P
i
(s) = B
i
(s) + kA
i
(s), i = 1, . . . , 4,
где A
i
(s), B
i
(s) — харитоновские полиномы для интервальных семейств A(s), B(s) (см.
раздел 7.1). Используя Теоремы 23 и 24 о стабилизации устойчивых и минимальнофа-
зовых объектов, получаем их робастные аналоги.
Теорема 61 Пусть полиномы B
i
(s), i = 1, . . . , 4, устойчивы. Тогда система на рис. 8.1
робастно стабилизируется при 0 ≤ k < k
.
= min
1≤i≤4
k
i
, где k
i
= −1/κ
i
, а κ
i
— точка
самого левого пересечения i-го годографа Найквиста G
i
(jω) = A
i
(jω)/B
i
(jω) с отрица-
тельной вещественной полуосью.
Теорема 62 Пусть полиномы A
i
(s), i = 1, . . . , 4, устойчивы, a
m
> 0, и выполнено
любое из условий
а). n = m,
б). n = m + 1, b
n
> 0,
в). n = m + 2, b
n
> 0, b
n−1
> 0, a
m
b
n−1
> a
m−1
b
n
.
Тогда система на рис. 8.1 робастно стабилизируется при k > k
.
= max
1≤i≤4
k
i
, где k
i
=
−1/ν
i
, а ν
i
— точка самого левого пересечения i-го обратного годографа Найквиста
H
i
(jω) = B
i
(jω)/A
i
(jω) с отрицательной вещественной полуосью.
Таким образом, робастно устойчивые и робастно минимальнофазовые объекты мож-
но робастно стабилизировать с помощью постоянной обратной связи (в первом случае
с помощью малого, а во втором случае — большого коэффициента усиления). При этом
для отыскания критического значения коэффициента усиления k достаточно постро-
ить четыре харитоновских годографа, соответствующих либо прямым, либо обратным
годографам Найквиста.
Сходным образом допускает робастное обобщение и техника, основанная на D-раз-
биении по двум параметрам, описанная в разделе 4.1. Как мы видели, для регуляторов,
зависящих от двух параметров k
1
, k
2
, характеристический полином принимает вид (4.4):
P (s, k) = P
0
(s) + k
1
P
1
(s) + k
2
P
2
(s), k = (k
1
, k
2
).
где полиномы P
0
(s), P
1
(s), P
2
(s) линейно зависят от A(s) и B(s). Например, для ПИ-
регулятора
C(s) = k
1
+ k
2
/s
получаем
P (s, k) = B(s)s + k
1
A(s)s + k
2
A(s).
8.1 РЕГУЛЯТОРЫ НИЗКОГО ПОРЯДКА 205
Чтобы выявить более четко идею метода, рассмотрим простейший случай, когда
полиномы P
1
и P
2
фиксированы, а P
0
— интервальный полином. В приведенном вы-
ше примере ПИ-регулятора это соответствует случаю, когда числитель объекта A(s)
фиксирован, а знаменатель B(s) — интервальный полином. Тогда, как мы знаем (раз-
дел 7.1), P
0
(jω) изменяется в некотором прямоугольнике на комплексной плоскости (его
вершины определяются харитоновскими полиномами), поэтому при фиксированном ω
решения системы
k
1
P
1
(jω) + k
2
P
2
(jω) = −P
0
(jω)
относительно k
1
, k
2
изменяются в параллелограмме, вершины которого определяют-
ся решениями четырех харитоновских систем. Таким образом, каждая точка границы
D-разбиения размывается в параллелограмм. Точки внутри области устойчивости, не
накрываемые ни одним из этих параллелограммов, определяют значения k
1
, k
2
, гаран-
тирующие робастную стабилизацию.
Рассмотрим робастный вариант примера 4.2 из раздела 4.1. Для объекта с интер-
вальным знаменателем
G(s) =
s − 1
a
0
+ a
1
s + a
2
s
2
, 0, 8 ≤ a
0
≤ 1, 2; −0, 1 ≤ a
1
≤ 0, 1; 0, 8 ≤ a
2
≤ 1, 2,
мы ищем ПИ-регулятор
C(s) = k
1
+ k
2
/s,
гарантирующий робастную устойчивость. Характеристический полином замкнутой си-
стемы имеет вид
P (s, k) = a
0
s + a
1
s
2
+ a
2
s
3
+ k
1
s(s − 1) + k
2
(s − 1),
и уравнение границы D-разбиения P (jω) = 0 записывается следующим образом:
−k
1
ω
2
− k
2
= a
1
ω
2
,
−k
1
+ k
2
= −a
0
+ a
2
ω
2
,
(8.1)
откуда
k
1
=
a
0
− (a
1
+ a
2
)ω
2
1 + ω
2
, k
2
=
ω
2
(−a
0
− a
1
+ a
2
ω
2
)
1 + ω
2
.
