Руководство ООО Сименс, Расширенное программирование SINUMERIK 840D
Подождите немного. Документ загружается.


Синхронные действия движения
10.4 Операции в синхронных действиях
10.4.29 Определение актуальной процентовки
Функция
Актуальная процентовка
(составляющая ЧПУ) может считываться и записываться в синхронных действиях по-
средством системных переменных:
$AA_OVR осевая процентовка
$AC_OVR процентовка траектории
Заданная с PLC процентовка подготавливается для чтения в синхронных действиях в
системных переменных:
$AA_PLC_OVR осевая процентовка
$AC_PLC_OVR процентовка траектории.
Результирующая процентовка
подготавливается для чтения в синхронных действиях в системных переменных:
$AA_TOTAL_OVR осевая процентовка
$AC_TOTAL_OVR процентовка траектории.
Результирующая процентовка вычисляется как:
$AA_OVR * $AA_PLC_OVR или
$AC_OVR * $AC_PLC_OVR
Расширенное программирование
10-64 Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
Не для продажи
со станком
Синхронные действия движения
10.4 Операции в синхронных действиях
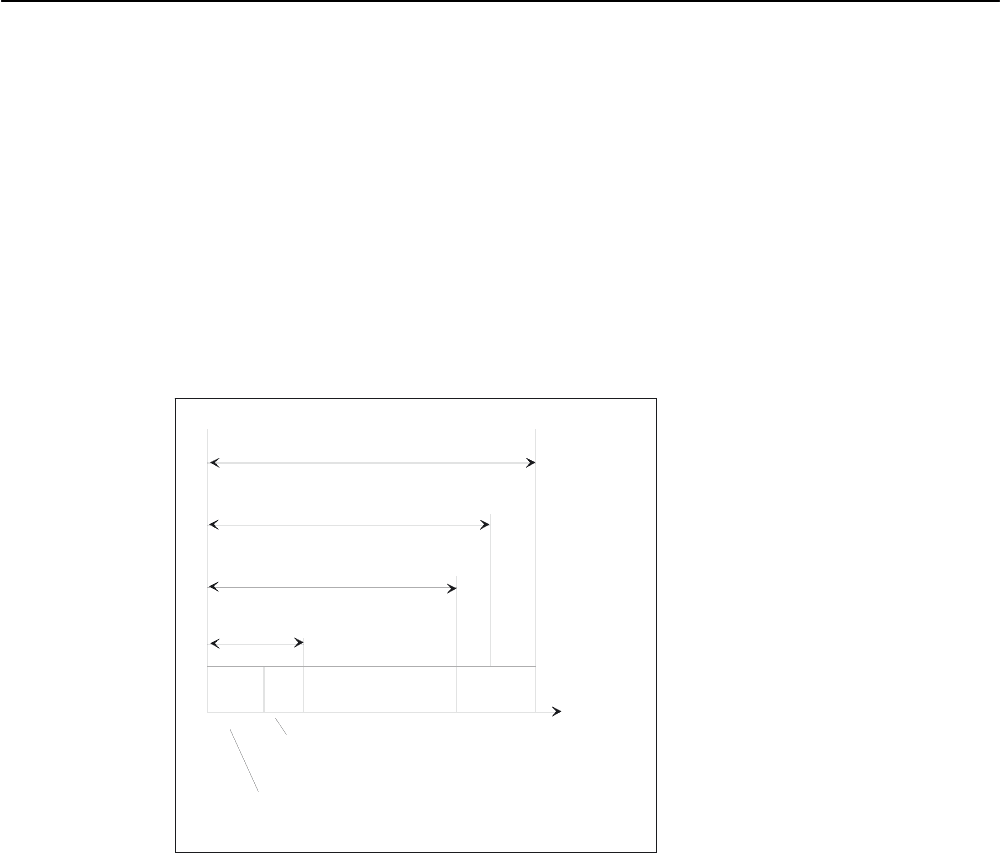
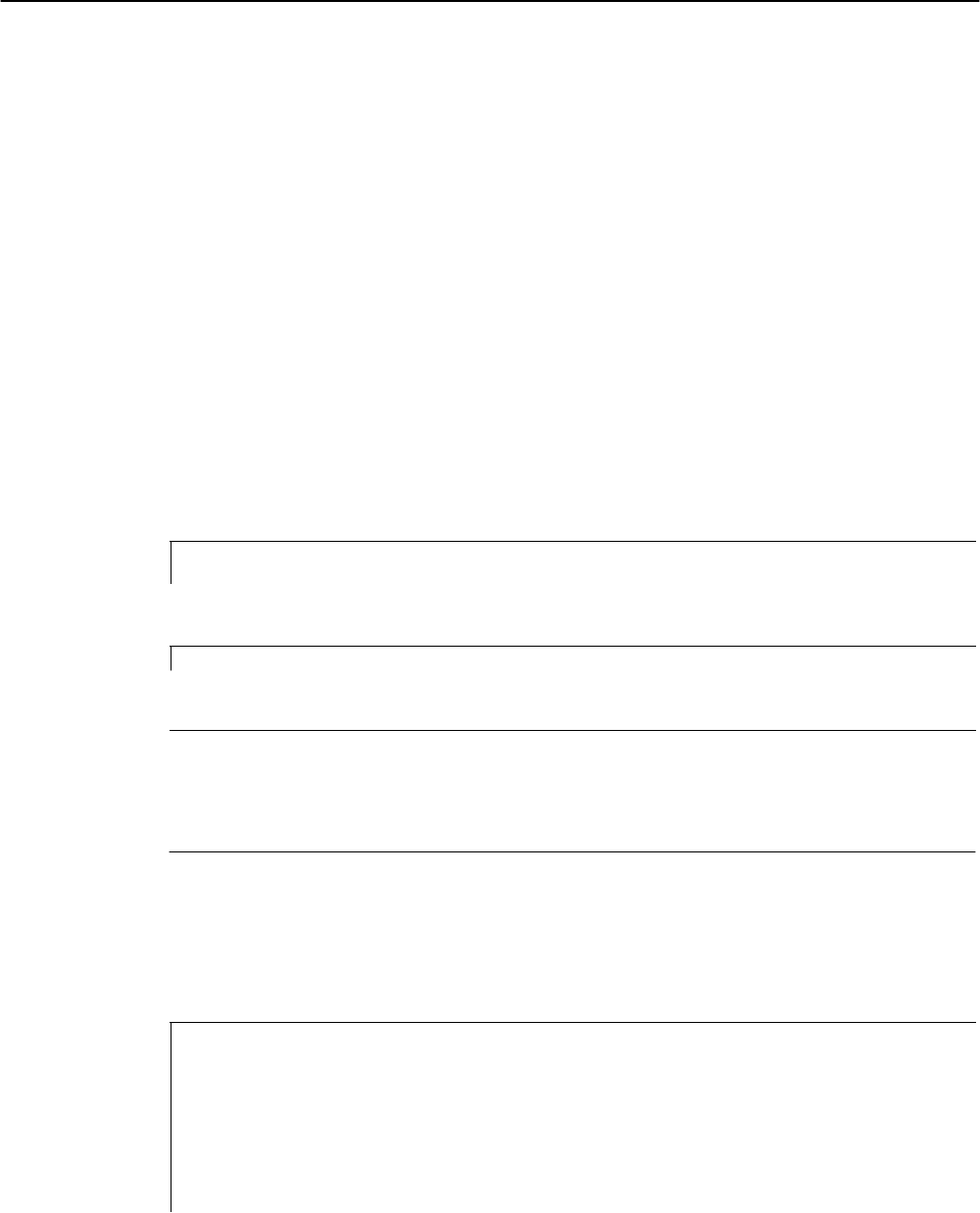
10.4.30 Анализ загруженности через требуемое время синхронных действий
Функция
В одном такте интерполяции должна выполняться как интерпретация синхронных дейст-
вий, так и вычисление движений и т.п. с ЧПУ. С помощью представленных ниже систем-
ных переменных синхронные действия могут получать информацию об актуальных долях
времени синхронных действий в такте интерполяции и о машинном времени регулятора
положения.
