Руководство ООО Сименс, Расширенное программирование SINUMERIK 840D
Подождите немного. Документ загружается.

Синхронные действия движения
10.4 Операции в синхронных действиях
Примеры использования:
• вычисления сложных выражений в такте IPO
• движения осей и управления шпинделем
• изменение и обработка установочных данных из синхронных действий в режиме
online, к примеру, вывод позиций и таймеров программных кулачков на PLC или
периферию ЧПУ
• вывод вспомогательных функций на PLC
• отладка дополнительных функций безопасности
• установка наложенного движения, коррекции инструмента Online и регулировки
дистанции
• выполнение операций во всех режимах работы
• управление синхронными действиями с PLC
• выполнение технологических циклов
• вывод цифровых и аналоговых сигналов
• регистрация рабочих характеристик из синхронных действий в такте интерполяции и
регистрация машинного времени регулятора положения для оценки загруженности
• возможности диагностики на интерфейсе управления
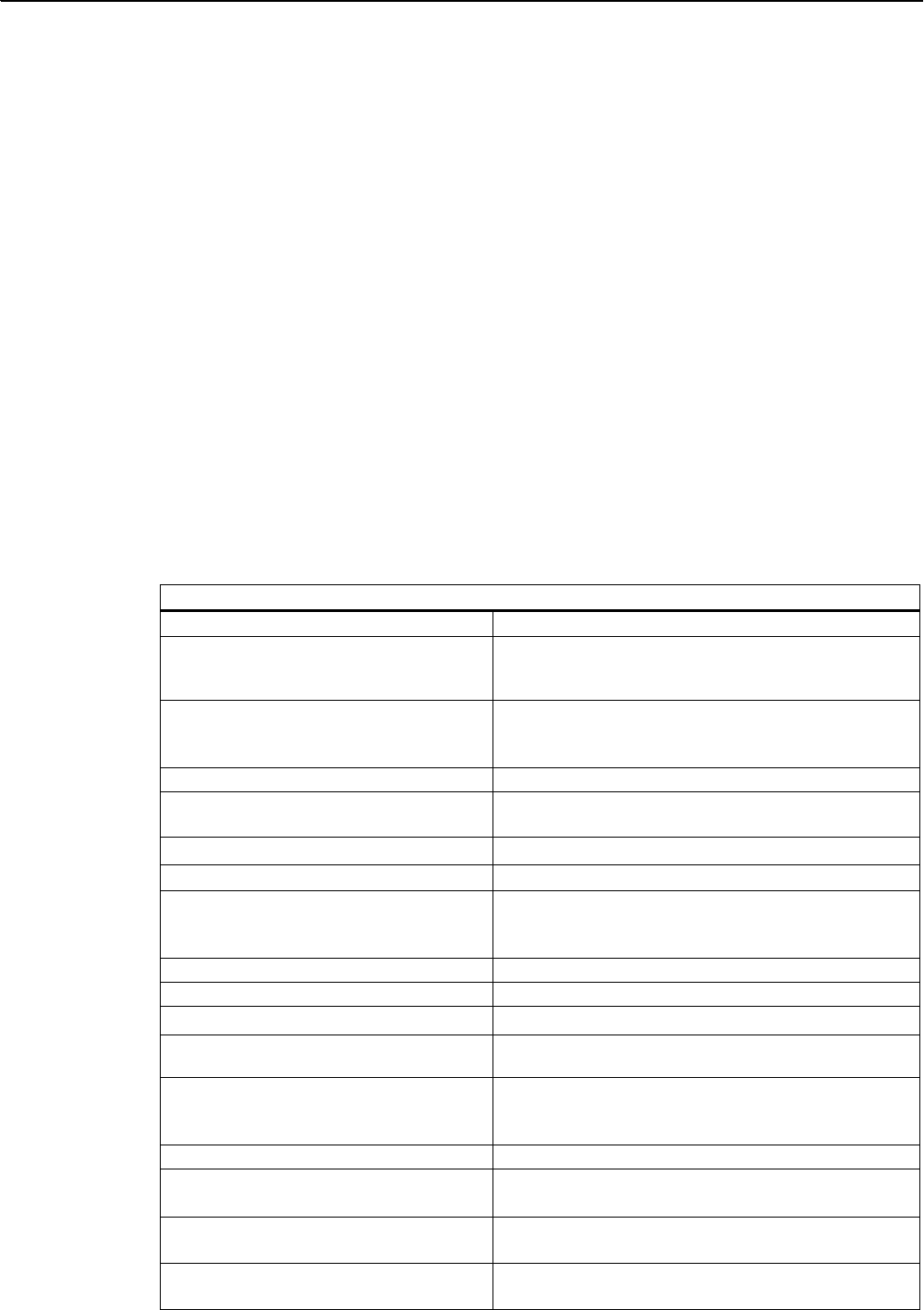
Возможности использования синхронных действий движения
Синхронное действие Описание
DO $V…=
DO $A...=
Присвоение (значения Servo)
Присвоение переменных (основные переменные
движения)
DO $AC…[n]=
DO
$AC_MARKER[n]=
DO
$AC_PARAM[n]=
Специальные основные переменные движения
Чтение или запись меток синхронного действия
Чтение или запись параметров синхронного действия
DO $R[n]= Чтение или запись R-переменных
DO $MD...=
DO $$SD...=
Чтение значения MD на момент интерполяции
Запись значения SD в главном ходе
DO
$AC_TIMER[n]=
стартовое значение Таймер
DO
$AC_F
IFO1[n] …FIFO10[n]= Переменные FIFO
DO
$AC_BLO
CKTYPE=
DO
$AC_BLO
CKTYPEINFO=
DO
