Руководство ООО Сименс, Расширенное программирование SINUMERIK 840D
Подождите немного. Документ загружается.

Качание
11.1 Асинхронное качание
Параметры
OSP1
[ось]=
OSP2
[ось]=
OST1
[ось]=
OST2
[ось]=
Позиция точки возврата
1
(качание:
левая точка возврата)
Позиция точки возврата
2
(качание:
правая точка возврата)
Время задержки в точках возврата в секундах
FA[ось]=
Подача оси качания
OSCTRL
[ось]=
(опции установки, сброса)
OSNSC
[ось]=
Число ходов выхаживания
OSE
[ось]=
Конечная позиция
OS
[ось]=
1
=
включить качающуюся ось;
0
=
выключить качающуюся ось
Время задержки в точках возврата: OST1, OST2
Время задержки Параметры движения в области точного останова, на точке возврата
-2 Интерполяция продолжается без ожидания точного останова
-1 Ожидание точного останова грубого
0 Ожидание точного останова точного
>0 Ожидание точного останова точного с последующим соблюдением времени задержки
Единица для времени задержки идентична запрограммированному через G4 времени
задержки.
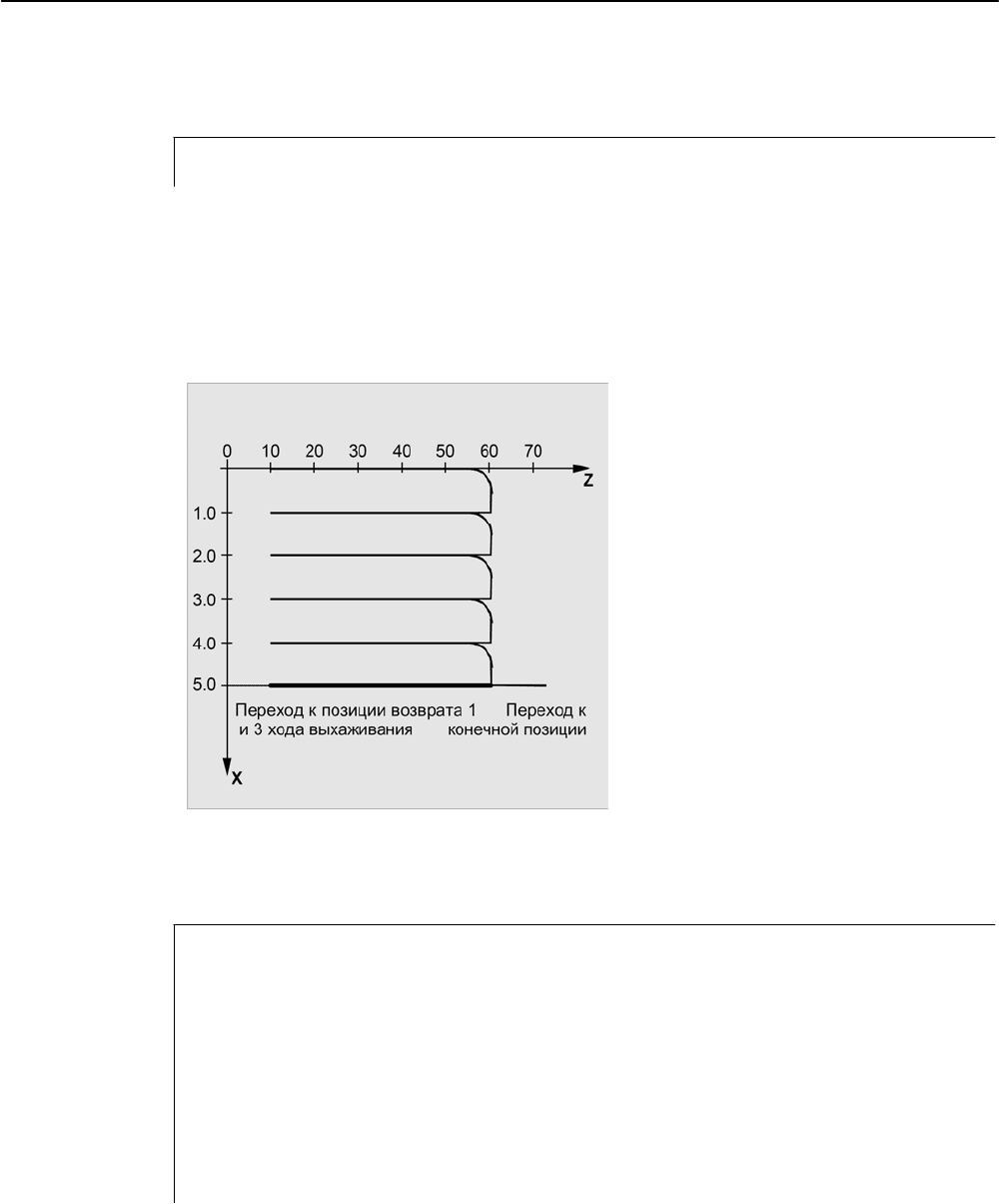
Пример:
качающаяся ось должна качаться между двумя точками возврата
Качающаяся ось должна качаться между 10 и 100. Подвод к точке возврата 1 с точным
остановом точным, к точке возврата 2 с точным остановом грубым. Работа должна
выполняться с подачей 250 для качающейся оси.
В конце обработки должны быть
выполнены 3 хода выхаживания и осуществлен подход к конечной позиции 200
с качающейся осью.
Подача для оси подачи равна 1, конец подачи в направлении Х
на 15.
WAITP(X,Y,Z)
;исходное положение
G0
X100
Y100
Z100
;переключение на режим позиционирующей оси
N40
WAITP(X,Z)
N50
OSP1[Z]=10
OSP2[Z]=100
->
->
OSE[Z]=200
->
->
OST1[Z]=0
OST2[Z]=n1
->
->
FA[Z]=250
FA[X]=1
->
->
OSCTRL[Z]=(4,0)
->
->
OSNSC[Z]=3
->
N60
OS[Z]=1
