Руководство. Основы, Справочник по программированию Sinumerik 840D (new)
Подождите немного. Документ загружается.


Основы
Справочник по программированию 02/2011, 6FC5398-1BP40-1PA0
191
9
Команды перемещения
9.1 Общая информация по командам перемещения
Элементы контура
Запрограммированный контур детали может состоять из следующих элементов
контура:
•прямые
• дуги окружности
• винтовые линии (через наложение прямых и дуг окружностей)
Команды движения
Для изготовления этих элементов контура имеются различные команды движения:
• Движение ускоренным ходом (G0)
• Линейная интерполяция (G1)
• Круговая интерполяция по часовой стрелке (G2)
• Круговая интерполяция против часовой стрелки (G3)
Команды движения действуют модально.
Заданные конечные положения
Кадр движения содержит заданные конечные положения для перемещаемых осей
(траекторные оси, синхронные оси, позиционирующие оси).
Программирование заданных конечных положений может осуществляться в
декартовых или в полярных координатах.
Точка старта – заданная точка
Движения перемещения всегда осуществляются от последней позиции, к которой был
осуществлен переход, к запрограммированному заданному конечному положению. Это
заданное конечное положение, в свою очередь, является стартовой позицией для
следующей команды перемещения.
ВНИМАНИЕ
Один адрес оси может быть запрограммирован в кадре только один раз.
Команды перемещения
9.1 Общая информация по командам перемещения
Основы
192 Справочник по программированию, 02/2011, 6FC5398-1BP40-1PA0
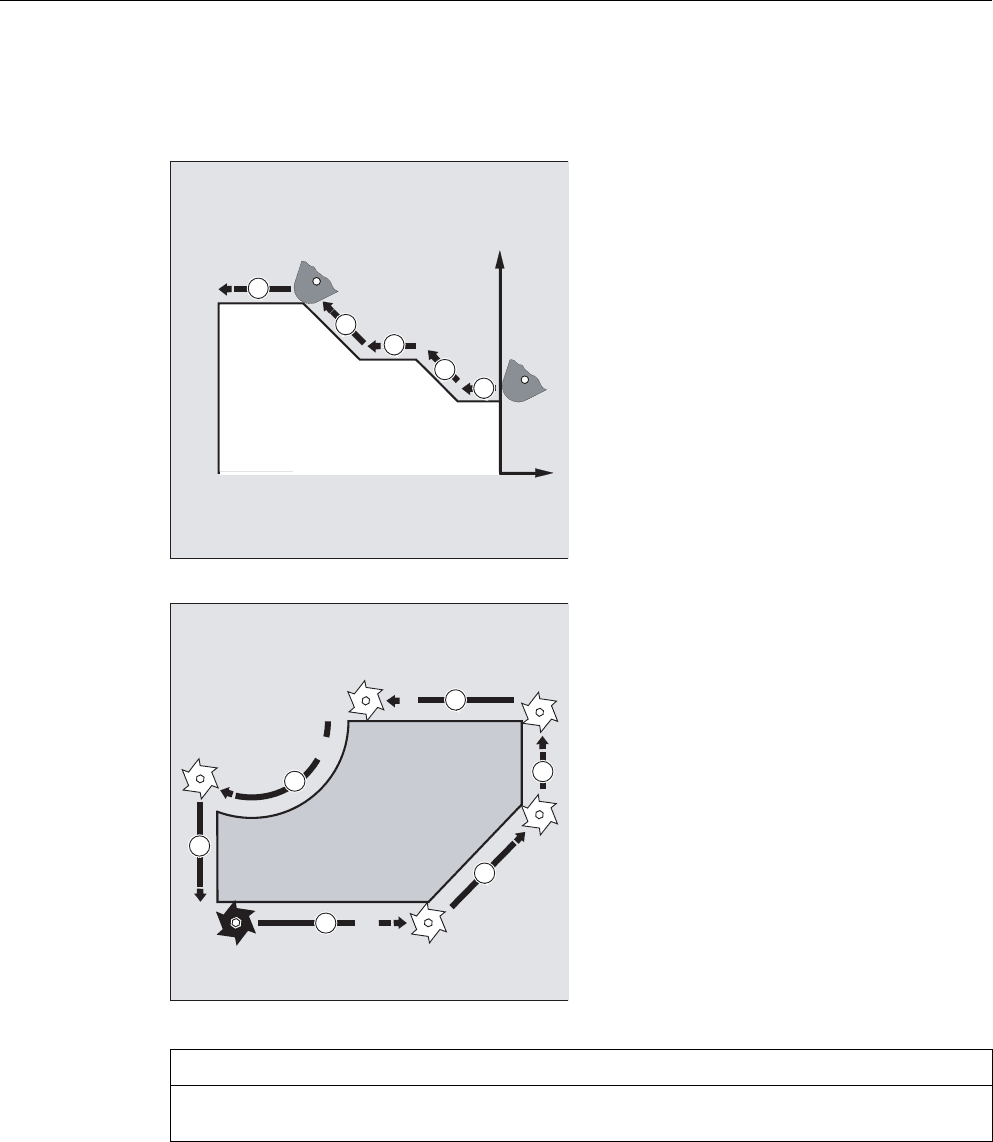
Контур детали
Выполненные последовательно друг за другом элементы контура создают контур
детали:
Изображение 9-1 Кадры движения при токарной обработке
Изображение 9-2 Кадры движения при фрезерной обработке
=
;
ЗАМЕТКА
Перед началом процесса обработки необходимо выбрать такую начальную позицию
инструмента, которая исключает повреждение инструмента и детали.

Команды перемещения
9.2 Команды движения с декартовыми координатами (G0, G1, G2, G3, X..., Y..., Z...)
Основы