$AC_SPLI
TBLOCK=
Интерпретация актуального кадра (основные пере-
менные движения)
DO M-, S и H, к примеру, M07 Вывод вспомогательных функций M, S и H
DO RDISABLE Установить блокировку загрузки
DO STOPREOF Отменить остановку предварительной обработки
DO DELDTG Быстрое стирание остатка пути без остановки пред-
варительной обработки
FTCDEF(полин., LL, UL , коэфф.)
DO SYNFCT(полин., Output, Input)
Определение полиномов
Активация синхронных функций: адаптивное управ-
ление
DO FTOC Коррекция инструмента Online
DO G70/G71/G700/G710 Определить систему единиц для задач позиционирования
Дюймовое или метрическое указание размеров
DO POS[ось]= / DO MOV[ось]= DO
SPOS[шпиндель]=
Запустить/позиционировать/остановить командные оси
Запустить/позиционировать/остановить шпиндели
DO MOV[ось]=значение Запустить/остановить бесконечные движения ко-
мандной оси
Расширенное программирование
10-24 Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
Не для продажи
со станком
Синхронные действия движения
10.4 Операции в синхронных действиях
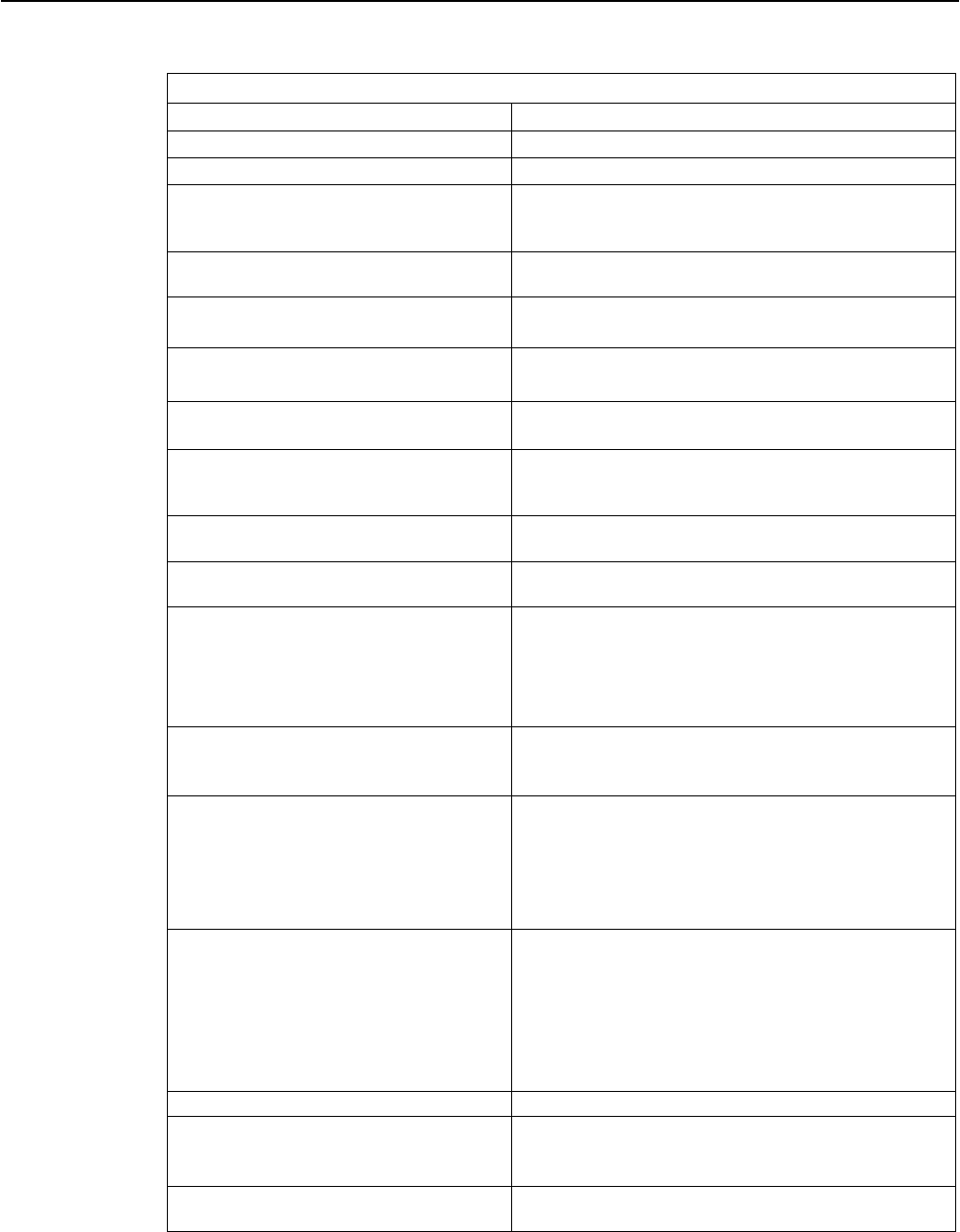
Возможности использования синхронных действий движения
DO POS[ось]= FA [ось]= Осевая подача FA
DO
$A_WORAREA_PLUS_E
NABLE]= Ограничение рабочего поля
ID=1 ... DO POS[ось]= FA [ось]=
ID=2 ... DO POS[ось]=
$AA_IM[ось]
FA [ось]=
Позиционирование из синхронных действий
DO PRESETON(ось, значение) Установка фактического значения (Preset из синхрон-
ных действий)
ID=1 EVERY
$A_IN[
1]=1 DO M3 S….
ID=2 EVERY
$A_IN[2]=1
DO SPOS=
Запустить/позиционировать/остановить шпиндели
DO TRAILON(FA, LA, коэфф. связи)
DO LEADON(FA, LA, NRCTAB, OVW)
Включить буксировку
Включить соединение по главному значению
DO MEAWA(ось)=