Такт IPO
$MN_IPO_MAX_LOAD
Предельное значение для загруженности такта IPO
$AN_IPO_ACT_LOAD
Акт. машинное время IPO, вкл. синхронизацию каналов
$AN_SYNC_ACT_LOAD
Акт. машинное время для синхронных
действий по всем каналам
$AC_SYNC_ACT_LOAD
t
(канал 2)
Машинное время для синхронных действий канала 2
$AC_SYNC_ACT_LOAD
(канал 1)
Машинное время для синхронных действий канала 1
Расширенное программирование
Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
10-65
Не для продажи
со станком
Синхронные действия движения
10.4 Операции в синхронных действиях
Параметры
Переменные имеют действительные значения, только если машинные данные
$MN_IPO_MAX_LOAD больше, чем 0. В ином случае переменные всегда указывают как
для систем SINUMERIK powerline, так и для solution line машинное время нетто, в кото-
ром созданные через HMI прерывания более не учитываются.
Машинное время нетто получается из:
• времени синхронного действия,
• времени регулировки положения и
• оставшегося машинного времени IPO без обусловленных HMI прерываний
Системные переменные всегда содержат значения
предшествующего
такта
IPO
$AN_IPO_ACT_LOAD
Актуальное машинное время
IPO
(вкл.
синхронные действия всех каналов)
$AN_IPO_MAX_LOAD
Макс. машинное время
IPO
(вкл.
синхронные действия всех каналов)
$AN_IPO_MIN_LOAD
Мин. машинное время
IPO
(вкл.
синхронные действия всех каналов)
$AN_IPO_LOAD_PERCENT
Актуальное машинное время
IPO по
отношению к такту
IPO
(%).
$AN_SYNC_ACT_LOAD
Актуальное машинное время для
синхронных действий по всем каналам
$AN_SYNC_MAX_LOAD
Макс. машинное время для
синхронных действий по всем каналам
$AN_SYNC_TO_IPO
Процентная доля всех
синхронных действий в общем
машинном времени IPO (по всем каналам)
$AC_SYNC_ACT_LOAD
Актуальное машинное время для
синхронных действий в канале
$AC_SYNC_MAX_LOAD
Макс. машинное время для
синхронных действий в канале
$AC_SYNC_AVERAGE_LOAD
Среднее машинное время для
синхронных действий в канале
$AN_SERVO_ACT_LOAD
Актуальное машинное время регулятора
положения
$AN_SERVO_MAX_LOAD
Макс. машинное время регулятора
положения
$AN_SERVO_MIN_LOAD
Мин. машинное время регулятора
положения
Переменная для сообщения о перегрузке:
Через машинные данные $MN_IPO_MAX_LOAD устанавливается, от какого
машинного времени нетто IPO (в % от такта IPO) системная переменная
$AN_IPO_LOAD_LIMIT должна быть установлена на TRUE. Если актуальная на-
грузка снова падает ниже этой границы, то переменная снова устанавливается на
FALSE. Если машинные данные 0, то вся функция диагностики деактивирована.
Через анализ $AN_IPO_LOAD_LIMIT пользователь может определить собственную
стратегию для недопущения переполнения уровней.
Расширенное программирование
10-66 Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
Не для продажи
со станком

Синхронные действия движения
10.5 Технологические циклы
10.5
Технологические циклы
Функция
В качестве операций в синхронных действиях могут вызываться и программы, которые,
однако, могут состоять только из функций, которые разрешены в качестве операций в
синхронных действиях
Построенные таким образом программы называются технологическими циклами.
Технологические циклы сохраняются на СЧПУ как подпрограммы.
В одном канале возможна параллельная обработка нескольких технологических
циклов или операций.
Программиро-
вание
• Конец программы программируется с M02/M17/M30/RET.
• На одном программном уровне все указанные в ICYCOF операции могут
быть обработаны в одном такте без циклов ожидания.
• Возможен последовательный опрос до 8 технологических циклов на синхронное
действие.
• Технологические циклы возможны и в покадровых синхронных действиях.
• Могут быть запрограммированы как контрольные структуры IF, так и операторы
перехода GOTO, GOTOF и GOTOB.
Кадры с операторами DEF и DEFINE в технологических циклах
• операторы DEF и DEFINE в технологических циклах игнорируются
• они, как и прежде, приводят в случае ошибочного или неполного синтаксиса к
сигнализации ошибки
• полностью учитываются при присвоении значений как цикл программы обработки
детали
Передача параметров
Передача параметров в технологический цикл возможна. Учитываются как простые типы
данных, которые передаются как формальные параметры "вызов по значению", так и ус-
тановки по умолчанию, которые активируются при вызове технологических циклов. Это:
• Запрограммированные значения по умолчанию, если параметр передачи не
запрограммирован.