N70
WHEN
$A_IN[3]==TRUE
->
->
DO
DELDTG(X)
;точка возврата
1,
точка возврата
2
;конечная позиция
;время задержки на U1:
точный останов точный;
;время задержки на U2:
точный останов грубый
;подача качающейся оси, оси подачи
;опции установки
;три хода выхаживания
;запустить качание
;стирание остаточного пути
N80
POS[X]=15
;исходные положения оси Х
N90
POS[X]=50
N100
OS[Z]=0
;остановить качание
M30
-> может быть запрограммировано в одном кадре.
Расширенное программирование
11-2 Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
Не для продажи
со станком
Качание
11.1 Асинхронное качание
Пример качания с изменением позиции возврата в режиме
Online
Установочные данные
Необходимые для асинхронного качания установочные данные могут быть
установлены в программе обработки детали.
Если запись в установочные данные осуществляется в программе обработки детали
напрямую, то изменение активируется уже на момент предварительной обработки.
Синхронное поведение может быть достигнуто через остановку предварительной
обработки STOPRE.
$SA_OSCILL_REVERSE_POS1[Z]=-10
$SA_OSCILL_REVERSE_POS2[Z]=10
G0
X0
Z0
WAITP(Z)
ID=1
WHENEVER
$AA_IM[Z]
<
$$AA_OSCILL_REVERSE_POS1[Z]
DO
$AA_OVR[X]=0
ID=2
WHENEVER
$AA_IM[Z]
<
$$AA_OSCILL_REVERSE_POS2[Z]
DO
$AA_OVR[X]=0
;если фактическое значение качающейся оси
;превысило точку возврата,
;то ось подачи останавливается.
OS[Z]=1
FA[X]=1000
POS[X]=40
;включить качание
OS[Z]=0
;выключить качание
M30
Описание
Для качающейся оси действует:
• Любая ось может использоваться как качающаяся ось.
• Одновременно может быть активно несколько качающихся осей (макс.: число
позиционирующих осей)
• Для качающейся оси всегда активна линейная интерполяция G1, независимо от
актуальной действующей в программе команды G.