Задавая значения a = (a
0
a
1
a
2
), отвечающие четырем харитоновским полиномам:
a
1
= (0, 8 − 0, 1 1, 2), a
2
= (1, 2 − 0, 1 0, 8), a
3
= (1, 2 0, 1 0, 8), a
4
= (0, 8 0, 1 1, 2),
мы при фиксированном ω получим четыре точки k
i
, i = 1, . . . , 4, лежащие в вершинах
параллелограмма. При изменении ω эти параллелограммы зачертят полосу, в которую
размоется граница D-разбиения для невозмущенного объекта a
0
= (1 0 1) (на рис. 8.2
она показана жирной линией). Особая прямая k
2
= 0 не зависит от параметров a
i
и
остается одной прямой. Таким образом, область D
rob
робастной устойчивости на плос-
кости { k
1
, k
2
} приобретает вид, показанный на рис. 8.2. Разумеется, эта область меньше,
чем в случае невозмущенного объекта (ср. с рис. 4.4).
В данном случае (и в других аналогичных) можно было поступить и иначе, восполь-
зовавшись Теоремой 53 (регулятор первого порядка стабилизирует интервальный объ-
ект тогда и только тогда, когда он стабилизирует все харитоновские объекты). Иными

206 Глава 8. Робастная стабилизация и управление
figure=c:/sher/book/figs/8rdpart.eps,height=2.5in,width=3in
Рис. 8.2: Робастное D-разбиение. Область робастной устойчивости.
словами, можно построить D-разбиение по двум параметрам k
1
, k
2
для всех харитонов-
ских объектов; тогда пересечение всех областей устойчивости даст область робастной
устойчивости. Для данного примера D-разбиение дается гиперболами, получающимися
после исключения ω
2
из уравнений (8.1):
k
2
=
(k
1
− a
0
)(k
1
+ a
1
)
a
1
+ a
2
+ k
1
и особой прямой k
2
= 0. Четыре области устойчивости (для четырех харитоновских
полиномов с коэффициентами
i
, i = 1, . . . , 4) показаны на рис. 8.3; их пересечение
определяет ту же область робастной устойчивости, что и на рис. 8.2. Идея робастного
figure=c:/sher/book/figs/8rdpart1.eps,height=2.5in,width=3in
Рис. 8.3: Робастное D-разбиение. Область робастной устойчивости как пересечение об-
ластей устойчивости четырех харитоновских объектов.
D-разбиения может быть применена и в более общем случае, когда полиномы A(s), B(s)
принадлежат семействам, отличным от интервальных, однако при этом техника по-
строения границы усложняется (граница порождается не параллелограммами, а более
сложными множествами).
Изложенные выше методы относились к стабилизации непрерывных систем. Их
можно отчасти перенести и на дискретный случай, но мы на этом не будем останавли-
ваться.
Возможны совсем другие подходы к синтезу робастных регуляторов низкого поряд-
ка, опирающиеся на численные методы. Пусть характеристический полином замкнутой
системы имеет вид
P (s, q, k), q ∈ Q.
Здесь, как и ранее, q — вектор неопределенных параметров, изменяющийся во мно-
жестве Q ⊂ R
`
, а k — коэффициенты регулятора. Будем считать, что k ∈ R
2
, т.е. мы
проектируем регулятор, зависящий от двух параметров. Тогда, для некоторого номи-
нального q
0
∈ Q можно с помощью D-разбиения найти область устойчивости в про-
странстве {k
1
, k
2
}, т.е. построить
D
0
.
= {k ∈ R
2
: P (s, q
0
, k) устойчив}.
Ясно, что множество всех робастно стабилизирующих регуляторов
D
rob
.
= {k ∈ R
2
: P (s, q, k) робастно устойчив для всех q ∈ Q}
является подмножеством D
0
: D
rob
⊂ D
0
. Генерируя точки k
i
∈ D
0
и пользуясь крите-
риями робастной устойчивости из раздела 7.1, можно проверять, будет ли k
i
∈ D
rob
.
Ясно, что можно организовать не только перебор точек из D
0
, но и построить более
эффективные методы поиска.