• Присвоить значениям по умолчанию значения инициализации.
• Передать не инициализированные актуальные параметры со значением по
умолчанию.
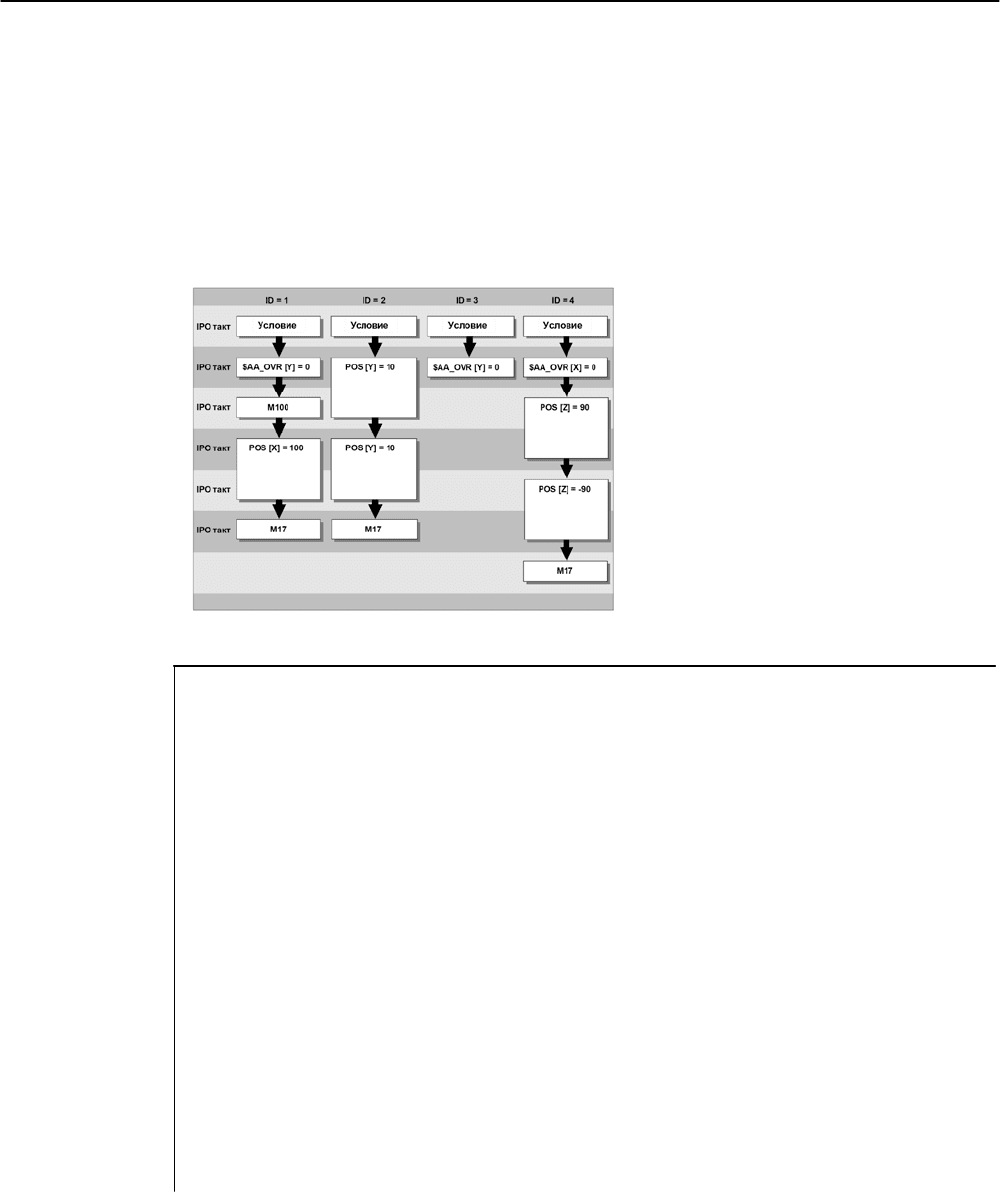
Процесс
Технологические циклы запускаются сразу же после выполнения их условий. Каждая
строка технологического цикла выполняется в отдельном такте IPO. Позиционирующим
осям для выполнения необходимо несколько тактов IPO. Другие функции выполняются
за один такт. В технологическом цикле кадры обрабатываются последовательно.