Справочник по программированию, 02/2011, 6FC5398-1BP40-1PA0
193
9.2 Команды движения с декартовыми координатами (G0, G1, G2, G3,
X..., Y..., Z...)
Функция
Подвод в кадре ЧПУ к указанной в декартовых координатах позиций возможен с
ускоренным ходом G0, линейной интерполяцией G1 или круговой интерполяцией
G2/G3.
Синтаксис
G0 X... Y... Z...
G1 X... Y... Z...
G2 X... Y... Z... ...
G3 X... Y... Z... ...
Значение
G0: Команда для включения движения ускоренным ходом
G1: Команда для включения линейной интерполяции
G2: Команда для включения круговой интерполяции по часовой стрелке
G3: Команда для включения круговой интерполяции против часовой стрелки
X...: Декартова координата заданного конечного положения в направлении X
Y...: Декартова координата заданного конечного положения в направлении Y
Z...: Декартова координата заданного конечного положения в направлении Z
Примечание
Для круговой интерполяции G2/G3 кроме координат заданного конечного положения
X..., Y..., Z... необходимы и дополнительные данные (к примеру, координаты
центра окружности; см. "Типы круговой интерполяции (G2/G3, ...) [Страница 209]").
Команды перемещения
9.2 Команды движения с декартовыми координатами (G0, G1, G2, G3, X..., Y..., Z...)
Основы
194 Справочник по программированию, 02/2011, 6FC5398-1BP40-1PA0
Пример
Программный код Комментарий
N10 G17 S400 M3 ; Выбор рабочей плоскости, шпиндель вправо
N20 G0 X40 Y-6 Z2 ; Подвод к указанной в декартовых координатах стартовой
позиции ускоренным ходом
N30 G1 Z-3 F40 ; Включение линейной интерполяции, подача инструмента
N40 X12 Y-20 ; Движение по наклонной прямой к указанной в декартовых
координатах конечной позиции
N50 G0 Z100 M30 ; Свободный ход для смены инструмента ускоренным ходом
<
;;
;
<
;
=

Команды перемещения
9.3 Команды движения с полярными координатами
Основы
Справочник по программированию, 02/2011, 6FC5398-1BP40-1PA0
195
9.3 Команды движения с полярными координатами
9.3.1 Исходная точка полярных координат (G110, G111, G112)
Функция
Исходная точка измерения называется "Полюс".