DO MEAC(ось)=
Включить осевое измерение
Включить непрерывное измерение
DO [поле n, m]=SET(значение, значение, ...)
DO [поле n, m]=REP(значение, значение, ...)
Инициализация переменных поля со списками значений
Инициализация переменных поля с одинаковыми
значениями
DO SETM(номер метки)
DO CLEARM(номер метки)
Установка меток ожидания
Удаление меток ожидания
DO SETAL(номер ошибки) Установка ошибки циклов (дополнительная функция
безопасности)
DO FXS[ось]=
DO FXST[ось]=
DO FXSW[ось]=
DO FOCON[ось]=
DO FOCOF[ось]=
Выбрать наезд на жесткий упор
Изменить зажимной момент
Изменить окно контроля
Акт. движение с ограниченным моментом/силой (модально)
Деакт. FOC (синхронное действие активно отн. кадра
)
ID=2 EVEREY
$AC_BLOCKT
YPE==0 DO
$R1 =
$AC_T
ANEB
Угол между касательной к траектории в конечной точке
актуального кадра и касательной к траектории в стартовой
точке запрограммированного следующего кадра
DO
$AA_OVR=
DO
$AC_OVR=
DO
$AA_PLC_
OVR
DO
$AC_PLC_
OVR
DO
$AA_TOTAL_OVR
DO
$AC_TOTAL_OVR
Осевая процентовка
Процентовка траектории
Заданная с PLC осевая процентовка
Заданная с PLC процентовка траектории
Результирующая осевая процентовка
Результирующая процентовка траектории
$AN_IPO_ACT_LOAD=
$AN_IPO_MAX_LOAD=
$AN_IPO_MIN_LOAD=
$AN_IPO_LOAD_PERCENT=
$AN_SYNC_A
C
T_LOAD=
$AN_SYNC_MAX_LOAD=
$AN_SYNC_TO_IPO=
Актуальное машинное время IPO
Макс. машинное время IPO
Мин. машинное время IPO
Актуальное машинное время IPO по отношению к такту IPO
Актуальное маш. время для синхр. действия по всем каналам
Макс. маш. время для синхронного действия по всем канала
м
Процентная доля всего синхронного действия
DO TECCYCLE Выполнить технологический цикл
DO LOCK(n, n, ...)