8.2. Робастная квадратичная стабилизация 207
8.2 Робастная квадратичная стабилизация
Рассмотрим ту же задачу, что и в разделе 4.4, но в робастном варианте. Для семей-
ства систем
˙x = A(q)x + Bu, q ∈ Q, (8.2)
мы пытаемся найти общий регулятор вида
u = Kx,
так, чтобы у замкнутых систем
˙x = A
c
(q)x, A
c
(q) = A(q) + BK, q ∈ Q,
была общая квадратичная функция Ляпунова
V (x) = x
T
P x, P > 0.
Зависимость матрицы A от параметров q может быть любой, например, это может быть
интервальное или аффинное семейство матриц (см. раздел 6.1). Как было показано в
Теореме 35, решение задачи для фиксированной A определяется решением одного ли-
нейного матричного неравенства. В случае неопределенной матрицы появляется набор
соответствующих неравенств, отвечающих всевозможным значениям параметра q.
Теорема 63 Если X — решение системы линейных матричных неравенств
XA
T
(q) + A(q)X − 2BB
T
< 0, q ∈ Q, X > 0, (8.3)
то регулятор с матрицей
K = −B
T
X
−1
робастно стабилизирует систему (8.2), а квадратичная форма
V (x) = x
T
X
−1
x
является общей функцией Ляпунова для замкнутой системы при всех q ∈ Q.
Доказательство дословно повторяет доказательство Теоремы 35; заметим лишь, что
мы несколько изменили обозначения во избежание путаницы.
Таким образом, проблема сведена к решению линейных матричных неравенств. Их
может быть конечное число, если зависимость A(q) линейна, а Q — многогранник.
Действительно, если A(q), например, аффинное семейство
A(q) = A
0
+
`
X
i=1
q
i
A
i
, q ∈ Q
.
= {q ∈ R
`
: |q|
∞
≤ 1},
то неравенства (8.3) выполняются для всех q ∈ Q тогда и только тогда, когда они
выполняются для всех вершин q
v
∈ V
.
= {q ∈ Q : |q
i
| = 1, i = 1, . . . , `} куба Q. В
частности, если A(q) — интервальное семейство матриц, то достаточно решить систему
208 Глава 8. Робастная стабилизация и управление
линейных матричных неравенств, соответствующих вершинным матрицам, т.е. тем, у
которых все элементы принимают максимальные либо минимальные значения. Для
численного решения конечных систем линейных матричных неравенств существуют
мощные вычислительные методы; их можно найти, в частности, в пакете LMI Control
Toolbox системы Matlab. Тем не менее, число неравенств может быть слишком велико:
скажем, в случае интервальной матрицы n × n число неравенств равно 2
n
2
, и уже при
n = 5 применение таких методов наталкивается на трудности. В этих случаях могут
применяться более простые итеративные методы, которые на каждом шаге имеют дело
лишь с одним случайно генерируемым неравенством. При этом общее число неравенств
может быть бесконечным.
Мы рассмотрели лишь ситуацию, когда матрица A включает неопределенность, в то
время как матрица B известна точно. Более общий случай неопределенной матрицы B
также может быть сведен к линейным матричным неравенствам.
Сопутствующие функции Matlab:
quadstab (LMIC) — нахождение общей квадратичной функции Ляпунова и радиуса
квадратичной устойчивости для аффинного семейства на основе решения системы
линейных матричных неравенств.
8.3 Робастный линейно-квадратичный регулятор
Для той же модели неопределенности, что и в предыдущем разделе,
˙x = A(q)x + Bu, q ∈ Q, x(0) = x
0
,
рассмотрим задачу о линейно-квадратичном регуляторе. Мы хотим с помощью обрат-
ной связи
u = Kx
гарантировать некоторый уровень µ квадратичного критерия оптимальности
J
.
=
∞
Z
0
h
(Rx, x) + (Su, u)
i
dt, J ≤ µ,
при всех значениях параметров q ∈ Q. Для простоты мы рассматриваем лишь случай,
когда матрицы B, R > 0, S > 0 известны точно, а неопределенность присутствует лишь
в матрице A. В разделе 5.1 были описаны различные способы решения задачи о линейно-
квадратичном регуляторе. Один из них (основанный на решении линейных матричных
неравенств (5.21)), допускает робастное обобщение.
Теорема 64 Пусть X(γ) — решение системы линейных матричных неравенств
A(q)X + XA
T
(q) + (γ − 2)BS
−1
B
T
γ
1/2
XR
1/2
γ
1/2
R
1/2
X − I
≤ 0, X > 0, q ∈ Q. (8.4)

8.4 H
∞
-ОПТИМИЗАЦИЯ 209
Решим одномерную задачу минимизации
γ
∗
= arg min
γ
ϕ(γ), ϕ(γ) = γ
−1
x
T
0
X(γ)x
0
,
где минимизация ведется по всем γ > 0, для которых решение X(γ) существует.