Указание полюса может осуществляться в декартовых или полярных координатах.
С помощью команд G110 до G112 исходная точка для полярных координат
определяется однозначно. Поэтому на это не влияет ввод данных в абсолютном или
составном размере.
Синтаксис
G110/G111/G112 X… Y… Z…
G110/G111/G112 AP=… RP=…
Значение
G110 ...: С помощью команды G110 последующие полярные координаты
относятся к последней позиции, к которой был осуществлен подвод.
G111 ...: С помощью команды G111 последующие полярные координаты
относятся к нулевой точке актуальной системы координат детали.
G112 ...: С помощью команды G112 последующие полярные координаты
относятся к последнему действительному полюсу.
Указание:
Команды G110...G112 должны программироваться в собственном
кадре ЧПУ.
X… Y… Z…: Указание полюса в декартовых координатах
AP=… RP=…: Указание полюса в полярных координатах
AP=…:Полярный угол
Угол между полярным радиусом и горизонтальной осью
рабочей плоскости (к примеру, ось Х при G17).
Положительное направление вращения осуществляется
против часовой стрелки.
Диапазон значений: ±0…360°
RP=…: Полярный радиус
Данные указываются всегда в абсолютных
положительных значениях в [мм] или [дюймах].
Команды перемещения
9.3 Команды движения с полярными координатами
Основы
196 Справочник по программированию, 02/2011, 6FC5398-1BP40-1PA0