Расширенное программирование
Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
10-67
Не для продажи
со станком
Синхронные действия движения
10.5 Технологические циклы
Если в одном такте интерполяции вызываются взаимоисключающие операции,
то активируется та операция, которая вызывается синхронным действием с более высо-
ким номером ID.
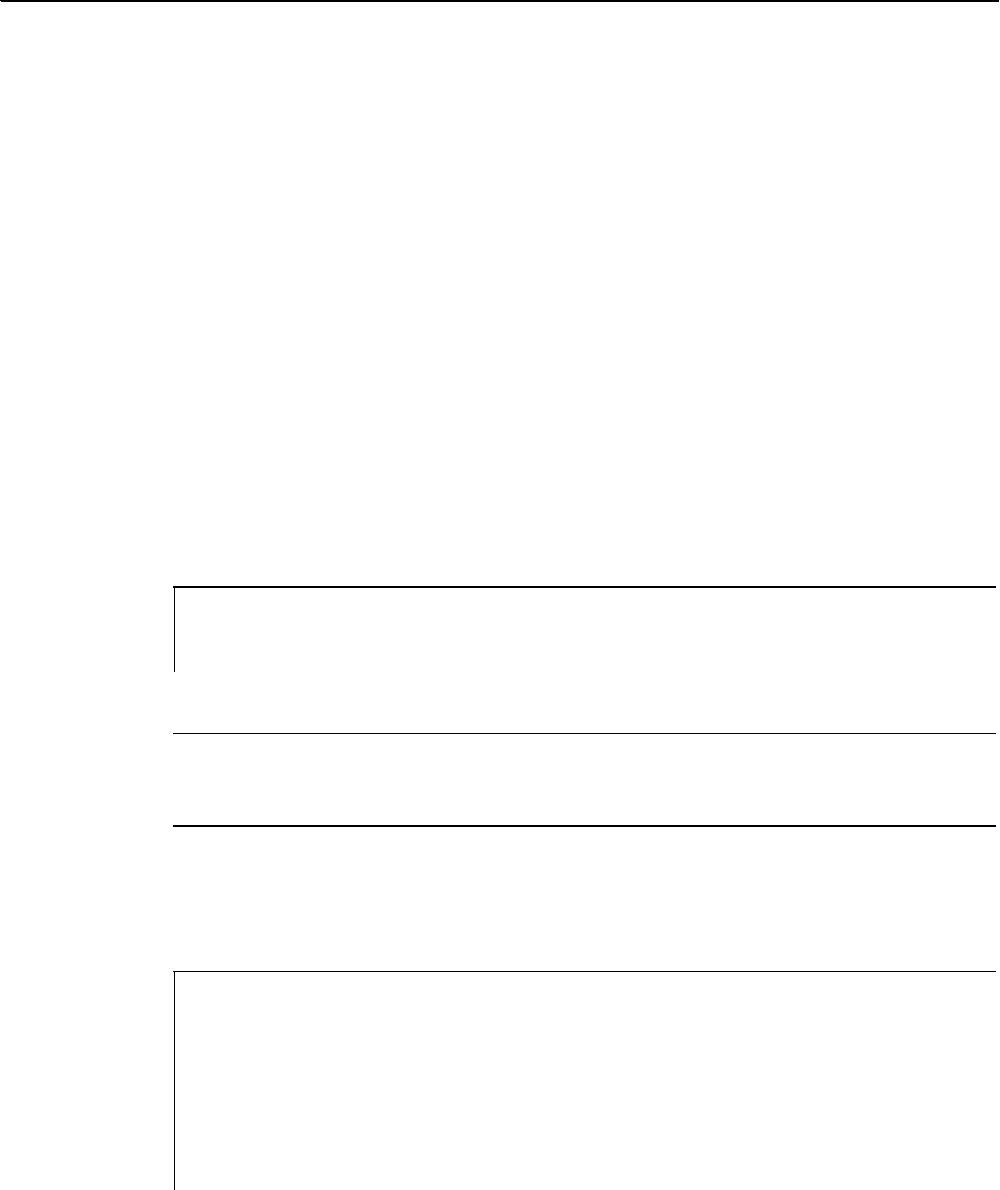
Пример
Через установку цифровых входов запускаются осевые программы.