Тогда для обратной связи
u = −S
−1
B
T
³
X(γ
∗
)
´
−1
x
гарантируется оценка критерия оптимальности
J ≤ ϕ(γ
∗
)
для всех значений параметра q ∈ Q.
Этот результат непосредственно следует из соответствующего результата при фик-
сированной матрице A из раздела 5.1. Таким образом, здесь необходимо решать (при
фиксированном γ) системы линейных матричных неравенств (8.4) при всех q ∈ Q. Как
уже отмечалось, если A(q) — аффинное семейство, а Q — многогранник, то достаточ-
но решить конечное число систем неравенств, отвечающих вершинам Q. Если таких
вершин слишком много, можно использовать специальные итеративные методы.
8.4 Робастная стабилизация с помощью H
∞
-оптимиза-
ции
В разделе 7.3 были приведены результаты, показывающие связь между робастной
устойчивостью замкнутой системы и условиями на ограниченность некоторых переда-
точных функций в H
∞
-норме. Например, из Теоремы 56 следует, что если передаточная
функция объекта имеет вид
G(s) = G
0
(s) + W
1
(s)∆(s)W
2
(s),
то робастная устойчивость при всех k∆(s)k
∞
≤ γ имеет место при условии
kW
2
CSW
1
k
∞
<
1
γ
,
где S = (I +G
0
C)
−1
— чувствительность. Далее, пользуясь результатами об общем виде
стабилизирующих регуляторов (Теорема 29), мы заключаем, что
C = (X + V Q)(Y − UQ)
−1
,
S = (Y − UQ)(Y + UV
−1
X),
где Q — параметр Юлы (произвольная матричная функция из RH
∞
), а матрицы X, Y, U, V ∈
RH
∞
определяются условиями
G
0
= UV
−1
, UX + V Y = I.

210 Глава 8. Робастная стабилизация и управление
Таким образом, условие робастной устойчивости записывается в терминах параметра
Юлы:
kT
1
+ T
2
QT
3
k
∞
<
1
γ
,
T
1
= W
2
X(Y + UV
−1
X)W
1
, T
2
= W
2
V, T
3
= (Y + UV
−1
X)W
1
. (8.5)
В частности, задача о максимальной робастности (т.е. о нахождении максимального
уровня неопределенности γ, допускающего робастную стабилизацию), сводится к задаче
H
∞
-оптимизации
min
Q∈RH
∞
kT
1
+ T
2
QT
3
k
∞
, (8.6)
способы решения которой обсуждались в разделе 5.2. Таким образом, с принципиальной
точки зрения решение задачи о максимальной робастности выглядит так.
1. Для номинального объекта G
0
(s) находим его представление в виде G
0
= UV
−1
,
U, V ∈ RH
∞
; решаем уравнение UX + V Y = I и находим X, Y ; на их основе
вычисляем T
1
, T
2
, T
3
по формулам (8.5).
2. Решаем задачу H
∞
-оптимизации (8.6), и пусть Q ∈ RH
∞
— ее решение, а kT
1
+
T
2
QT
3
k
∞
= γ
∗
.
3. Строим регулятор
C
.
= (X + V Q)(Y − UQ)
−1
;
он является робастно стабилизирующим при всех 0 ≤ γ < γ
∗
.
Каждый из этапов может быть выполнен с помощью соответствующих процедур в
системе Мatlab.
Приведем еще несколько частных случаев, когда неопределенность задается не в
частотной, но в параметрической форме, однако возможно применение техники H
∞
-
оптимизации.
1. Комплексные параметры. Пусть передаточная функция одномерного объекта
имеет вид
G(s) =
A
0
(s) +
P
`
i=1
q
i
A
i
(s)
B
0
(s) +
P
`
i=1
q
i
B
i
(s)
, (8.7)
где A
i
, B
i
, i = 0, 1, . . . , `, — заданные полиномы, а q
i
, i = 1, . . . , `, — комплексные
параметры, изменяющиеся в шаре пространства C
`
:
`
X
i=1
|q
i
|
2
≤ γ
2
, q
i
∈ C. (8.8)
Задача заключается в построении регулятора C(s) = N(s)/D(s), который робастно
стабилизирует объект (8.7)–(8.8). Отметим, что и в числителе, и в знаменателе стоят
одни и те же неопределенные параметры q
i
; это, однако, не является ограничением
(см. рассуждения в Главе 6). Необычно здесь то, что q
i
предполагаются комплексными;
впрочем, существуют задачи, в которых такая модель возникает естественным образом.