Качающаяся ось может
• быть входной осью для динамической трансформации,
• быть ведущей осью для Gantry осей и буксируемых осей,
• перемещаться
– без ограничения рывка (BRISK) или
– с ограничением рывка (SOFT)
– с ломаной характеристикой ускорения (как позиционирующие оси).
Расширенное программирование
Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
11-3
Не для продажи
со станком
Качание
11.1 Асинхронное качание
Точки возврата качания
При определении позиций качания учитывать актуальные смещения:
• абсолютное указание
OSP1[Z] = значение 1
Позиция точки возврата = сумма смещений + запрограммированное значение
• относительное указание
OSP1[Z] = IC(значение)
Позиция точки возврата = точка возврата 1 + запрограммированное значение
Пример:
N10 OSP1[Z] = 100 OSP2[Z] = 110
.
.
N40 OSP1[Z] = IC(3)
Указание
WAITP(ось):
• Если необходимо качание с гео-осью, то она должна быть разрешена с WAITP для
качания.
• После завершения качания с помощью этой команды качающаяся ось снова
регистрируется как позиционирующая ось и снова возможно ее обычное использование.
Качание с синхронными действиями движения и временем задержки,
OST1/OST2
По истечении установленного времени задержки для качания выполняется внутренняя
смена кадра (видно по новым остаточным путям осей) При смене кадра проверяется
функция отключения. При этом функция отключения определяется согласно
выполненной установке СЧПУ для процесса движения "OSCTRL". Этой характеристикой в
функции времени можно управлять через процентовку подачи.
При определенных обстоятельствах после этого, перед запуском ходов выхаживания
или подводом к конечной позиции, выполняется еще один ход качания. При этом
создается впечатление, что изменяется характеристика отключения. Но это не так.
Установка подачи,
FA
В качестве скорости подачи действует определенная скорость подачи
позиционирующей оси. Если скорость подачи не определена, то действует
зафиксированное в машинных данных значение.
Расширенное программирование
11-4 Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
Не для продажи
со станком
Качание
11.1 Асинхронное качание
Определение процесса движения, OSCTRL
Установки управления для процесса движения выполняются с опциями установки и
сброса.
OSCTRL[качающаяся ось] = (опция установки, опция сброса)
Опции установки определены следующим образом (опции сброса отменяют установки):
Опции сброса
Эти опции отключаются (только, если прежде они были включены как опции установки).
Опции
установки
Эти опции переключаются. При программировании OSE (конечная позиция) не явно
активируется опция 4.
Значение опции Объяснение
0 При отключении маятникового движения остановка в следующей точке
возврата (предустановка); возможно только через сброс значений 1 и 2
1 При отключении маятникового движения остановка в точке возврата 1
2 При отключении маятникового движения остановка в точке возврата 2
3 При отключении маятникового движения не выполнять подвод к точке
возврата, если ходы выхаживания не запрограммированы
4 После
выхаживания подвод к конечной позиции
8 Если маятниковое движение отменяется стиранием остатка пути:
после выполнить ходы выхаживания и при необходимости подвод к конечной позиции
16 Если маятниковое движение отменяется стиранием остатка пути: как при
отключении выполнить подвод к соответствующей позиции возврата
32 Измененная подача активна только со следующей точки возврата
64 FA рано 0, FA = 0: наложение хода активно
FA отлично от 0, FA <> 0: наложение скорости активно
128 Для круговой оси DC (кратчайший путь)
256 =ход выхаживания выполняется как двойной ход (стандарт)
1=ход выхаживания выполняется как одиночный ход.
Несколько опций соединяются символом плюс.
Пример:
Маятниковое движение для оси Z при отключении должно остановиться в точке
возврата 1.
При этом
• должен быть выполнен подвод к конечной позиции,
• измененная подача должна быть сразу активирована и после стирания остатка пути
ось должна сразу же остановиться
OSCTRL[Z] = (1+4,16+32+64)
Расширенное программирование
Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
11-5
Не для продажи
со станком
Качание
11.2 Управляемое через синхронные действия качание
11.2
Управляемое через синхронные действия качание
Функция
При этом типе качания движение подачи разрешено только на точках возврата или в
пределах определенных диапазонов возврата.