DO UNLOCK(n, n, ...)
DO RESET(n, n, ...)
Блокировать
Разрешить
RESET технологического цикла
CANCEL(n, n, ...)
Удалить модальные синхронные действия с обозна-
чением ID(S) в программе обработки детали
Расширенное программирование
Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
10-25
Не для продажи
со станком
Синхронные действия движения
10.4 Операции в синхронных действиях
10.4.2 Вывод вспомогательных функций
Функция
Вывод вспомогательных функций выполняется в синхронных действиях непосредст-
венно в момент времени вывода действия. Определенный через машинные данные
момент времени вывода для вспомогательных функций не действует.
Момент времени имеет место при выполнении условия.
Пример:
Включение СОЖ в определенной позиции оси:
WHEN $AA_IM[X]>=15 DO M07 POS[X]=20 FA[X]=250
Разрешенные кодовые слова в покадровых синхронных действиях
(без модального ID)
Вспомогательные функции могут быть запрограммированы только с кодовыми сло-
вами WHEN или EVERY.
Указание
Следующие вспомогательные функции запрещены в синхронных действиях:
• M0, M1, M2, M17, M30: останов/конец программы (M2, M17, M30 возможны для
технологических циклов)
• M70: функция шпинделя
• M6 или установленные через машинные данные функции М для смены инструмента
• M40, M41, M42, M43, M44, M45: переключение редуктора
Пример
WHEN
$AA_IW[Q1]>5
DO
M172
H510
;если фактическое значение оси
Q1
превышает
5
мм
,
;то вывести вспомогательные функции
M172
и
H510
на
PLC
10.4.3 Установка блокировки загрузки (RDISABLE)
Функция
При RDISABLE в случае выполненного условия дальнейшая обработка кадра в главной
программе останавливается. Запрограммированные синхронные действия движения
продолжают обрабатываться, последующие кадры продолжают подготавливаться.
Расширенное программирование
10-26 Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
Не для продажи
со станком
Синхронные действия движения
10.4 Операции в синхронных действиях
В режиме управления траекторией в начале кадра с RDISABLE в синхронных действиях
всегда выполняется точный останов, независимо от того, активна ли команда RDISABLE
или нет.
Пример
Независимо от внешних входов, запустить программу в такте интерполяции.
...
WHENEVER
$A_INA[2]<7000
DO
RDISABLE
;если на входе 2 напряжение становится ниже
7 В,
;то остановить продолжение программы
;
(1000=
1В).
N10
G1
X10
;если условие выполнено, то
;блокировка загрузки действует в конце N10
N20
G1
X10
Y20
...
10.4.4 Отмена остановки предварительной обработки (STOPREOF)
Функция
В случае явно запрограммированной остановки предварительной обработки STOPRE
или в случае не явно активированной через активное синхронное действие остановки
предварительной обработки, STOPREOF, как только условие выполнено, отменяет ос-
тановку предварительной обработки после следующего кадра обработки.
Указание
STOPREOF должна программироваться с кодовым словом WHEN и покадрово (без но-
мера ID).
Пример
Быстрое ветвление программы на конце кадра.
WHEN
$AC_DTEB<5
DO
STOPREOF
;если дистанция до конца кадра становится
меньше 5 мм,
;отменить остановку предварительной обработки.
G01
X100
;после выполнения линейной интерполяции,
;остановка предварительной обработки отменяет-
ся.
IF
$A_INA[7]>500
GOTOF
MARKE1=X100
;если на входе 7 напряжение становится выше 5 В,
;перейти на метку 1.