Пример
Примечание
В программе ЧПУ можно осуществлять покадровое переключение полярных и
декартовых указаний размеров. Через использование декартовых идентификаторов
координат (X..., Y..., Z...) происходит прямой возврат в декартову систему.
Определенный полюс сохраняется до конца программы.
Примечание
Если полюс не указывается, то действует нулевая точка актуальной системы
координат детали.
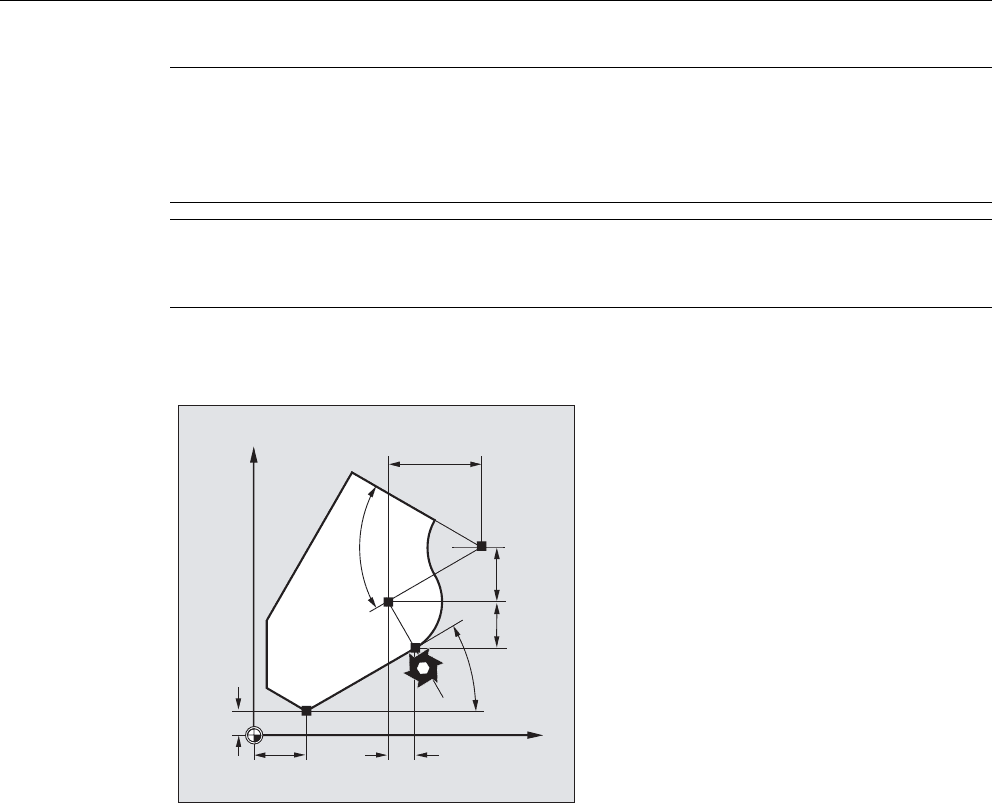
Полюса 1 до 3 определяются следующим
образом:
• Полюс 1 с G111 X… Y…
• Полюс 2 с G110 X… Y…
• Полюс 3 с G112 X… Y…
r
*;
*<
*;
*;
r
*<
*<
<
;
̶͕͒ͥ͘
̶͕͒ͥ͘
̶͕͒ͥ͘
Команды перемещения
9.3 Команды движения с полярными координатами
Основы
Справочник по программированию, 02/2011, 6FC5398-1BP40-1PA0
197
9.3.2 Команды движения с полярными координатами (G0, G1, G2, G3, AP, RP)
Функция
Команды движения с полярными координатами имеют смысл тогда, когда деталь или
часть детали измеряется из центральной точки и размеры указаны с углами и
радиусами (к примеру, на схемах сверления).
Синтаксис
G0/G1/G2/G3 AP=… RP=…
Значение
Q
P
r
r
r
r
r
<
;
G0: Команда для включения движения ускоренным ходом
G1: Команда для включения линейной интерполяции
G2: Команда для включения круговой интерполяции по часовой стрелке
G3: Команда для включения круговой интерполяции против часовой стрелки