В зависимости от требований, при подаче маятниковое движение может быть
• продолжено или
• остановлено до полного выполнения подачи.
Программирование
1. Определение параметров для качания
2. Определение синхронных действий движения
3. Согласование осей, определение подачи
Параметры
OSP1[качающаяся ось]=
Позиция точки возврата
1
OSP2[
качающаяся ось
]=
Позиция точки возврата
2
OST1[
качающаяся ось
]=
Время задержки в точке возврата 1 в
секундах OST2[
качающаяся ось
]=
Время задержки в точке возврата 2 в
секундах FA[
качающаяся ось
]=
Подача качающейся оси
OSCTRL[
качающаяся ось
]=
Опции установки или сброса
OSNSC[
качающаяся ось
]=
Число ходов выхаживания
OSE[
качающаяся ось
]=
Конечная позиция
WAITP(
качающаяся ось
)
Разрешить ось для качания
Согласование осей, подача
OSCILL[качающаяся ось] = (ось подачи1, ось подачи2, ось подачи3)
POSP[ось подачи] = (Endpos, частичная длина, режим)
OSCILL
Согласовать ось(и) подачи с качающейся осью
POSP
Определить общую и частичные подачи (см.
главу Управление файлами и программами)
Endpos
Конечная позиция для оси подачи, после прохождения всех
частичных подач.
Частичная длина
Размер частичной подачи в точке возврата/диапазоне
возврата
Режим
Разделение общей подачи на частичные подачи
=
два заключительных шага одинакового размера
(предустановка);
=
все частичные подачи имеют одинаковый размер
Расширенное программирование
11-6 Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
Не для продажи
со станком
Качание
11.2 Управляемое через синхронные действия качание
Синхронные действия движения
WHEN…
…
DO
если…,
то…
WHENEVER
…
DO
всегда когда…,
тогда…
Пример
В точке возврата 1 подача не должна выполняться. Для точки возврата 2 подача
должна быть выполнена уже на расстоянии ii2 перед точкой возврата 2 и
качающаяся ось в точке возврата не должна ожидать завершения частичной подачи.
Ось Z это качающаяся ось, а ось Х – это ось подачи.
=
8PNHKUSRVLWLRQ
DQIDKUHQ
XQG
$XVIHXHUXQJVK
?
EH
(QGSRVLWLRQ
DQIDKUHQ
;
1. Параметры для качания
DEF
INT
ii2
Определить переменную для диапазона возврата 2
OSP1[Z]=10
OSP2[Z]=60
Определить точку возврата 1 и 2
OST1[Z]=0
OST2[Z]=0
Точка возврата
1:
точный останов точный
Точка возврата
2:
точный останов точный
FA[Z]=150
FA[X]=0.5
Подача качающейся оси
Z,
подача оси подачи
X
OSCTRL[Z]=(2+8+16,1)
Отключить маятниковое движение в точке возврата
2;
после
RWL выхаживание и подвод к конечной позиции;
после
RWL
подвод к соответствующей позиции возврата
OSNC[Z]=3
Ходы выхаживания
OSE[Z]=70
Конечная позиция
=
70
ii2=2
Установить диапазон возврата
WAITP(Z)
Разрешить качание для оси
Z
Расширенное программирование
Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
11-7
Не для продажи
со станком

Качание
11.2 Управляемое через синхронные действия качание
2. Синхронное действие движения
WHENEVER
$AA_IM[Z]<$SA_OSCILL_REVERSE_POS2[Z]DO
->
->
$AA_OVR[X]=0
$AC_MARKER[0]=0
Всегда когда
меньше
тогда
и
актуальная позиция качающейся оси Z
в
MСS
чем начало диапазона возврата
2,
установить осевую процентовку оси подачи Х на
0%
идентификатор с индексом 0 на значение
0.