Расширенное программирование
Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
10-27
Не для продажи
со станком
Синхронные действия движения
10.4 Операции в синхронных действиях
10.4.5 Стирание остатка пути (DELDTG)
Функ-
ция
В зависимости от условия, стирание остатка пути может быть запущено для
траектории и для указанных осей.
Имеется:
• быстрое, подготовленное стирание остатка пути
• стирание остатка пути без подготовки
Подготовленное стирание остатка пути с DELDTG позволяет очень быстро реагировать
на запускающее событие и поэтому используется в критических по времени приложени-
ях, к примеру, когда
• время между стиранием остатка пути и запуском следующего кадра должно быть
очень коротким.
• условие для стирания остатка пути будет выполнено с очень высокой вероятностью.
Указание
Указанное после DELDTG в скобках обозначение оси действительно только
для позиционирующей оси.
Программиро-
вание
Стирание остатка пути для траектории
DO DELDTG
или
осевое стирание остатка пути
DO DELDTG(ось1, ось2, ...)
Пример быстрого стирания остатка пути траектории
WHEN
$A_IN[1]==1
DO
DELDTG
N100
G01
X100
Y100
F1000
;если вход установлен, то движение
;отменяется
N110
G01
X…
IF
$AA_DELT>50…
Расширенное программирование
10-28 Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
Не для продажи
со станком
Синхронные действия движения
10.4 Операции в синхронных действиях
Пример быстрого осевого стирания остатка пути
Отмена движения позиционирования:
ID=1
WHEN
$A_IN[1]==1
DO
MOV[V]=3
FA[V]=700
;запустить ось
WHEN
$A_IN[2]==1
DO
DELDTG(V)
;стирание остатка пути, останов оси выполняется с
MOV=0
В зависимости от входного напряжения стереть остаточный путь:
WHEN
$A_INA[5]>8000
DO
DELDTG(X1)
;как только на входе 5 напряжение становится выше 8В,
стереть остаточный путь оси
X1.
Движение по траектории продолжается.
POS[X1]=100
FA[X1]=10
G1
Z100
F1000
Описание
В конце кадра движения, в котором было запущено подготовленное стирание остатка
пути, не явно активируется остановка предварительной обработки.
Поэтому режим управления траекторией или движения позиционирующих осей в конце
кадра с быстрым стиранием остатка пути прерываются или останавливаются.
Указание
Подготовленное стирание остатка пути
• не может использоваться при активной коррекции радиуса инструмента.
• может быть запрограммировано только в активных покадрово синхронных
действиях (без номера ID).
Расширенное программирование
Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
10-29
Не для продажи
со станком

Синхронные действия движения
10.4 Операции в синхронных действиях
10.4.6 Определение полиномов (FCTDEF)
Функция
С помощью FCTDEF можно определять полиномы 3-его порядка в форме
y=a
0
+a
1
x+a
2
x
2
+a
3
x
3
.
Эти полиномы используются коррекцией инструмента Online FTOC
и функцией обработки SYNFCT.
Программиро-
вание
FCTDEF(Номер полинома,LLIMIT,ULIMIT,a
0
,a
1
,a
2
,a
3
)
Параметры
Номер полинома
Номер полинома 3-его порядка
LLIMIT
Нижняя граница для функционального значения
ULIMIT
Верхняя граница для функционального значения
a
0
,
a
1
,
a
2
,
a
3
Коэффициенты полиномов
Обращение к этим значениям возможно и через системные переменные
$AC_FCTLL[n]
Нижняя граница для функционального значения
$AC_FCTUL[n]
Верхняя граница для функционального значения
$AC_FCT0[n]
a
0
$AC_FCT1[n]
a
1
$AC_FCT2[n]
a
2
$AC_FCT3[n]
a
3
Указание
Запись системных переменных
• Системные переменные могут записываться из программы обработки детали или из
синхронного действия. При записи из программы обработки детали через програм-
мирование STOPRE необходимо обеспечить запись синхронно с кадром.
• Системные переменные $AC_FCTLL[n], $AC_FCTUL[n], $AC_FCT0[n] до
$AC_FCTn[n] могут изменяться из синхронных действий
При записи из синхронных действий коэффициенты полиномов и
границы функциональных значений активируются сразу же.