Команды перемещения
9.3 Команды движения с полярными координатами
Основы
198 Справочник по программированию, 02/2011, 6FC5398-1BP40-1PA0
AP:Полярный угол
Угол между полярным радиусом и горизонтальной осью рабочей плоскости
(к примеру, ось Х при G17). Положительное направление вращения
осуществляется против часовой стрелки.
Диапазон значений: ±0…360°
Угол может быть указан как абсолютно, так и инкрементально:
AP=AC(...): Ввод абсолютного размера
AP=IC(...): Ввод составного размера
При вводе составного размера референтной точкой
является последний запрограммированный угол.
Полярный угол сохраняется до тех пор, пока не будет определен новый
полюс или осуществлена смена рабочей плоскости.
RP: Полярный радиус
Данные указываются всегда в абсолютных положительных значениях в [мм]
или [дюймах].
Полярный радиус сохраняется до ввода нового значения.
Примечание
Полярные координаты относятся к определенному с G110...G112 полюсу и действуют
в выбранной с G17 до G19 рабочей плоскости.
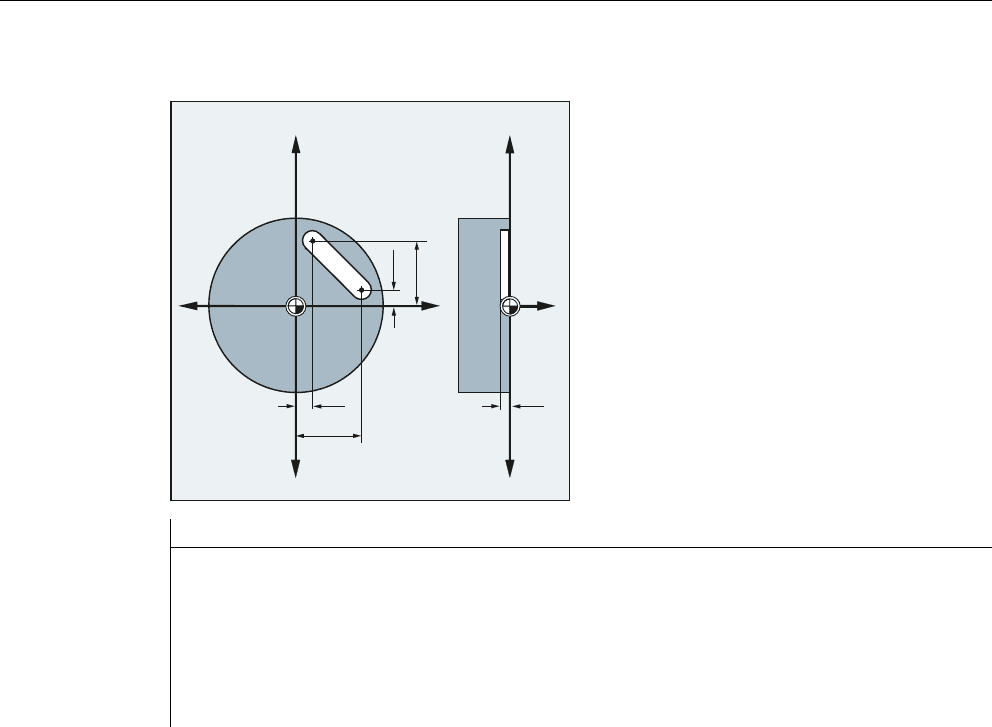
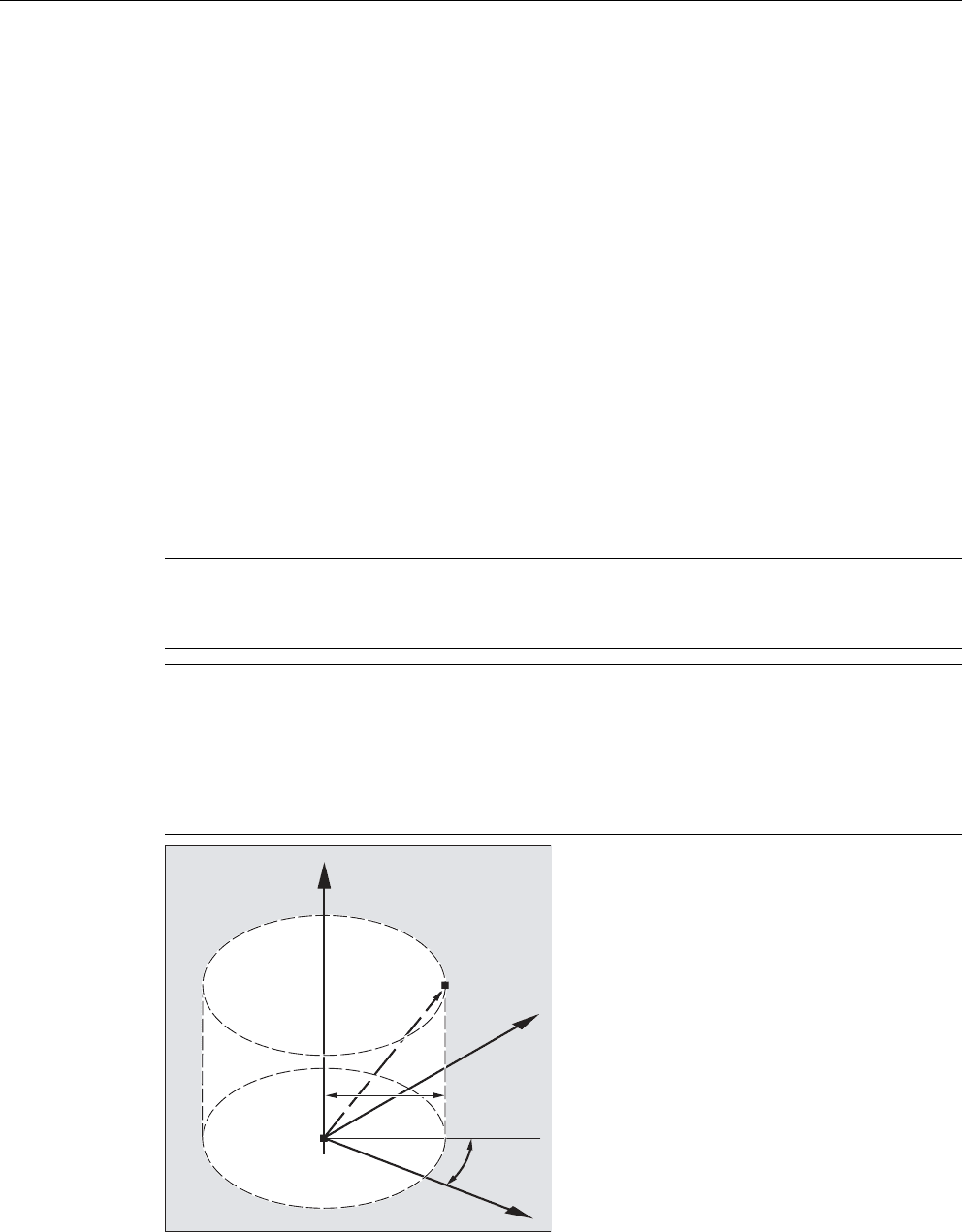
Примечание
Расположенная вертикально к рабочей плоскости 3-ья геометрическая ось может быть
дополнительно указана как декартова координата (см. рисунок ниже). Таким образом,
можно программировать пространственные характеристики в цилиндрических