WHENEVER
$AA_IM[Z]>=$SA_OSCILL_REVERSE_POS2[Z]
DO
$AA_OVR[Z]=0
Всегда когда
больше/равна
тогда
актуальная позиция качающейся оси Z
в
MСS
позиции возврата 2,
установить осевую процентовку качающейся оси Z на
0%
WHENEVER
$AA_DTEPW[X]==0
DO
$AC_MARKER[0]=1
Всегда когда
одинаковый
тогда
остаточный путь частичной подачи,
установить идентификатор с индексом 0 на значение
1.
WHENEVER
$AC_MARKER[0]==1
DO
$AA_OVR[X]=0
$AA_OVR[Z]=100
Всегда когда
одинаковый
тогда
идентификатор с индексом
0
,
установить осевую процентовку оси подачи Х на
0%,
это
предотвращает слишком раннюю подачу
(качающаяся ось
Z
еще не
вышла из диапазона возврата 2,
но ось подачи
X
готова для
повторной подачи)
установить осевую процентовку качающейся оси
Z
на
100%
(тем самым 2-ое синхронное действие отменяется).
-> должно быть запрограммировано в одном кадре.
3. Запустить качание
OSCILL[Z]=(X)
POSP[X]=(5,1,1)
;запуск осей
;качающейся оси Z
в качестве оси подачи присваивается
ось Х
;ось Х должна двигаться до конечной позиции 5 с шагом в
1.
M30
;конец программы
Описание
1. Определение параметров качания
Перед кадром движения, содержащим согласование оси подачи и качающейся оси, а
также определение подачи, необходимо определить параметры для качания (см.
"Асинхронное качание").
2. Определение синхронных действий движения
Через синхронные условия осуществляется:
Подавлять подачу, пока качающаяся ось находится в диапазоне возврата
(ii1, ii2) или на точке возврата (U1, U2). Остановить маятниковое
движение при подаче в точке возврата. Снова запустить
маятниковое движение после завершения частичной подачи.
Определить старт следующей частичной подачи.
3. Согласовать качающуюся ось и ось подачи, а также определить общую и частичную
подачу.
Расширенное программирование
11-8 Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
Не для продажи
со станком

Качание
11.2 Управляемое через синхронные действия качание
Определение параметров качания
Согласование качающейся оси и оси подачи: OSCILL
OSCILL[качающаяся ось] = (ось подачи1, ось подачи2, ось подачи3)
С помощью команды OSCILL выполняются согласования осей и старт маятникового
движения. Одной качающейся оси может быть присвоено макс. 3 оси подачи.
Указание
Перед стартом качания необходимо определить синхронные условия для поведения
осей.
Определение подач: POSP
POSP[ось подачи] = (Endpos, частичная длина, режим)
С помощью команды POSP СЧПУ сообщается:
• Общая подача (через конечную позицию)
• Размер соответствующей частичной подачи на точке возврата или в диапазоне
возврата
• Поведение частичной подачи при достижении конечной позиции (через режим)
Режим = 0 Для обоих последних частичных подач выполняется
разделение оставшегося пути до конечной точки на 2
заключительных шага равного размера (предустановка).
Режим = 1 Все частичные подачи имеют одинаковый размер. Они
вычисляются из общей подачи.
Определение синхронных действий движения
Выполняемые в дальнейшем синхронные действия движения находят общее
применение для качания.
Они находят примеры для решения отдельных задач, служащих функциональными
элементами для создания прикладных пользовательских движений качания.
Указание
В отдельных случаях синхронные условия могут программироваться и по другому.
Кодовые слова
WHEN … DO … когда…, тогда…
WHENEVER … DO всегда когда…, тогда…
Расширенное программирование
Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
11-9
Не для продажи
со станком

Качание
11.2 Управляемое через синхронные действия качание
Функции
С помощью подробно описанных ниже языковых средств могут быть реализованы
следующие функции:
1. Подача в точке возврата.
2. Подача в диапазоне возврата.
3. Подача в обеих точках возврата.
4. Остановка маятникового движения в точке возврата.
5. Перезапуск маятникового движения.
6. Не запускать частичную подачу слишком рано.