,'
,'
,'
,'
,32
7DNW
%HGLQJXQJ
%HGLQJXQJ
%HGLQJXQJ
%HGLQJXQJ
,32
7DNW
,32
7DNW
,32
7DNW
,32
7DNW
,32
7DNW
$$B295
><@
0
326
>;@
0
326
><@
326
><@
0
$$B295
><@
$$B295
>;@
326
>=@
326
>=@
0
Главная программа:
Если
ID=1
EVERY
$A_IN[1]==1
DO
ACHSE_X
;вход 1
стоит на 1,
запустить осевую про-
грамму
X ID=2
EVERY
$A_IN[2]==1
DO
ACHSE_Y
;вход 2
стоит на 1,
запустить осевую
программу
Y
ID=3
EVERY
$A_IN[3]==1
DO
$AA_OVR[Y]=0
;вход
3
стоит на
1,
установить процентовку
;оси
Y
на
0
ID=4
EVERY
$A_IN[4]==1
DO
ACHSE_Z
;вход 4
стоит на 1,
запустить осевую
программу
Z
M30
Технологический цикл
ACHSE_X:
$AA_OVR[Y]=0
M100
POS[X]=100
FA[X]=300
M17
Технологический цикл
ACHSE_Y:
POS[Y]=10
FA[Y]=200
POS[Y]=-10
M17
Технологический цикл
ACHSE_Z:
$AA_OVR[X]=0
POS[Z]=90
FA[Z]=250
POS[Z]=-90
M17
Расширенное программирование
10-68 Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
Не для продажи
со станком
Синхронные действия движения
10.5 Технологические циклы
Примеры различных программных последовательностей в технологическом цикле
PROC
CYCLE
N10
DEF
REAL
"значение"=12.3
N15
DEFINE
ABC
AS
G01
Оба кадра пропускаются без создания переменной или макроса
PROC
CYCLE
N10
DEF
REAL
N15
DEFINE
ABC
G01
Оба кадра снова приводят к ошибке ЧПУ из-за неправильного синтаксиса.
PROC
CYCLE
N10
DEF
AXIS
"ось1"=XX2
Если ось XX2 неизвестна, то выводится ошибка 12080. В ином случае кадр пропуска-
ется без ошибки и без создания переменной.
PROC
CYCLE
N10
DEF
AXIS
"ось1"
N15
G01
X100
F1000
N20
DEF
REAL"значение1"
Кадр N20 всегда приводит к ошибке 14500, т.к. оператор DEF после первой
строки программы запрещен.
Расширенное программирование
Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
10-69
Не для продажи
со станком
Синхронные действия движения
10.5 Технологические циклы
10.5.1 Контекстная переменная
($P_T
ECCYCLE)
Функция
С помощью переменной
$P_TECCY
CLE программы могут быть разделены на про-
граммы синхронных действий и программы предварительной обработки. Благодаря
этому существует возможность альтернативного выполнения кадров с правильным
синтаксисом или программных последовательностей и как цикла программы обра-
ботки детали.
Интерпретация контекстной переменной
Системная переменная
$P_T
ECCYCLE позволяет управлять интерпретациями частей
программы со специфическим контекстом в технологических циклах, если
IF
$P_TECCYCLE==TRUE
Программная последовательность для техно-
логического цикла в синхронном действии
иначе
ELSE
Программная последовательность для цикла
программы обработки детали
Указание
Кадр с ошибочным или запрещенным синтаксисом программы, а также неизвестные
присвоения значений, приводят и в цикле программы обработки детали к сигнализации
ошибки.
Пример программной последовательности с опросом
$P_TECCYCL
E
в технологическом
цикле
PROC
CYCLE
N10
DEF
REAL
"значение1"
;пропускается в технологическом цикле
N15
G01
X100
F1000
N20
IF
$P_TECCYCLE==TRUE
N25
"Программная последовательность для технологического цикла
(без переменной "значение1)"
N30
ELSE
N35
"Программная последовательность для цикла программы обработки детали
(имеется пере-
менная
"значение
1")"
ENDIF
Расширенное программирование
10-70 Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
Не для продажи
со станком

Синхронные действия движения
10.5 Технологические циклы
10.5.2 Параметры, передаваемые по значению (вызов по значению)
Функция
Технологические циклы могут быть определены с параметрами, передаваемыми по зна-
чению. В качестве параметров здесь возможны простые типы данных, как то, INT, REAL,
CHAR, STRING, AXIS и BOOL.