координатах.
Пример: G17 G0 AP… RP… Z…
=
$3
53
Команды перемещения
9.3 Команды движения с полярными координатами
Основы
Справочник по программированию, 02/2011, 6FC5398-1BP40-1PA0
199
Граничные условия
• В кадрах ЧПУ с полярным указанием конечной точки для выбранной рабочей
плоскости не могут программироваться декартовы координаты, как то параметры
интерполяции, адреса осей и т.п.
• Если с G110 ... G112 полюс не определяется, то в качестве полюса автоматически
рассматривается нулевая точка актуальной системы координат детали:
• Полярный радиус RP = 0
Полярный радиус вычисляется из расстояния между вектором стартовой точки в
плоскости полюса и активным вектором полюса. После этого вычисленный
полярный радиус сохраняется модально.
Это действует независимо от выбранного определения полюса (G110 ... G112). Если
обе точки запрограммированы идентично, то этот радиус = 0 и выводится ошибка
14095.
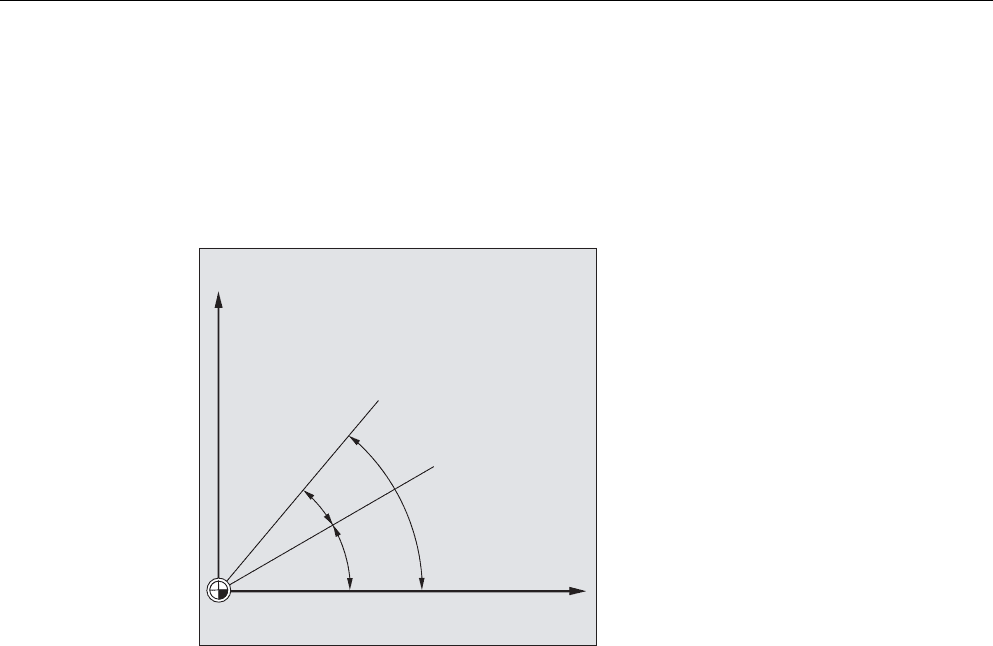
• Запрограммирован только полярный угол AP
Если в актуальном кадре программируется не полярный радиус RP, а полярный угол
AP, то при разнице между актуальной позицией и полюсом в координатах детали эта
разница используется как полярный радиус и сохраняется модально. Если разница
= 0, то заново задаются полярные координаты и модальный полярный радиус
остается на нуле.