Для всех представленных здесь в качестве примера синхронных действий имеются
допущения:
• точка возврата 1 < точка возврата 2
• Z = качающаяся ось
• X = ось подачи
Указание
Подробные пояснения см. главу "Синхронные действия движения".
Согласовать качающуюся ось и ось подачи, а также определить общую и частичную подачу
Подача в диапазоне возврата
Движение подачи должно начинаться в пределах диапазона возврата до достижения
точки возврата.
Эти синхронные действия препятствуют движению подачи до тех пор, пока качающаяся
ось находится в диапазоне возврата.
С учетом приведенных выше допущений получаются следующие операторы:
Диапазон возврата 1:
WHENEVER $AA_IM[Z]>$SA_OSCILL_RESERVE_POS1[Z]+ii1 DO $AA_OVR[X] = 0
Всегда когда
больше
тогда
Диапазон возврата 2:
актуальная позиция качающейся оси
в
MСS
чем начало диапазона возврата
1,
установить осевую процентовку оси подачи на
0%.
WHENEVER $AA_IM[Z]<$SA_OSCILL_RESERVE_POS2[Z]+ii2 DO $AA_OVR[X] = 0
Всегда когда
меньше
тогда
актуальная позиция качающейся оси
в
MСS
чем начало диапазона возврата
2,
установить осевую процентовку оси подачи на
0%.
Расширенное программирование
11-10 Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
Не для продажи
со станком

Качание
11.2 Управляемое через синхронные действия качание
Подача в точке возврата
Пока качающаяся ось не достигла точки возврата, движение оси подачи не
выполняется.
С учетом приведенных выше допущений получаются следующие операторы:
Диапазон возврата 1:
WHENEVER $AA_IM[Z]<>$SA_OSCILL_RESERVE_POS1[Z] DO $AA_OVR[X] = 0
→
→
$AA_OVR[Z] = 100
Всегда когда
больше или меньше
тогда
и
Диапазон возврата 2:
Для точки возврата 2:
актуальная позиция качающейся оси Z
в
MСS
чем позиция точки возврата
1,
установить осевую процентовку оси подачи Х на
0%
осевую процентовку качающейся оси Z на
100%.
WHENEVER $AA_IM[Z]<>$SA_OSCILL_RESERVE_POS2[Z] DO $AA_OVR[X] = 0
→
→
$AA_OVR[Z] = 100
Всегда когда
больше или меньше
тогда
и
актуальная позиция качающейся оси Z
в
MСS
чем позиция точки возврата
2,
установить осевую процентовку оси подачи Х на
0%
осевую процентовку качающейся оси Z на
100%.
Остановка маятникового движения в точке возврата
Качающаяся ось останавливается на точке возврата, одновременно начинается
движение подачи. Маятниковое движение продолжается после полного
завершения движения подачи.
Одновременно это синхронное действие может использоваться для того, чтобы
запустить движение подачи, если оно было остановлено предшествующим
синхронным действием, которое еще активно.
С учетом приведенных выше допущений получаются следующие операторы:
Диапазон возврата 1:
WHENEVER $SA_IM[Z]==$SA_OSCILL_RESERVE_POS1[Z] DO $AA_OVR[X] = 0
→
→
$AA_OVR[Z] = 100
Всегда когда
равна
тогда
и
Диапазон
возврата 2:
актуальная позиция качающейся оси
в
MСS
позиции возврата 1,
установить осевую процентовку качающейся оси на
0%
установить осевую процентовку оси подачи на
100%.
WHENEVER $SA_IM[Z]==$SA_OSCILL_RESERVE_POS2[Z] DO $AA_OVR[X] = 0
→
→
$AA_OVR[Z] = 100
Всегда когда
равна
тогда
и
актуальная позиция качающейся оси
в
MСS
позиции возврата 2,
установить осевую процентовку качающейся оси на
0%
установить осевую процентовку оси подачи на
100%.
Расширенное программирование
Руководство по программированию, выпуск 03/2006, 6FC5397-2BP10-1PA0
11-11
Не для продажи
со станком