Указание
Формальные параметры, передаваемые по значению, не могут быть полями.
Актуальные параметры могут состоять и из параметров по умолчанию,
см. главу "Инициализация параметров по умолчанию".
Программирование
ID=1
WHEN
$AA_IW[X]>50
DO
TEC(IVAL,
RVAL,
,
SVAL,
AVAL)
;для не инициализированных актуальных параметров передается значение по умолчанию.
ID=1
WHE
$AA_IW[X]>50
DO
TEC(IVAL,
RVAL,
,
SYG_SS[0],
AVAL)
10.5.3 Инициализация параметров по умолчанию
Функция
Параметрам по умолчанию в операторе PROC значение инициализации.
Программиро-
вание
Присвоение параметров по умолчанию в технологическом цикле:
PROC
TEC
(INT
IVAL=1,
REAL
RVAL=1.0,
CHAR
CVAL='A',
STRING[10]
SVAL="ABC",
AXIS
AVAL=X,
BOOL
BVAL=TRUE)
Если актуальный параметр состоит из параметра по умолчанию, то значение инициали-
зации передается из оператора PROC. Это относится как к программе обработки дета-
ли, так и к синхронным действиям.
Пример
TEC
(IVAL,
RVAL,
,
SVAL,
AVAL)
;для
CVAL
и
BVAL
действует значение инициализа-
ции
Расширенное программирование
Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
10-71
Не для продажи
со станком
Синхронные действия движения
10.5 Технологические циклы
10.5.4 Управление обработкой технологических циклов (ICYCOF, ICYCON)
Функция
Для управления обработкой технологических циклов по времени служат языковые ко-
манды ICYCOF и ICYCON.
С ICYCOF все кадры одного технологического цикла выполняются только в одном такте
интерполяции. Все операции, для которых необходимо несколько тактов, приводят в слу-
чае ICYCOF к параллельным процессам обработки.
Использование
При ICYCON движения командных осей могут привести к задержке выполнения техно-
логического цикла. Если это нежелательно, то с помощью ICYCOF все операции могут
быть выполнены без времени ожидания в одном такте интерполяции.
Программирование
Для циклической обработки технологических циклов действует:
ICYCON
Каждый кадр технологического цикла после
ICYCON
выполняется
в отдельном такте
IPO
ICYCOF
Все последующие кадры технологического цикла после
ICYCOF выполняются в одном такте
IPO
Указание
Обе языковые команды ICYCON и ICYCOF действуют только на программном уровне. В
программе обработки детали обе команды игнорируются без какой-либо реакции.
Пример для режима обработки
ICYCOF
Такт IPO
PROC
TECHNOCYC
1.
$R1=1
2.25
POS[X]=100
26.
ICYCOF
26.
$R1=2
26.
$R2=$R1+1
26.
POS[X]=110
26.
$R3=3
26.
RET
Расширенное программирование
10-72 Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
Не для продажи
со станком

Синхронные действия движения
10.5 Технологические циклы
10.5.5 Каскадирование технологических циклов
Функция
Возможно выполнение макс. 8 подключенных последовательно технологических циклов.
Таким образом, в одном синхронном действии может быть запрограммировано несколь-
ко технологических циклов.
Программирование
ID=1
WHEN
$AA_IW[X]>50
DO
TEC1($R1)
TEC2
TEC3(X)
Последовательность обработки
Технологические циклы обрабатываются последовательно (каскадом) слева направо
согласно указанному выше программированию. Если цикл должен быть обработан в
режиме ICYCON, то он задерживает все последующие обработки. Возникшая ошибка
отменяет все последующие операции.
10.5.6 Технологические циклы в покадровых синхронных действиях
Функция
Технологические циклы возможны и в покадровых синхронных действиях.
Если время выполнения технологического цикла больше времени обработки со-
ответствующего кадра, то технологический цикл отменяется при смене кадра.
Указание
Технологический цикл не препятствует смене кадра.
Расширенное программирование
Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
10-73
Не для продажи
со станком