$3
$3
$3 ,&
r
r
;
<
Команды перемещения
9.3 Команды движения с полярными координатами
Основы
200 Справочник по программированию, 02/2011, 6FC5398-1BP40-1PA0
Пример
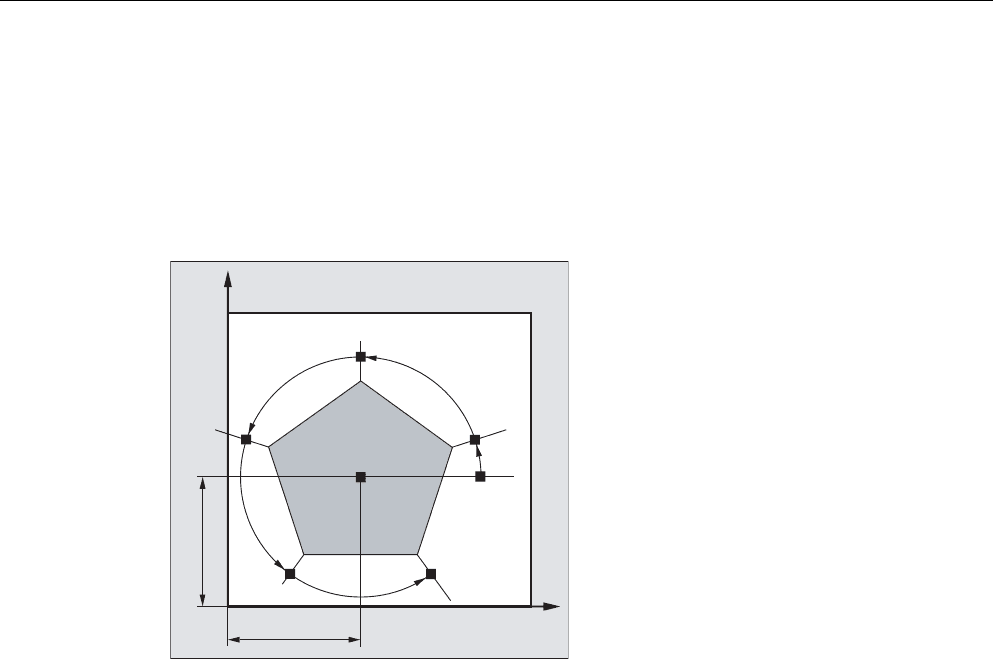
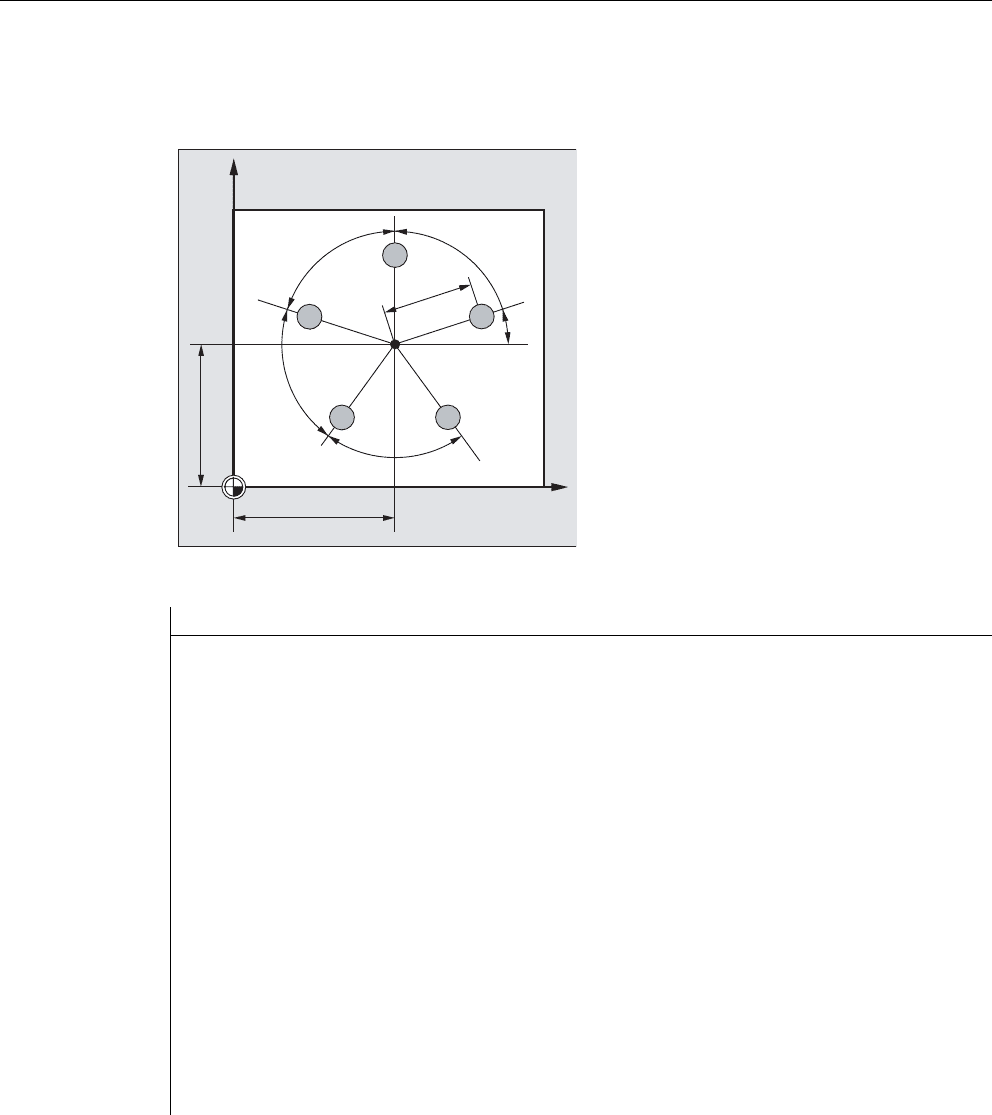
Создание схемы сверления
См. также
Типы круговой интерполяции (G2/G3, ...) Типы круговой интерполяции (G2/G3, ...)
[Страница 209]
Позиции отверстий указаны в полярных
координатах.
Каждое отверстие изготовляется одним и
тем же способом:
предварительное сверление, сверление
по размеру, развертывание …
Последовательность обработки
зафиксирована в подпрограмме.
Программный код Комментарий
N10 G17 G54 ; Рабочая плоскость X/Y, нулевая точка детали.
N20 G111 X43 Y38 ; Определение полюса.
N30 G0 RP=30 AP=18 Z5G0 ; Подвод к стартовой точке, данные в цилиндрических
координатах.
N40 L10 ; Вызов подпрограммы.
N50 G91 AP=72 ; Переход к следующей позиции ускоренным ходом,
полярный угол в составном размере, полярный радиус
из кадра N30 сохраняется и не должен указываться.
N60 L10 ; Вызов подпрограммы.
N70 AP=IC(72) .
N80 L10 …
N90 AP=IC(72)
N100 L10 …
N110 AP=IC(72)
N120 L10 …
N130 G0 X300 Y200 Z100 M30 ; Свободный ход инструмента, конец программы.
N90 AP=IC(72)
N100 L10
…
<
;
r
r
r
r
r