Расширенное программирование
10-30 Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
Не для продажи
со станком
Синхронные действия движения
10.4 Операции в синхронных действиях
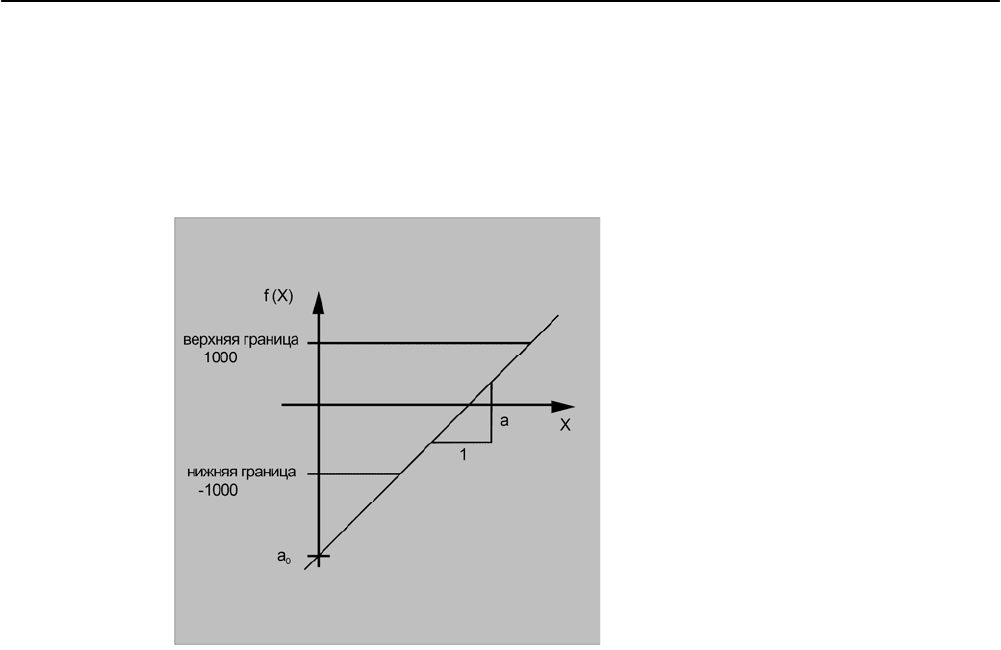
Пример полинома для участка прямой
С верхней границей 1000, нижней границей -1000, сегментом ординаты a
0
=$AA_IM[X]
и
подъемом прямой 1 определение полинома выглядит следующим образом:
FCTDEF(1, -1000,1000,$AA_IM[X],1)
I
;
2EHUJUHQ]H
D
;
8QWHUJUHQ]H
D
Расширенное программирование
Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
10-31
Не для продажи
со станком
Синхронные действия движения
10.4 Операции в синхронных действиях
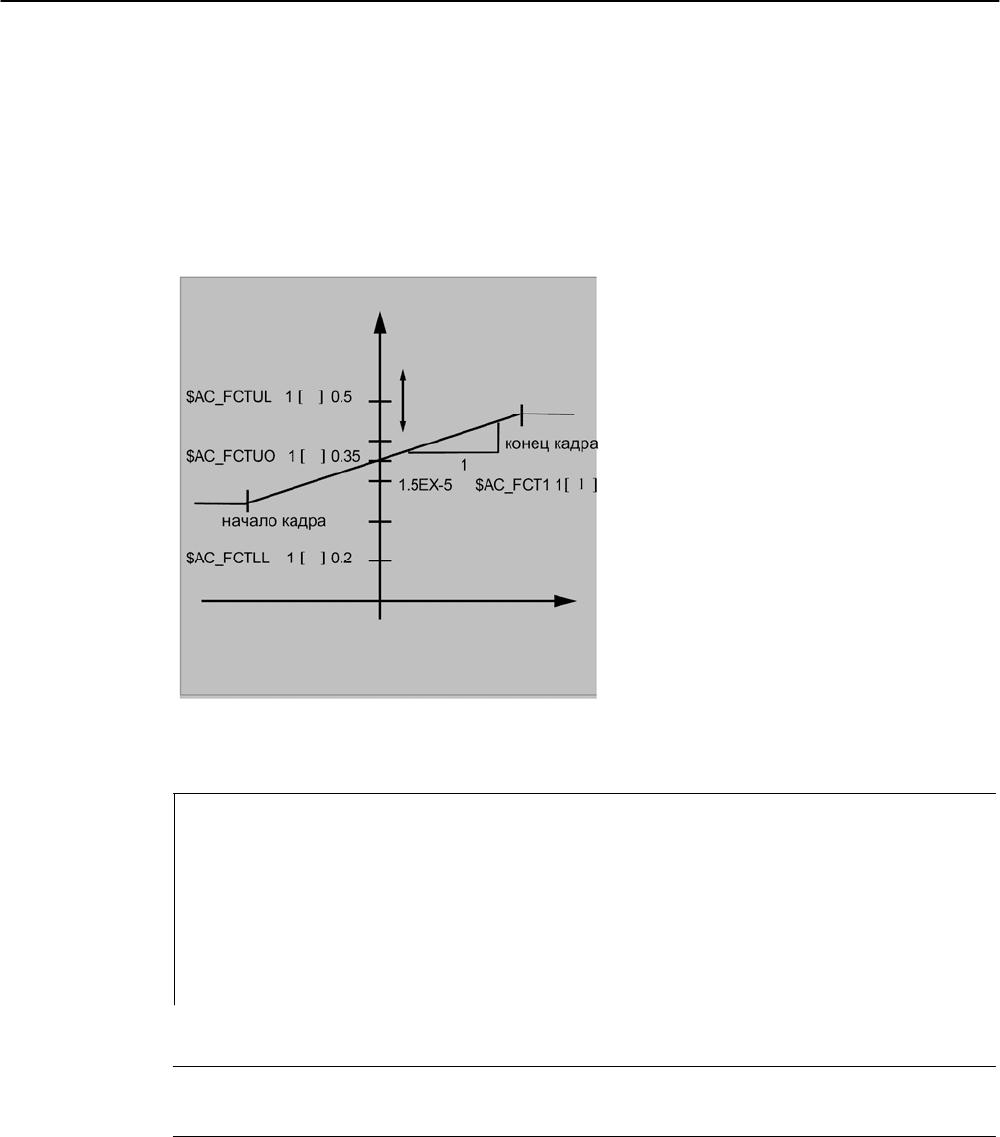
Пример управления мощностью лазера
Одним из возможных случаев использования определения полинома является управ-
ление мощностью лазера. Управление мощностью лазера это:
управление аналоговым выходом в зависимости, к примеру, от скорости движения по
траектории.
$&B)&78/
>
@
$&B)&782
>
@
6DW]HQGH
(;
$&B)&7
>
6DW]DQIDQJ
$&B)&7//
>
@
$AC_FCTLL[1]=0.2
;определение коэффициентов полинома
$AC_FCTUL[1]=0.5
$AC_FCT0[1]=0.35
$AC_FCT1[1]=1.5EX-5
STOPRE
ID=1
DO
$AC_FCTUL[1]=$A_INA[2]*0.1
+0.35
;изменение верхней границы online.
ID=2
DO
SYNFCT(1,$A_OUTA[1],$AC_VACTW)
;в зависимости от скорости движения по траектории (зафиксирована в
$AC_VACTW),
;
управление мощностью лазера осуществляется через аналоговый выход 1
Указание
Использование определенного выше полинома осуществляется с SYNFCT.
Расширенное программирование
10-32 Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
Не для продажи
со станком

Синхронные действия движения
10.4 Операции в синхронных действиях
10.4.7 Синхронная функция (SYNFCT)
Функция
SYNFCT вычисляет выходное значение полинома 3-его порядка, оцененное посредст-
вом входных переменных. Результат стоит в выходных переменных и ограничивается
вверх и вниз.
Функция обработки используется
• в адаптивном управлении (Adaptive Control),
• при управлении мощностью лазера,
• при подключении позиции.
Программирование
SYNFCT(Номер полинома, выход основных переменных движения, вход
основных переменных движения)
Параметры
В качестве выходных переменных могут выбираться переменные, которые входят в
процесс обработки
• с аддитивным влиянием
• с мультипликативным влиянием
• как смещение позиции
• напрямую.
DO
SYNFCT
Активация функции обработки
Номер полинома
Определенный с FCTDEF полином
(см. раздел "Определение полино-
ма")
Выход основных переменных движения
Запись основных переменных движения
Вход основных переменных движения
Чтение основных переменных движения
Расширенное программирование
Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
10-33
Не для продажи
со станком